两镜反射系统自适应装调技术研究
2022-09-13左晓舟王章利杨海成惠刚阳刘伟光王中强
左晓舟,王章利,赵 金,苏 瑛,杨海成,惠刚阳,刘伟光,王中强
(西安应用光学研究所,陕西 西安 710065)
引言
反射式光学系统以其长焦距、高分辨率的特点,在空间遥感、国防军工等领域的应用日益广泛。最典型的结构为两镜反射系统,目前仍是航空机载平台光电装置的共光路设计首选[1-2]。两镜反射系统对主、次反射镜的面形与相对位姿敏感度较高,通常具有成像质量接近衍射极限的设计要求[3];同时,为了满足航空机载产品的工程化应用要求,保证系统性能的同时还需兼顾制造周期、可靠性等因素,这些均对该系统的装调提出了较大考验。
计算机辅助装调技术(CAA)已被较多应用于反射式系统的装调过程。对于系统波像差与失调量之间复杂的非线性关系,传统算法是对其进行线性近似处理,通过构建系统灵敏度矩阵,以解析的形式计算失调量。岳鹏远等[4]人针对随机成分多、调节灵敏度高的反射式系统精密装调问题,采用了干涉测量与计算机优化技术相结合的方法,建立了各元件失调量与初级像差之间的关系,通过初调与精调结合的方法,完成了某无焦压缩光路系统的装调。孙敬伟等人建立了计算机辅助装调模型,通过对某RC 式反射系统不同视场下的波像差测试,分析计算出次镜失调量,指导完成了系统装调,但文中提到“由于存在系统误差和调整机械结构误差,要实现精确装调需重复几次调整过程,才能获得比较好的装调结果”[4-5]。因此,计算机辅助装调的线性近似所忽略的误差、对失调量的解析求解、以及对失调量的人工复位调整,将对系统的工程化应用带来精度、效率、可靠性等问题。
当一套系统的输入与输出之间的数学模型很难精确建立时,人工神经网络(ANN)的非线性映射能力则表现出优势[6-7]。本文针对两镜反射系统波像差与失调量之间的复杂非线性数学关系,提出了一种基于ANN 的自适应装调技术,从装调映射理论出发,构建了自适应装调模型,研制了自适应装调装置并进行了实际装调验证,同时针对算法优化、微应力调校与固联等问题给出了解决方案。
1 两镜反射系统装调映射理论
典型的两镜反射系统原理如图1 所示。当主、次镜共轴时为旋转对称系统,其四阶波像差(对应三阶像差)的Seidel 多项式[8]可表示为
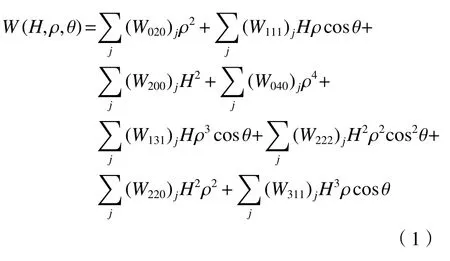
式中:W表示系统出瞳处的波像差;j表示系统中反射面的序号,分别为主镜反射面与次镜反射面;H为归一化视场高度;ρ为归一化孔径高度;θ是视场坐标H与光瞳坐标ρ之间的夹角;Wxxx为波像差系数,其下标表示多项式各展开项的幂级数。该多项式的物理意义如表1 所示[9]。
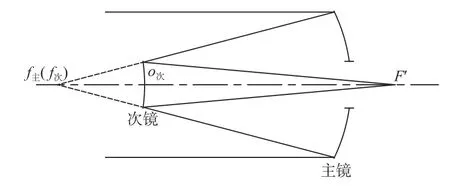
图 1 两镜反射系统Fig.1 Schematic diagram of two-mirror reflection system
该系统的装调是以主镜为基准,通过改变次镜的空间位姿将系统波像差控制在允差范围内。次镜在空间存在6 个方向的自由度,分别是沿x、y、z轴的平移与绕x、y、z轴的旋转,不考虑绕z轴的旋转,次镜在其他5 个方向的自由度会使两镜反射系统发生“失调”,两镜系统次镜失调示意图如图2 所示。系统偏心误差为δ、倾斜误差为χ、轴向偏差为ζ。
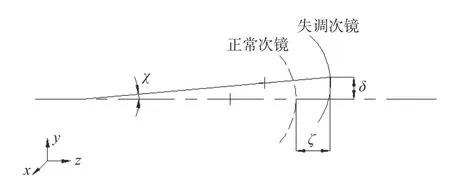
图 2 次镜失调示意图Fig.2 Schematic diagram of secondary-mirror misalignment
根据矢量像差理论,次镜因为偏心、倾斜引起的失调状态,将改变两镜系统像差场的对称中心及视场相关性[10]。我们引入像差场中心偏移矢量,用来表征失调次镜的像差场中心偏移程度。那么,将(1)式改写为矢量形式,经推导可得到失调两镜系统的波像差表达式(只考虑三阶像差)为
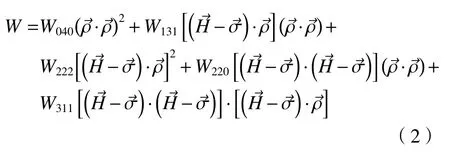
式中:W为系统波像差;和分别为视场与孔径的矢量形式;为由次镜失调引起的像差场中心偏移矢量,与次镜的偏心δ、倾斜χ存在一定的函数关系。
对于实际光学系统,次镜失调状态是空间分布的,那么可将次镜偏心与倾斜表示成矢量形式:

式中:x向偏心Dx和绕y向轴线的倾斜Ty与像差场中心偏移矢量在x方向的分量相关;y向偏心Dy和绕x向轴线的倾斜Tx与像差场中心偏移矢量在y方向的分量相关。至此,建立两镜系统波像差与失调量之间的映射关系,如图3 所示。
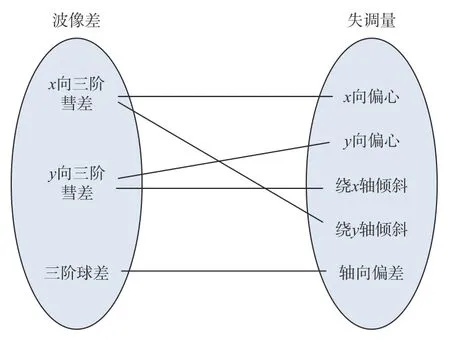
图 3 两镜系统波像差与失调量的映射关系Fig.3 Mapping relationship between wave aberration and misalignment of two-mirror reflection system
2 基于ANN 的自适应装调模型框架
两镜反射系统的自适应装调技术基于ANN,它自动获取输入数据(波像差与位置信息),通过对算法进行训练迭代,使之“适应”待调系统,然后解算并输出失调信息,从而实现自动、闭环的装调过程。自适应装调模型框架如图4 所示。
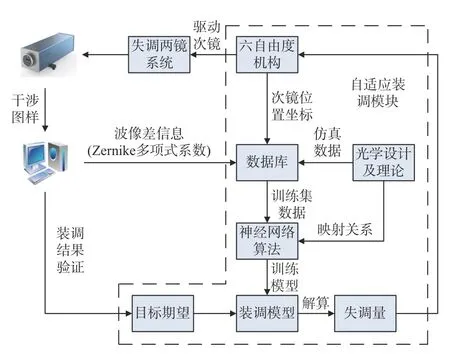
图 4 自适应装调模型框架Fig.4 Framework diagram of adaptive alignment model
干涉仪采集获取失调两镜反射系统的干涉图样,通过计算机以Zernike 多项式系数的形式将x向三阶彗差、y向三阶彗差、三阶球差输入数据库中。同时,该状态下次镜的位置坐标信息(包括x、y、z、θx、θy)由6 自由度夹持机构输入数据库,与像差信息共同构成装调数据集。次镜随机改变空间位置,将产生若干组数据,也可通过软件仿真模拟装调数据,构成数据集。该数据集对已包含映射关系的神经网络进行若干次训练与迭代[11-12],优化算法模型,然后以系统对装调目标的期望值为输入,自动解算出包含5 维信息的失调量,通过6 自由度机构驱动次镜到达目的坐标,再次测量系统波像差并与期望值比对,作为完成装调与继续训练迭代的依据。
3 装调算法设计与精度优化
基于ANN 的自适应装调算法是本文技术的核心,图5 为自适应装调神经网络的层状结构。图5 中各节点圆均代表一个神经元,输入的波像差信息通过隐藏层点作用于输出节点,经非线性变换后输出失调量信息。该算法的训练优化是通过调整各节点之间的权重、阈值等神经网络参数,使误差沿梯度方向下降[13-14],直至达到装调算法所需精度。
在Python 编程平台的Keras 框架下搭建神经网络,选择Sequential 作为神经网络模型,搭建3 个Dense(全连接网络层)作为神经网络的主体框架,以取得更好的拟合精度。其中第1 个Dense 层是输入层,输入维度为3 维,与输入的3 个zernike 多项式系数对应,输出维度为32 维;第2 个Dense 层是隐藏层,其输入维度与第一层输出相同;第3 个Dense 层是输出层,输出维度是5 维,与5 个自由度下的失调量相对应。前2 个Dense 层的激活函数选用Relu,使一部分神经元的输出为0,可将网络稀疏化,从而降低过拟合的程度和概率。同时,Relu 激活函数能够减小计算量,提升网络训练速度。
在编译环节中,使用rmsprop 优化函数对梯度计算微分平方加权平均数,可使网络算法的收敛过程平缓且快速。将MSE 均方误差作为Loss 损失函数,batch_size 设为3。
构建仿真数据库对算法网络进行训练与精度优化。根据次镜的可调范围及实际失调情况,模拟了50 组针对x、y、z、θx、θy5 个自由度的失调数据。在此基础上,按正态分布规律再随机生成1 000组扩展失调数据,位姿失调数据分布情况如图6 所示。从图6 可以看出,失调仿真数据关于0 点基本呈左右对称,代表了在一个自由度下的2 个失调方向,这与次镜的失调本质上是一种空间随机分布相符,同时,失调量值也具有较高的真实性[15-16]。
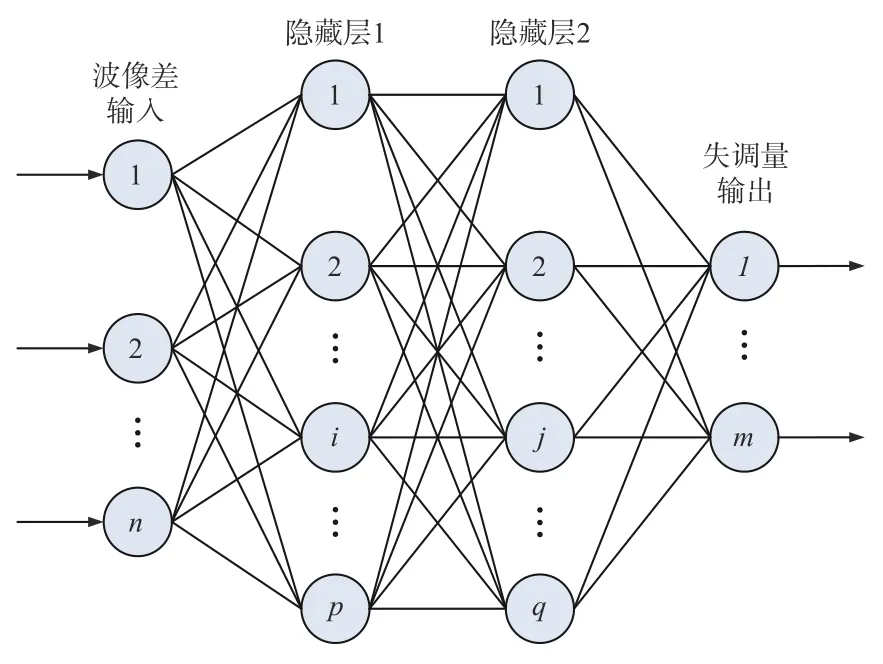
图 5 自适应装调多层神经网络结构Fig.5 Multi-layer neural network structure of adaptive alignment
在CodeV 中输入次镜的失调仿真数据,可得到Zernike 多项式中相应的Z6、Z7、Z8,与5 维失调量相映射,共同形成神经网络算法模型的精度优化数据库。对数据进行关于均值与方差的标准化预处理,并按7∶3 的比例将数据划分为训练集和测试集。
算法优化的关键是确定训练代数和样本数据量。适宜的训练代数将使模型处于欠拟合和过拟合之间,具有较高的预测精度与较强的泛化能力。具体表现为训练集的loss 值趋于平缓,测试集的loss 值位于下降与上升的拐点;样本数据量直接决定着训练时间与装调效率。样本量分别为50、100、300、600、1 000 时的算法模型训练loss 曲线如图7 所示。
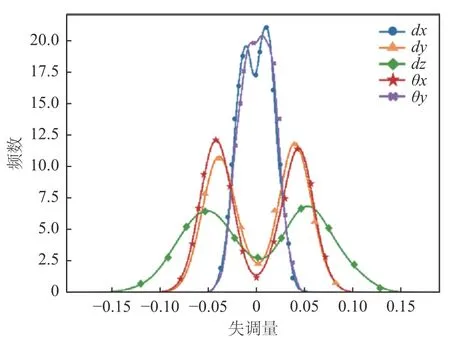
图 6 次镜失调仿真数据分布图Fig.6 Distribution diagram of secondary-mirror misalignment simulation data
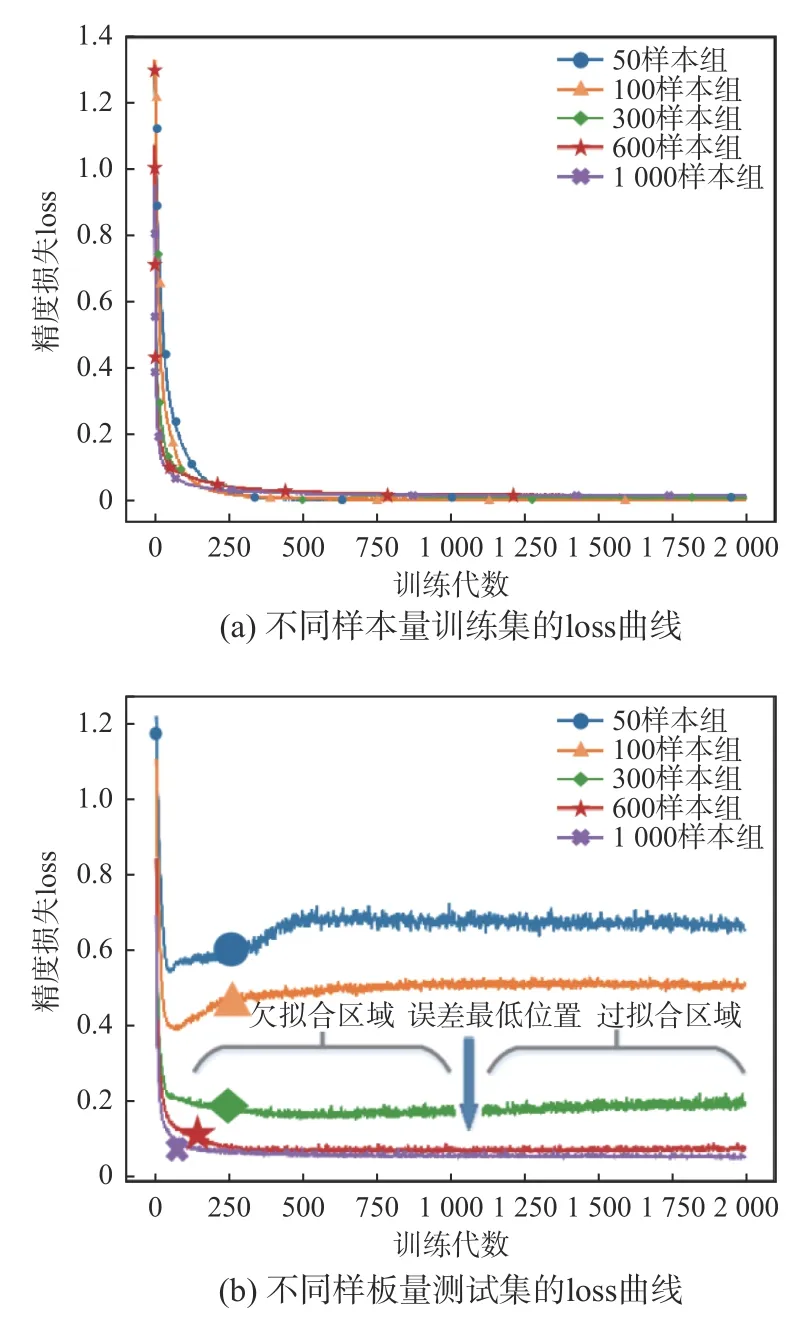
图 7 不同样本组的训练过程loss 曲线Fig.7 Loss curves of training process in different sample groups
从图7 可以看出,5 个样本组训练集的loss 函数随着训练代数的增加均持续下降,测试集的loss 函数先降后升。各样本组在一定的训练代数处,其测试集loss 值将达到最低,随后开始反弹进入过拟合区域。不同样本组的最低loss 值及其对应的训练代数如表2 所示。
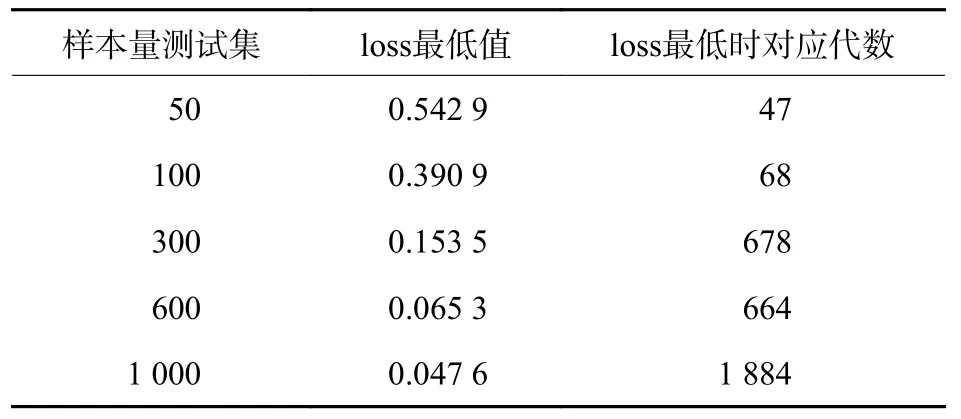
表 2 不同样本组的最低loss 值Table 2 The lowest loss value of different sample groups
由表2 可知,当样本总数据量达到600 左右时,自适应装调算法的精度已达较高水平,其对应的训练代数为664,装调精度与效率均可接受。
4 装调过程与结果
以某两镜光学系统为对象开展自适应装调,如图8 所示。该系统主、次镜均为抛物面,采用无焦准直设计,为后续光路提供压缩孔径和波前良好的平行光束。

图 8 某双抛系统光学示意图Fig.8 Schematic of certain double parabolic system
搭建系统装调光路如图9 所示。待调次镜组件连接于自适应装调装置中的6 自由度夹持机构上,使用CodeV 对次镜的位置公差进行分析,其偏心公差灵敏度为10μm、倾斜公差灵敏度为5″,轴向位置公差灵敏度达到5μm。采用装置带动次镜进行空间位移,当次镜在径向与轴向的平移量为2μm、绕x、y轴倾斜量为2″时,系统干涉图样中的条纹仍存在明显变化,表明自适应装调系统的分辨率满足该两镜系统对装调精度的要求。
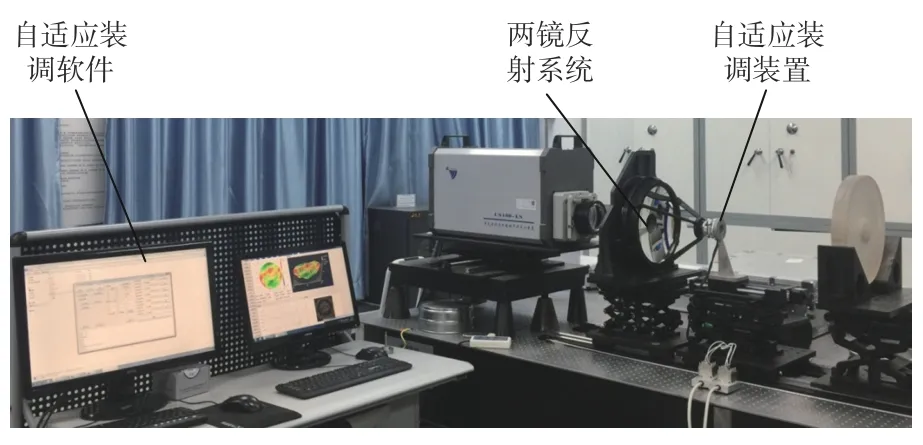
图 9 自适应装调现场图Fig.9 Adaptive alignment site
对装调数据的采集、分析、反馈控制由自适应装调软件实现,如图10 所示。基于正确训练的装调网络算法,通过干涉测试、像差与位姿数据采集、失调量自动解算、次镜位姿自动补偿等闭环操作,使次镜组件快速、准确地定位于空间理想位置,Z6、Z7、Power/Z8均小于预期值0.02。

图 10 自适应装调软件界面Fig.10 Software interface of adaptive alignment
次镜组件调校完成后,需要在短时间内完成与支撑框的固联。硅橡胶填充固化后具有一定的弹性,无法满足系统刚性要求,且固化时间较长。另外,粘接剂的固化时间与粘接应力通常成反比。为了避免固联过程中发生由应力导致的次镜位姿位移,并且满足快速、刚性固联的需求,经充分验证,在次镜座与支撑框圆周间隙处提前填充某型号紫外黏接剂,通过对粘接剂的分布、光照固化工艺等进行优化控制,使次镜组件与支撑框在较短的时间内完成固联。然后将次镜组件与自适应装调装置拆分,并最终测试系统波像差,优于λ/16,如图11 所示。
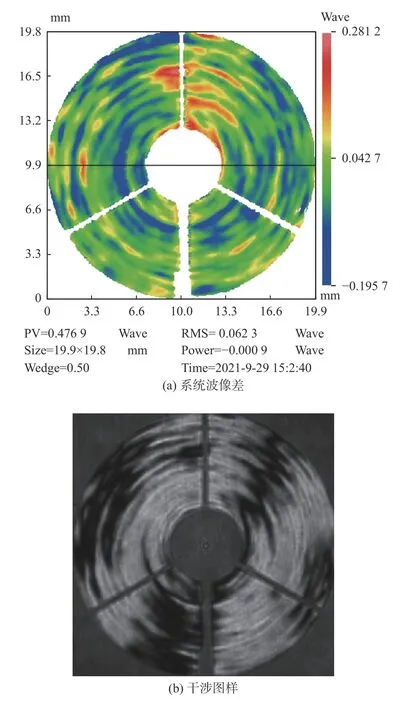
图 11 装调测试结果Fig.11 Test results of alignment
5 结论
本文针对两镜反射系统失调量与波像差之间的非线性映射关系,提出了一种基于人工神经网络的光学系统失调量解算方法与自适应装调技术。相较于传统的基于灵敏度矩阵的计算机辅助装调,此方法避免了对失调量线性近似计算引入的误差,自适应装调模型的训练以及对失调量的求解可以在很短时间内完成,且针对传统计算机辅助装调工艺在装调定位精度、失调元件可靠固定等方面存在的问题,通过自适应装调装置可实现对次镜的失调量精准校正与快速微应力固定,具有精度高、装调周期短、连接可靠性高等优点。此外,自适应装调模型对于更加复杂的多反系统同样适用。为使该技术在反射式光学系统的批量装调过程中发挥更好的作用,还需要在自适应装调坐标标定与复位等方面继续探索。
