考虑锚节点误差的凸松弛联合定位方法
2022-09-09刘玉杰李汉君
刘玉杰 李汉君
(1.中国电子科技集团公司第二十七研究所 河南省郑州市 450047 2.电子科技大学 四川省成都市 611730)
近年来,随着科技的迅速发展,无线定位早已不仅被应用于航海、航空、测绘等等方向。无论是声纳、雷达抑或自动定位,在这些领域中无线定位都已经被广泛地运用,甚至军事行动、安全业务等都将无线定位作为重要的信息手段。在实际应用环境中,定位所需的锚节点位置信息往往有所偏差,因此,基于该环境对高精度定位算法进行研究是十分必要的。
针对存在站址误差的定位场景,Ma 等人于2011年提出了一种两步加权最小二乘(TSWLS)定位算法。该算法在到达时间(TOA)测量方程中,同时使用了测量值及误差表述锚节点的实际位置,且协方差矩阵中也反映了锚节点已知位置误差的统计信息,经过设置中间变量、对原方程开方、忽略二次项等一系列步骤,并在第二步解算中利用目标位置变量和中间变量之间的关系,即可通过两步加权最小二乘的方法求解得到待定目标位置。而在多目标定位问题中,往往更多地使用协作定位。在协作定位系统中,待定位盲节点之间可以相互进行通信,对比非协作系统,能够利用更少的锚节点取得更好的定位效果。
本文将基于考虑锚节点误差的定位场景,采用协作定位,在校准锚节点站址误差的同时,提升盲节点定位精度。现有协作定位方法中,往往缺少对锚节点间测距的考虑,本文将在考虑这一信息的基础上,构建极大似然估计(MLE)问题,采用半正定松弛(SDR)算法,将原非凸目标函数转换为凸函数求解,从而实现多平台联合的精确定位。仿真结果显示,本文所提出算法,在定位精度上优于TSWLS 算法,具有良好的定位效果。
1 无线定位概述
无线定位问题,可以认为是通过距离估计技术以及信号测量技术对相关信息进行采集,并处理采集到的信息从而实现目标位置坐标求解的过程。若从数学模型角度分析,可以将定位问题视为位置坐标集合与采集信息集合之间的映射问题。
在基于距离进行定位的方法中,根据测距方式,可以将无线定位划分为以下三类:基于信号到达时间,基于信号到达角度/相位,以及基于信号强度。
基于信号到达时间的无线定位方法中,又可以划分为TOA 和TDOA 两类。TOA 方法通过对信号传播的时长进行检测,再利用信号传输的速率,对距离进行估计。TDOA 则利用了信号传输的时间差实现定位。TOA 技术也是本文后续研究所利用的定位方式。
基于信号到达角度,即AOA,通过将多个超声波接收器或天线阵列配备于接收端,同时为各节点设置对应的主轴方向,使用角度检测系统即可获取发射端方向与各节点主轴间的角度。而在基于信号到达相位,即POA 方法中,传输的是频率相同,零补偿相位的信号以及纯正弦信号,待测距离则通过载波信号的相位或相位差进行估计。基于POA 的定位系统与AOA 相同,都只能应用于LOS 的环境中,这限制了该方法的适用范围。
基于信号强度的无线定位方法有RSSI 与CSI 两类。前者应用广泛,但其测量精度会因为环境干扰引起的数值波动而降低,尤其在极限传播距离下测距会出现很大的误差情况,在应用于某个实际环境时,需要先使用测量值对传播模型进行修正。而CSI 技术相比于RSSI,无论是时间分辨率还是频率分辨率都得到了提升,它能够利用更大的信道容量,而且能够对各种类型的传播环境使用更为恰当的信号处理技术,产生各种类型的子载波幅度和相位特性,进行更为精确的位置估计。
此外,根据盲节点间的拓扑关系以及锚节点的数量进行分类,则能够将无线定位的模型划分为单目标多边定位模型和多目标协作定位模型。
单目标定位模型利用多个锚节点与单个盲节点间的测距关系,对单个盲节点进行定位。这种定位模型中,锚节点误差往往会对定位结果产生较大影响。而在多目标协作定位模型中,往往存在多个待定位盲节点,每个锚节点会与多个盲节点进行测距,而定位过程也会利用到多个盲节点间的相互测距关系。该定位模型可以更好地适应锚节点位置存在误差的环境。本文在传统多目标协作定位模型的基础上,对锚节点间测距关系加以利用,在解算盲节点坐标的同时校准锚节点位置信息。
2 建立系统模型
假定有N 个待测目标,其中包括M 个具有带误差已知坐标的锚节点,以及N-M 个位置未知的待定位盲节点平台。以上节点的真实坐标即为本章待估计未知变量,以矢量形式表示如下:

其中,x和y即为第i 个节点的坐标,当i ≤M 时其表示锚节点坐标,否则为盲节点坐标。
将锚节点带误差坐标向量表示为:



本文中,在锚节点与盲节点间测距的基础上,特别考虑加入锚节点间测距,则将各节点间距离测距值向量表示为:



其中,r表示第i 个节点和第j 个节点之间的距离实际值。n表示均值为0,方差为 的高斯随机误差。
假设各锚节点位置误差及各节点间测距误差都相互独立,则定义待求解MLE 问题为:
通过对上式进行求解,可以对锚节点与盲节点的位置信息进行联合估计。
在本文中,仅对二维空间中的多平台联合定位进行了研究讨论。在实际应用及后续研究中,可以通过一些简单的调整方式,如将多平台的坐标向量扩展至三维,并将其他变量也相应调整至更高维度空间,即可以在三维空间的多平台定位问题中,应用本文所提出的定位算法。
3 基于MLE的半正定松弛算法
本节中,将基于上节中构建的MLE 问题,利用半正定松弛得到待求解凸优化问题。
接着引入变量:

通过对上述变量的引入,可以将目标函数展开为仿射函数,具体形式如下:

接下来,将依然非凸的等式约束进行松弛,通过使用不等式约束替代等式约束,实现约束的凸化,可以得到:

以及:

根据Schur complement 定理,可以将上式等价于如下形式:

至此,通过目标函数和约束关系的松弛,我们可以得到下面的凸优化问题:
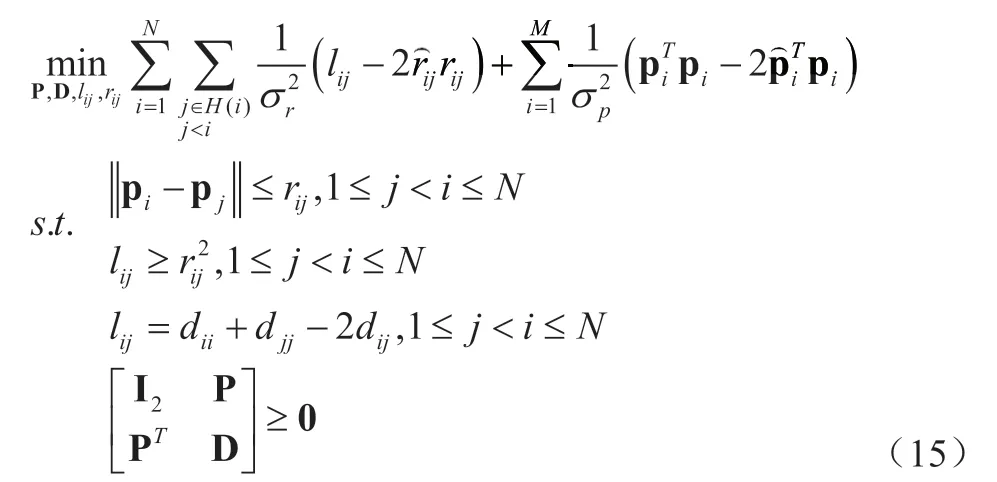
上式即为原MLE 问题的最终半正定松弛形式。半正定规划的松弛模型较为复杂,解算复杂度也较高,同时,这种松弛模型的解算效果对锚节点部署位置的依赖程度较低,能够在不同环境中进行更为精确的定位。
4 仿真结果
在仿真实验中,使用所有节点的累积定位误差定义RMSE,从而进行定位效果的比较,RMSE 表示如下:


仿真实验的设置中,将锚节点分别置于(0,0)m,(0,100)m,(100,0)m 及(100,100)m 的位置上,两个盲节点则随机生成于[-50,150]m×[-50,150]m 的范围内。在这种仿真设置中,盲节点可能位于锚节点所围成的凸包内或凸包外,可以有效地测试本文所提出算法在不同环境中的定位性能。在仿真过程中,将本文所提出的半正定松弛算法与传统TSWLS 算法的定位效果进行对比,实验的统计结果来源于1000 次蒙特卡洛实验。单次仿真实验的节点位置示意图如图1所示。
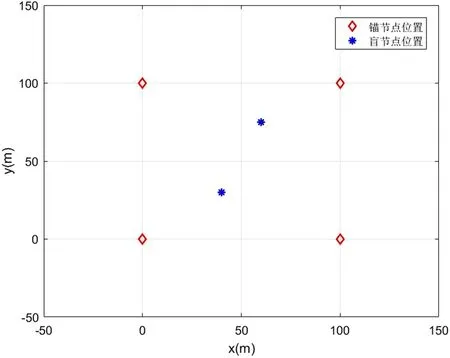
图1:实验环境节点位置示意图
图2中,展示了测距误差σ=0.2m,锚节点位置误差σ~[0.1,0.4]m 时候各算法定位效果的比较。图3中,展示了锚节点位置误差σ=0.3m,测距误差σ~[0.2,0.5]m 时候各算法定位效果的比较。
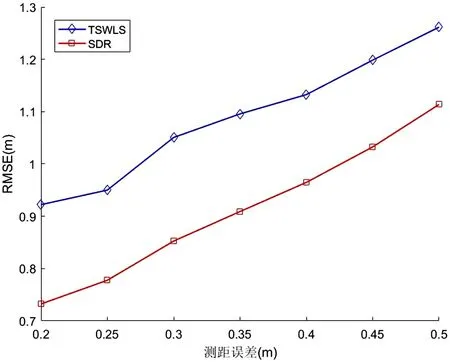
图2:不同测距误差下的定位效果对比
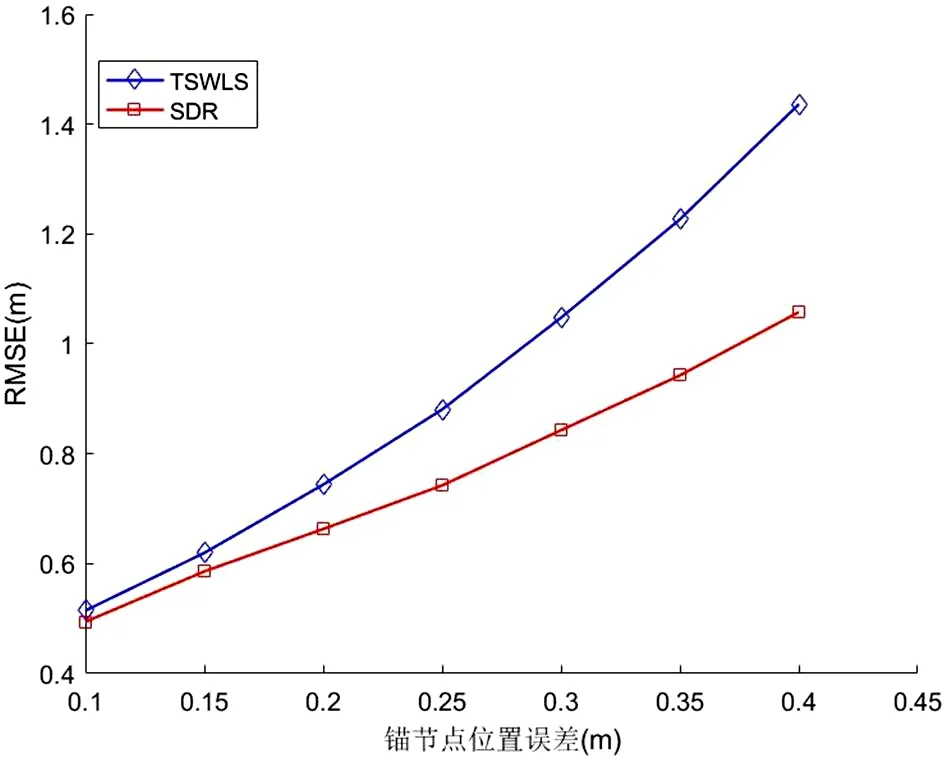
图3:不同锚节点位置误差下的定位效果对比
从仿真结果中可以看出,本文算法在考虑锚节点间测距信息,并利用多平台测量信息进行联合解算后,在不同定位环境中,均具有优于传统TSWLS 算法的定位性能,即仿真结果证明了本文算法的有效性。
5 结论
本文中,基于锚节点位置信息存在误差的环境,构建多平台联合定位模型,特别考虑加入锚节点间测距信息。利用多平台测量信息构建MLE 问题,推导了半正定松弛算法得出待求解凸优化问题。通过仿真实验,将本文算法与传统TSWLS 算法对比,本文算法不仅能得到更精确的盲节点定位结果,同时能有效校准站址误差,验证了算法的有效性。
