面向云端的汽车定位防盗报警系统研究与实现
2022-09-09程琴
程琴
(徐州工业职业技术学院 机电工程学院 江苏省徐州市 221140)
随着中国汽车产业的持续快速发展,据统计,2021年国内汽车保有量有3.02 亿辆,汽车的数量越来越多;车辆被盗案件也处于快速增长阶段,情况不容乐观。如今汽车防盗技术、汽车节能技术、汽车环保技术和汽车安全技术被列为今后汽车发展的四大方向。虽然目前国内的汽车防盗系统的研究与国外发达国家相比还存在一定差距,但随着我国汽车保有量的快速增长,汽车防盗系统必将迎来难得的发展机遇。当今传统的汽车定位防盗报警体系存在报警距离短,可靠性低,不能及时定位、跟踪、网络化和易于被破解等缺点。针对此现状,本文在研究GPS 卫星定位技术、SMS短消息技术和GPRS 无线网络技术的基础上设计研制一种基于云端的汽车定位防盗报警系统。
1 系统组成及工作原理
1.1 系统组成
系统主要由4 部分组成:车载部分、云端服务器、车主手机、卫星。主体是车载部分,车载部分主要由单片机、GPS 模块、GSM 模块、显示模块、稳压电路和其他外围辅助监控电路组成。系统总体方案如图1 所示。

图1 :系统总体方案
1.2 系统工作原理
车主一方面可以通过车载部分的显示器实时查看车辆的位置信息;另一方面车主通过手机向车载部分的GSM 模块远程发送信息,车载部分收到信息后,通过GPS 全球卫星定位系统实时获取车辆的具体位置信息,再通过GSM 全球移动通信网络将解调后的数据发送给车主手机,同时利用GPRS 网络将数据实时的上传至云端服务器,让身处任何地方的人都可以实时的了解汽车的位置,实现车辆的远程监控,而且云端服务器还可以实现数据长期保存。
2 硬件设计
2.1 单片机最小系统设计
单片机最小系统是整个系统的控制核心,选用STC12C5A60S2单片机作为主控制芯片,由于系统通过两个串口分别跟GPS 模块和GSM 模块进行数据传输,为了达到精确的数据传输,避免出现传输错误,采用外部晶体时钟,外部晶振采用11.0592MHz 的石英晶体。单片机最小系统的电路原理图如图2 所示。

图2 :单片机最小系统原理图
2.2 GPS定位设计
2.2.1 GPS 工作原理
GPS 工作原理主要是利用多个卫星和接收设备之间的空间距离,计算出接收设备的具体位置。但是由于卫星和接收设备间的时钟偏差或者其他误差,测量出的只是伪距,那么通过接收设备的卫星码和内部产生的复制码产生修正参数,再通过一系列计算,就可得出具体坐标。GPS 定位原理如图3 所示。
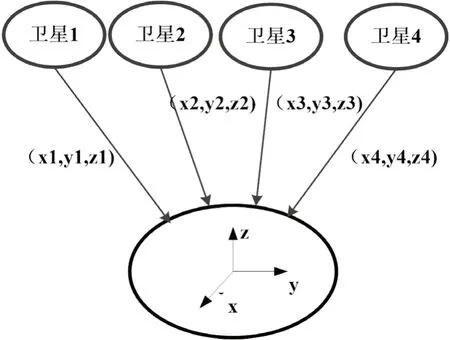
图3 :GPS 定位原理图
由于接收机的时钟偏差对于每个卫星都是相同的,所以可以通过以下公式计算得出接收设备的具体信息。

式中:
(x,y,z),(x,y,z),(x,y,z),(x,y,z)——表示卫星的已知位置;
d,d,d,d——表示测量的伪距;
c——表示电磁波速度;
dT,dT,dT,dT,——表示GPS 接收机时钟偏差项;
dt——表示卫星时钟偏差项,由接收机计算出。
2.2.2 GPS 模块电路设计
GPS 定位模块的作用是实时获取卫星传来的有效信息,并且解调接收数据,最终计算得出具体的坐标信息。本系统的定位模块采用ublox 公司生产的NEO-6M 模组。它搭载了50 通道的u-blox6 技术,分射频前端模块和基带处理模块两部分组成。射频前端模块主要是将GPS 射频信号转换成能被基带处理模块使用的中频信号,目的是能有效抑制外界的信号干扰,提高信噪比的电平。基带处理模块主要是对信号进行处理、解调,并且提取所需要的数据。
GPS 模块电路由串口通信信号匹配电路、EEPROM、稳压电路和UBLOX-6M 组成。GPS 模块的电源是3.3V,而STC12C5A60S2 单片机的电源电压为5V,直接将GPS模块的两个串口引脚跟单片机相连,会使GPS 模块烧坏。EEPROM 是为保存GPS 配置数据,选用24C02 芯片。稳压电路采用LM317 稳压芯片,将5V 电压转换成3.3V,给GPS 模块供电。UBLOX-6M 通过其射频前端模块,接收卫星信号,再通过其基带处理模块对接收到的卫星信号进行处理,最终以NMEA 格式的数据传输。
2.3 通信模块设计
通信模块采用基于SIM900A模块进行设计,通信模块系统框图如图4 所示。
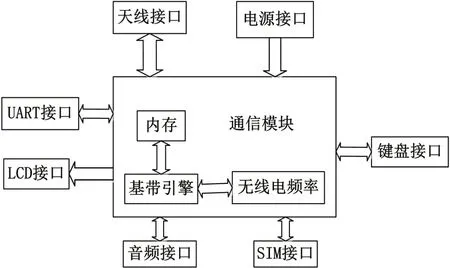
图4 :通信模块系统框图
通信模块的主要任务:一方面将数据转换成符合短消息业务的数据包,通过短消息的方式发送和接收,另一方面通过GPRS 网络将汽车的定位信息实时的上传至云端服务器,用于对数据的云端存储和手机APP 或网页查询。
本设计将单片机的串口1 与GSM 模块的TTL 接口相连。由于SIM900A 电源电压也是3.3V,所以在GSM 模块的RXD_O 和TXD_I 上再加一个与GPS 模块相同的串口通信匹配电路,实现与单片机信号的匹配。
2.4 系统电源设计
由于车载部分安装在汽车上,汽车蓄电池电压一般都为12V,而系统电压为5V,所以设计一个降压并且稳压的电源转换电路。采用XL4001 恒压恒流降压型直流电源变换器芯片,它可以输出稳定的电压,并且输出的电流最大能达到2A。输入输出端分别接两个电容,以达到除去高频和低频干扰的作用。肖特基二极管SS34 起到了稳压的作用。电源模块电路原理图如图5 所示。
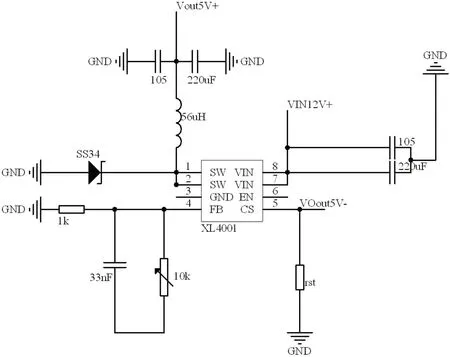
图5 :电源模块电路原理图
3 软件设计
3.1 车载终端软件设计
车载终端负责通过GPS 模块对汽车进行实时定位,通过GSM 模块接受车主的控制信号和传输汽车定位信息。系统主要有定位、防盗和报警三个功能。定位功能:GPS 模块通过单片机的串口2,将NMEA0813 格式的数据信息传输给单片机,单片机进行算法解析,提取坐标值,并且通过12864 显示屏显示。同时系统可以每隔一定的时间,将接收到的坐标值通过GPRS 网络上传至云端服务器,利用服务器的云存储功能对数据进行保存和实时调用,实现系统的实时定位功能。
防盗功能:车主向车载模块发送一条短信,GSM 接收到短信,单片机通过其串口1 接收到GSM 模块发来的返回数据指令,并且判断是否是收到短信指令。如果判断得出收到短信指令,单片机就会把发送定位坐标的AT 指令通过串口1 发送给GSM 模块,随后车载部分就向车主手机发送短信。实现防盗功能。
报警功能:当传感器感应到车身被破坏时,传感器信号传输给单片机,单片机确认车身被破坏后,通过串口1 向GSM 模块传送发送坐标短信的AT 指令,并且断开汽车油路。实现报警功能。
程序设计流程图如图6 所示。
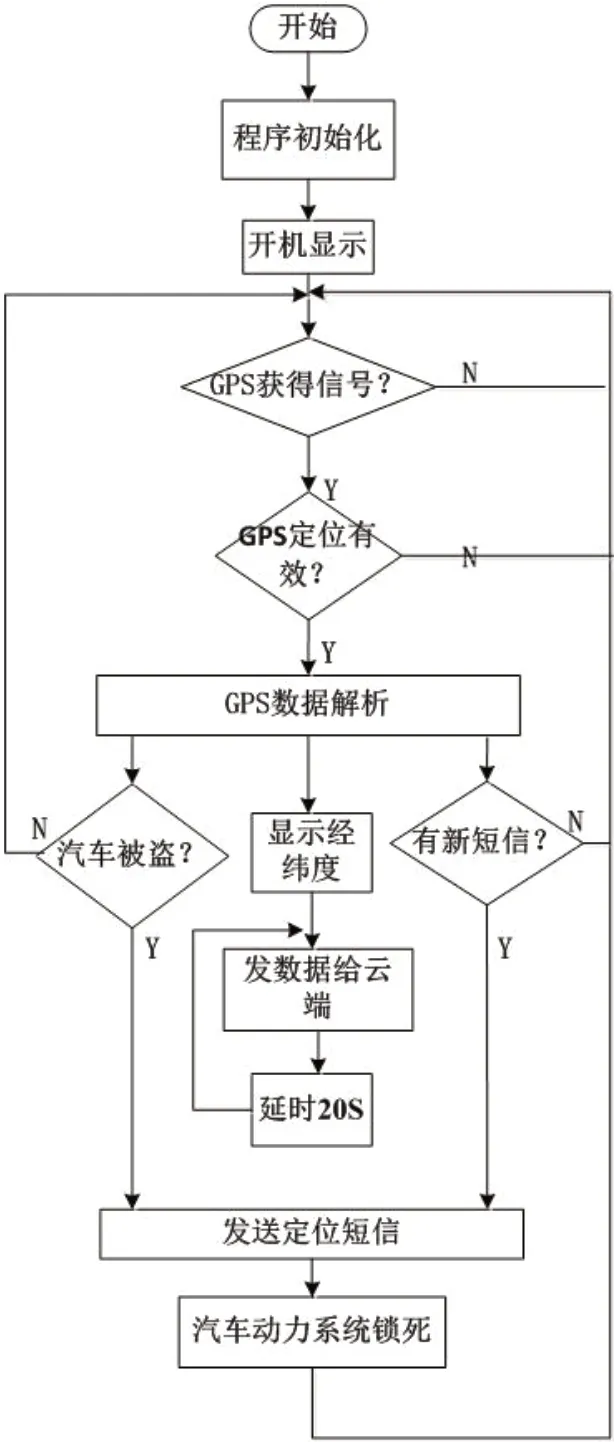
图6 :程序流程图
3.2 云端软件设计
服务器软件采用微软公司的面向对象的可视化程序设计语言Visual Basic进行开发。通过顶层的可视化控件进行外观、行为、字体和布局等设计,在底层的程序里面输入相应的代码来完成对整个软件的接口连接和运行。特别使用了Visual Basic 的用于TCP 和UDP 的网络访问Winsock 控件。服务器软件中的实时地图显示按钮可以用来调用在线网页。对于实时显示地图,使用Dreamweaver 软件设计开发在线网页,通过百度地图API 接口实时调用百度地图。
4 系统测试
系统统测试分为硬件测试和软件测试。硬件测试包括:GPS 模块测试、GSM 模块测试和单片机最小系统测试。软件测试包括:定位功能测试、防盗功能测试和报警功能测试。经软硬件分模块测试和系统整体测试,系统运行良好,实物测试如图7 所示。

图7 :系统测试
5 结论
面向云端的汽车定位防盗报警系统能够在车辆发生特殊情况时,将汽车的GPS 定位信息以短信的形式发送给车主,车主也可以对汽车进行监控和主动控制,同时系统还可以实时的将GPS 定位信息通过GPRS 网络上传至云端服务器,服务器可以对数据进行存储。用户可以通过网页或者手机APP 等任何移动终端查询到汽车实时位置,在车载的液晶显示屏上还可以实时显示汽车的位置信息。通过实验测试验证本系统定位精度高,可靠性强和可网络化,本设计弥补了传统汽车定位防盗报警系统的不足,成本低廉,便于推广,具有一定的实际应用价值。
