基于光电技术的船舶航行安全监视系统设计
2022-09-09高德建
高德建
(中国人民解放军第四八零八工厂军械修理厂 山东省青岛市 266022)
近年来,水上运输行业得到了快速发展,内河、近海和远海航线较以往更加繁忙,在此背景下,如何保证船舶航行安全就显得尤为重要。目前,船舶航行安全多依托雷达、电台等实现,除技术上的明显缺陷外,功能的单一性等导致船舶航行安全问题普遍存在,因此,基于光电技术的安全监视系统为船舶航行安全提供了新的解决方案,除系统功能相对完善外,该系统还能够实现与导航雷达、电台等设备的融合,构建更加可靠、高效的船舶航行安全监视系统。
1 船舶航行安全监视系统概述
早期船舶航行安全需要通过人眼观察或近距离听声辩位来实现,随着电子信息技术的发展,导航雷达、电台、视频监视器等在船舶航行安全中得到了较为广泛的应用(如图1所示),然而,在航线日益繁忙的情况下,复杂空间电磁环境带来的干扰等对船舶航行安全监视系统的稳定性带来了显著影响,进而威胁船舶航行安全。
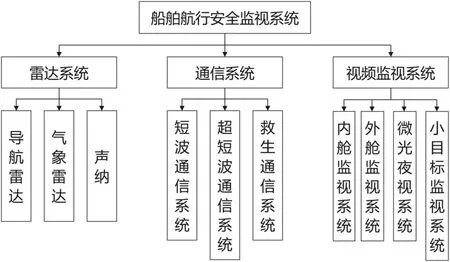
图1:船舶航行安全监视系统框架图
雷达系统是通过对周围发射不同频率的电磁波信号,通过对目标反射电磁波进行处理后,可以得出目标的实际方位、距离,并在终端设备上进行显示。与船舶航行安全监视功能相关的雷达系统构成主要包括导航雷达、气象雷达和声纳,其中,导航雷达除了能够依托GPS、罗经等导航设备实现航速、航向、经纬度等数据的测量外,还可通过软件计算与目标之间的会遇时间等。气象雷达主要用于锚泊过程中船舶动态数据的监测,提高导航系统在顺风向上的走锚灵敏度。声纳是船舶航行过程中监测水下碰撞风险的重要设备,通过声波反射原理,可以实时绘制航向路线的水下地形图,保证船舶航行安全。
通信系统为不同船舶建立了信息交互的渠道,其中,短波通信系统、超短波通信系统能够在不同距离上进行可靠信息传输,而救生通信系统不仅能够在发生紧急情况时用于向一定范围内的通信平台发射无线信号,同时还可以作为航行安全示位标使用,以提示其他船舶注意航行安全。
视频监视系统主要是通过高清摄像机、微光夜视系统实现船舶航行过程中内、外视频信号的统一管理,减轻航行过程中观察员的压力。而小目标监视系统则是利用超高清视频监视单元与导航雷达进行联动,实现包括雷达、视频跟踪等在内的复合安全监视功能。
以上三个系统的技术特征具有明显差异,通过高低搭配的组合形式,能够满足船舶航行安全监控的相关要求。在现代信息技术不断发展的过程中,以及船舶自动化水平的不断提升,以光电技术为代表的航行安全监视系统得到了更加广泛的应用。
2 传统船舶航行安全监视系统的缺陷
基于航行安全的重要性,船舶航行安全监视系统应具备较高的可靠性和稳定性,并可以满足多种复杂情况下的航行安全管理需要,然而,传统船舶航行安全监视系统却存在以下几个方面的缺陷。然而,传统船舶航行安全监视系统在技术和系统架构方面已经无法满足新时期船舶安全航行的基本要求,具体包括以下几个方面。
2.1 系统抗干扰能力不足
船舶航行安全离不开雷达系统的“视觉”支持,导航雷达、气象雷达等导航设备与无线通信系统能够适应各种类型的天气条件,即便是航行区域内降水量较大时,可以通过雨雪抑制功能调节电磁波的波长,使导航雷达终端显示更加清晰,同时保持较高的通信质量。在船舶运输行业快速发展的过程中,航线更加繁忙,且船舶自动控制系统集成化程度不断提升,船舶内外空间电磁环境更加复杂,在此背景下,导航雷达、通信系统的稳定性与可靠性将明显降低。
以导航雷达为例,近岸航行过程中同频干扰现象普遍存在,而同频干扰现象产生的主要原因在于周围目标对电磁波的多次反射,而导航雷达无法准确识别一次反射与多次反射信号之间的差异,以至于终端显示为满屏效果。如图2所示,右侧为近海锚地区域,由于锚区船舶数量较多,导航雷达偏心显示右侧区域目标粘连效果较为严重,无法区分目标数量,仅能大致了解目标集群的区域范围。由此可以看出,导航雷达抗干扰能力不足与其技术原理存在密切关系,基于导航雷达的船舶航行安全管理效果将显著下降,这对船舶航行安全造成了极大的隐患。

图2:导航雷达近岸终端偏心显示效果(右侧目标粘连)
除导航雷达以外,基于无线通信系统的船舶航行安全管理机制同样存在问题,复杂电磁空间环境中的无线通信质量将显著下降,这在一定程度上影响了船舶航行安全。以船舶进出港普遍适用的甚高频通信系统为例(Very High Frequency,VHF),由于甚高频所处的30MHz 到300MHz为开放频段,且港务繁忙的情况下,船岸通信信噪比显著降低,无法满足精准调度的要求,极易造成船舶进出港安全事故。
2.2 视频监视系统可视化功能单一
在过去较长的一段时间里,船舶视频监视系统主要依赖传统视频监控单元实现对内外环境的实时画面传输,然而,该监视系统在可视化功能方面具有明显的单一性,尤其是在雨、雪、雾等特殊天气时的能见度较低,视频监控单元所提供的画面能见度无法满足航行安全的要求。尽管,新一代视频监视系统增加了视频图像降噪功能,而降噪功能是通过滤除非关联信号所采用的一种选择机制,从实际使用情况来看并不理想,在某些情况下会将远距离目标滤除,以至于难以及时发现航线上的危险目标,导致紧急避碰所需时间不足。
以2020年8月上海长江口运油船与砂石料船相撞事件为例,由于事发时间为凌晨,水面能见度相对较低,且视频监视系统不具备夜视功能,对未采取灯火管制的水面目标无法及时进行预警,最终导致17 人遇险。通过该事件可以看出,视频监视系统作为船舶航行安全的重要辅助系统之一,其不仅需要具备全天候执勤的能力,还需要具备多种环境感知能力,否则,由于过于依赖功能单一的视频监视系统,相关人员的警惕性将显著下降,发生航行安全事故的可能性会大大提升。
视频监视系统可视化功能单一的主要原因在于配套系统软件的功能较为简单,其主要使扩展了人的可视空间,但系统缺乏对图像数据的自主分析能力。因此,视频监视系统可视化功能在船舶航行安全中的作用有限,无法满足新时期船舶航行安全的要求。
3 基于光电技术的船舶安全监视系统设计方案
随着现代光电技术的快速发展,以及人工智能技术、大数据技术和图形图像识别技术在船舶航行安全监视系统中的广泛应用,可实现基于光电技术的船舶安全监视系统优化,具体设计方案如下。
3.1 系统组成
基于光电技术的船舶安全监视系统在智能化、数字化、集成化方面有着显著提升,通过融合多平台数据信息,以及发挥光电监视系统在多元目标信息感知方面的优势,为船舶航行安全监视系统提供更加全面的数据和信息支持,其系统组成如图3所示。
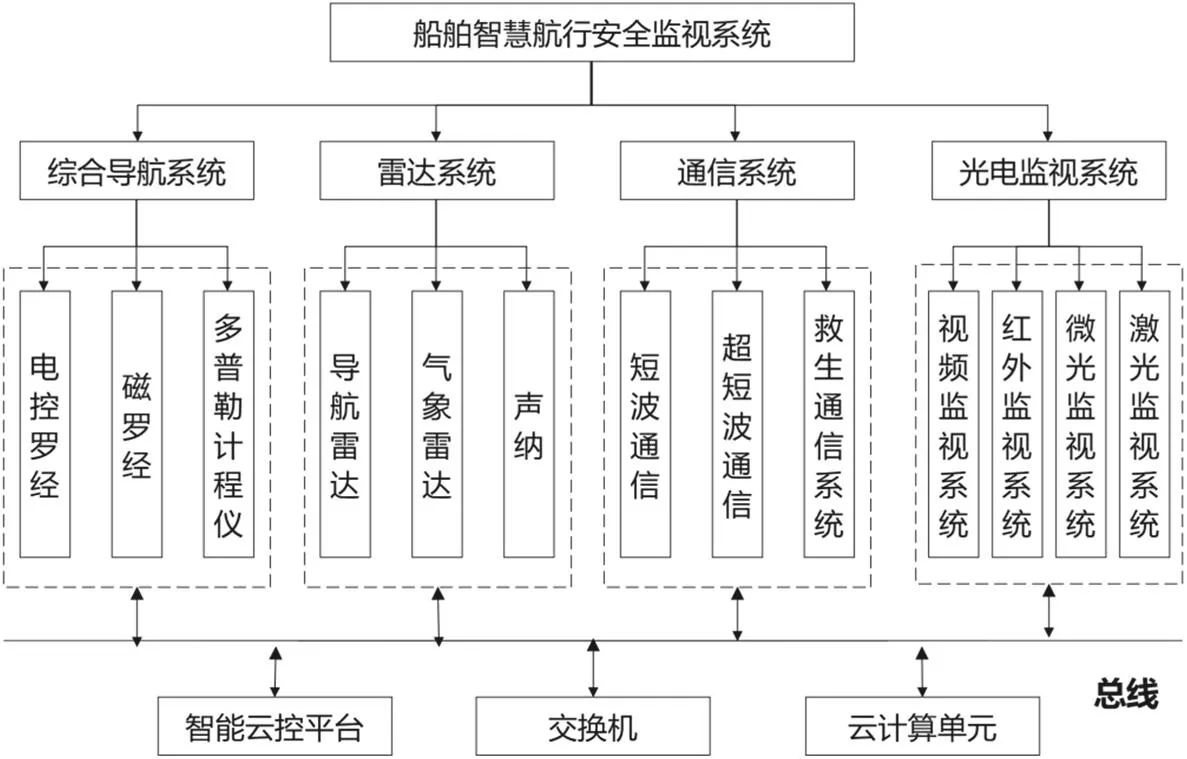
图3:船舶智慧航行安全监视系统组成图
该船舶智慧航行安全监视系统主要包括综合导航系统、雷达系统、通信系统、光电监视系统,并通过系统总线与智能云控平台、交换机、云计算单元进行关联,为船舶航行安全提供保障。
综合导航系统在船舶智慧航行安全监视系统中的使用可以实现对船舶航行数据的动态监管,以电控罗经、磁罗经和多普勒计程仪的数据为支撑,利用通信系统与各类型雷达之间进行通信,从而减少船舶航行事故发生几率。同时,在传统视频监视系统的基础上,融合了红外、微光、激光监视系统,其功能将更加丰富,创新光电监视系统的技术构成,以适应不同环境下船舶航行安全监视的要求。
3.2 系统功能优化设计
为解决传统船舶航行安全监视系统的不足,基于光电技术的船舶安全监视系统设计不仅在系统组成方面进行了优化(如图2所示),同时也丰富了其系统功能。
3.2.1 多元信息融合功能
传统船舶航行安全监视系统的数据来源较为单一,这也是导致早期船舶航行安全事故频发的主要原因之一,基于光电技术的船舶智慧航行安全监视系统设计能够实现包括导航信息、雷达信息和光电监视信息的融合,从而避免单一数据来源可信度低、精度差等问题。
以低速小目标为例,近海区域渔船作业现象较为普遍,由于其吨位较小,大型船舶在有风浪的情况下无法通过传统视频监视系统发现其踪迹,船舶智慧航行安全监视系统则可以利用导航雷达、VHF 通信单元能够及时获取航行区域内的目标信息,并通过总线将目标信息发送至智能运控平台,由运控平台对目标信息进行二次融合,为光电监视系统提供低速小目标的准确方位、距离,并通过动态调整伺服单元实现光电监视系统对目标的稳定跟踪,其原理框图如图4。
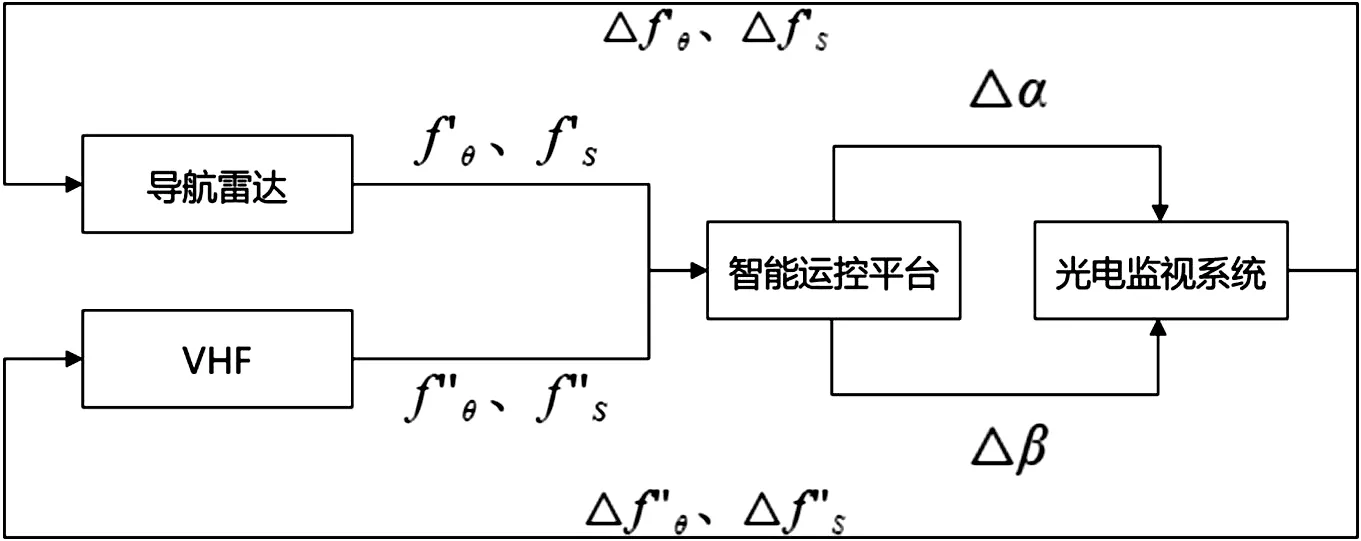
图4:低速小目标监视跟踪系统原理框图
根据图4所示低速小目标监视功能的信号变化过程可以看出,多元信息融合功能可以有效减少单一信息来源的目标参数误差,并利用负反馈设计,不断修正光电监视系统的精度,减少发生碰撞的可能。
针对反馈机制的应用依然存在诸多风险,在区分人为误差和系统误差的过程中,误差将伴随着反馈机制传递至输出端,由此,则导致误差积累后的震荡效应。所以,在多元信息融合过程中,应加强非关联平台之间的无线信号的智能化管理,并实现以数据共享为依托的多元信息融合系统,以满足船舶航行安全的需要。
3.2.2 目标光学特征辅助功能
光电技术在船舶航行安全监视系统中的应用,进一步扩展了船舶航行监视系统的可视空间和时间,针对光电技术的特点,其具备以下三种目标光学特征辅助功能。
(1)红外光学特征辅助定向。任何物体都具有红外特征,利用红外传成像设备,能够在红外特征对比明显的环境中将目标区分出来。由于海洋为低温环境,而轮船的整体温度多高于海洋(尤其是轮船的轮机舱、烟囱等位置温度较高),利用红外成像设备可以在一定范围内准确识别目标船只的方位。
例如,在雨雪、大雾天气时,能见度相对较低,红外目标特征对比清晰,有效距离最大可达20km,并能够通过红外光谱特征分析准确判定空间目标数量。然而,这里需要注意的是,红外光学特征辅助定向无法准确判定目标边界,因此,无法作为近距离航行安全管理参考,在此情况下,则需要微光夜视光学辅助功能进行弥补。
红外光学特征的使用对空间环境有着一定的要求,当航线船舶数量较多的情况下,受红外特征叠加的影响,其效果将明显下降。并且,红外光学特征定位属于点定位的一种,无法准确描绘目标轮廓,这也是限制其使用范围的又一重要原因。所以,船舶红外光学特征辅助定向主要用于发现目标,并未安全监视系统提供基础方位和距离信息。
(2)可视光学特征辅助定位。相比较红外光学特征辅助定向功能来说,微光夜视则是在对可视条件下空间目标识别能力的提升,通过强力物镜的作用,将微弱的可见光作用在像增强器上,从而使画面显示效果更佳,如图5所示。

图5:近海渡船夜视辅助监视图
由于微光夜视功能需要目标方位引导,所以,基于微光夜视的可视光学特征辅助定位设计增加了与导航雷达、电控罗经等设备的关联接口。通过对导航雷达所提供的目标数据进行分析,以及参考电控罗经的航向信息进行零位校正,以便于在更短的时间内完成目标定位和跟踪。
然而,在实际使用过程中,微光所能够看到的范围有限,尤其是对外部空间环境的照度有着基本要求,为保证船舶航行安全,应当采取复合图像增强技术,使船舶航行安全得到有效保障。同时,对图像识别后的信息与综合导航系统进行融合比对,为船舶航行安全提供参考,并能够对可疑目标进行警示。
(3)激光测距辅助定位。在确定目标船只方位的基础上,船舶智慧航行安全监视系统将参考智能云控单元的目标方位、距离等参数进行状态修正,并利用激光测距模块对目标进行精准测距。
以脉冲激光测距辅助定位单元为例,其测距公式如下:

由于t=NT,因此,测距公式还可以表示为:
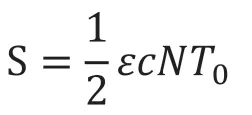
其中,ε 为特定环境下的介质常数。
c 为光在真空中传播的速度。
t 则为脉冲发射出去和接收到的时间间隔。
N 为t 时间内激光脉冲器发射的脉冲数量。
T为相邻脉冲发射的时间间隔。
激光测距辅助定位精度稳定性较差,尤其是在目标稳定性较差的情况下,校准误差、漂移误差等较大,因此,激光测距结果需要通过雷达、甚高频单元等提供的参数进行修正。同时,为保证激光测距单元的测量精度,应在允许的范围内缩短相邻两次激光脉冲发射的时间间隔,即提高脉冲发射频次。
激光辅助定位对环境的要求较高,在可视条件较好的情况下能够满足激光测距功能要求,当可视条件不满足要求的情况下,激光辅助定位系统的精度会显著降低。同时,为避免激光信号的相互干扰,需要对激光信号进行编码,编码机制应参考国际标准,这增加了激光测距辅助定位功能的设计难度。
3.2.3 智能安全识别功能
船舶航行安全监视系统多依赖导航雷达和船舶自动识别系统(Automatic Identification System,AIS),然而,由于其在复杂电磁空间下的稳定性和可靠性相对较低,因此,在该船舶航行安全监视系统设计中,则增加了以光电技术为核心的智能安全识别功能。该功能主要依赖激光测距单元、视频监视单元(红外、微光夜视)对目标距离、移动方向、移动速度等进行判定,得出最小会遇时间(Time to the Closest Point of Approach,TCPA)将判定结果与导航雷达、船舶自动识别系统的探测结果进行比对,并及时进行危险预警。
除此之外,基于光电技术的船舶航行安全监视系统还能够在动态识别危险源的基础上,根据各方航向、航速,以及气象雷达数据计算最佳避碰方案,并通过通信系统向会遇目标发送避碰方案。在实施规避动作的同时,光电监视系统将动态跟踪目标航行状态的变化情况,及时调整避碰方案。
4 总结
光电技术在船舶航行安全领域的应用将改变传统船舶航行安全保障机制,在现有技术条件下,以及针对传统船舶航行安全监视系统的技术构成,应突出光电技术的辅助作用,并强化与导航系统、通信系统、雷达系统等之间的数据关联,实现高度集成化的船舶航行安全监视系统。随着光电技术的发展,船舶航行安全监视系统的技术成熟度将得到显著提升,从而减少因可视条件差、空间电磁干扰等导致的船舶航行安全事故发生概率。
