脉冲能量可控的高效率LED植物灯驱动电源设计
2022-09-07吴仁杰
程 敏,季 清,吴仁杰,韩 天
(苏州大学,江苏 苏州 215000)
引言
发光二极管(Light Emitting Diode,LED)作为第四代电光源,相对于过去的高压钠灯以及荧光灯等电光源,具有效率高、冷光源、光质纯、可调性高等优点,使得LED在各行各业都受到广泛关注与应用。
在植物种植行业,采用人工补光已经成为一种成熟的提高种植物产量以及品质的方法。LED的各种优点十分契合植物补光光源的要求:高效率的优点能够大量节约电能;冷光源的优点使得LED能够与种植物保持较近的距离,提高空间利用率;寿命长的优点保证补光光源不需要频繁替换,提高种植农场自动化程度;而光质纯与可调性高的优点使得补光光源发出的光质能够进行精确调控,针对不同种植物不同生长阶段的光照需求,可以调配出最优光照环境[1-3]。
植物生长的自然光照环境为连续光,因此在人工光照环境下通常采用连续光照为植物补光。近年来,光质生理学的研究者开始探究脉冲光对于植物生长的影响。目前有研究表明,脉冲光不仅不会降低植物的产量,反而可以促进植物的生长,并提高植物的光合荧光效率[4],而且采用脉冲光能够使得LED输出的光照更高效地被植物吸收,节约大量光照能量。
图1给出了采用脉冲光为植物补光时,LED光源的实际工作状态和理想电流波形。
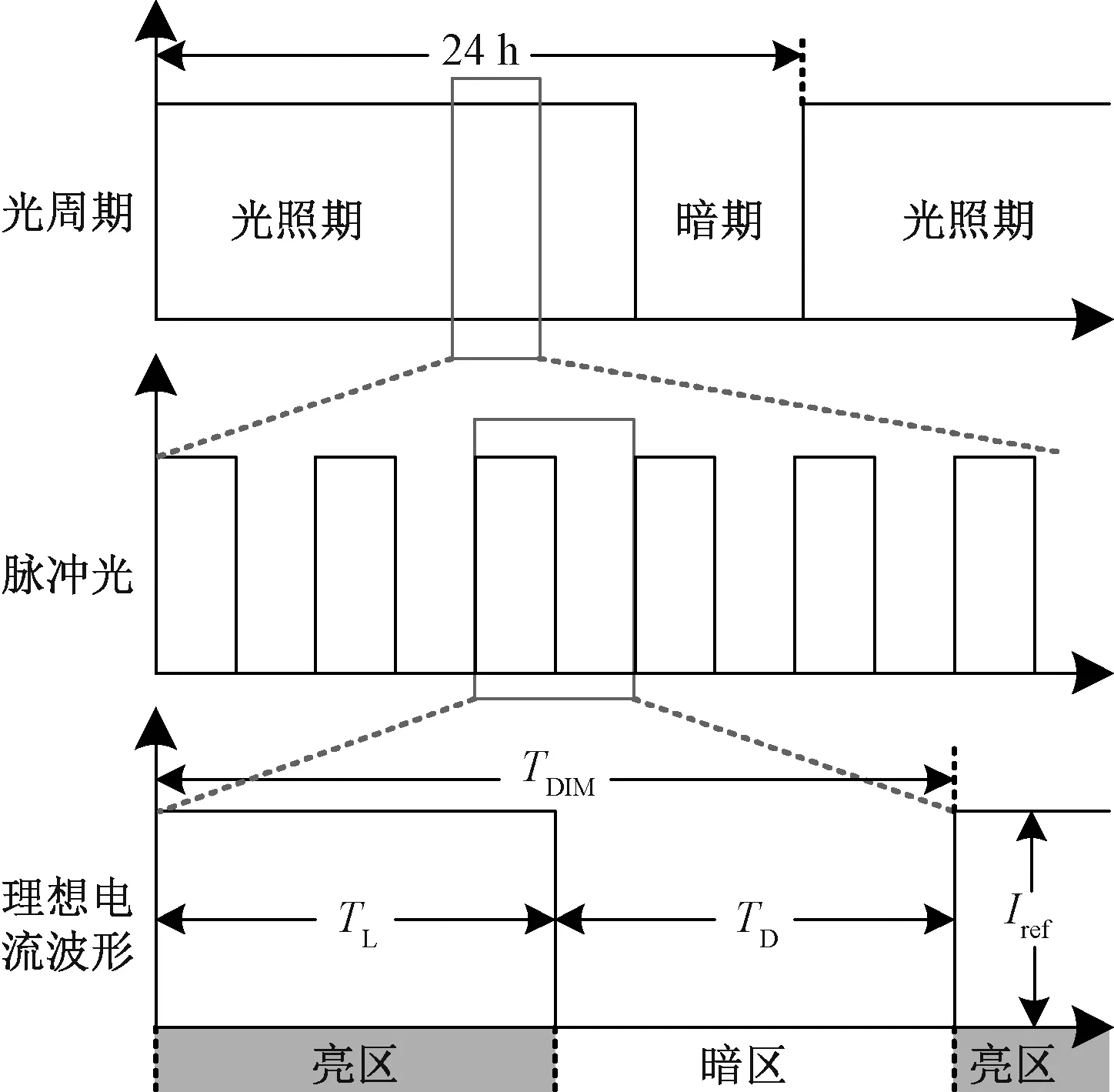
图1 脉冲光波形图Fig.1 Pulse light waveform
光周期通常以24 h为一个周期,对应自然光照期和暗期的生物节律。在光照期时,LED工作于间歇脉冲状态,以TDIM为脉冲周期,每个脉冲周期分为亮区与暗区,其中TL为亮区时间,TD为暗区时间。通过控制电流值Iref可以调节LED光源产生的瞬时光量子通量密度(Photosynthetic Photon Flux Density,PPFD)。
脉冲光的三个主要参数为脉冲光周期TDIM、脉冲光占空比DDIM以及脉冲光瞬时PPFD。由于不同植物所需的最佳脉冲光环境不同[5-7],如黄瓜处于脉冲光占空比为0.25时光合速率最高,而生菜最适宜的占空比为0.5,脉冲光周期对于不同植物也会产生不同效果。因此需要通过控制LED电流波形的TL、TD与Iref参数来修改TDIM、DDIM以及瞬时PPFD。
常见LED调光方式分为模拟调光与PWM调光[8,9]。模拟调光通过控制LED正向电压,调节LED电流,输出连续光照。PWM调光是通过将调光开关与LED串联或并联,使用PWM信号驱动调光开关,改变PWM信号的占空比调节LED驱动电流的平均值,LED实际工作于脉冲状态。图2(a)和2(b)分别给出了调光开关Q与LED串联和并联的结构简图[10,11]。

图2 PWM调光结构简图Fig.2 PWM dimming structure diagram
图2采用的PWM调光方式不能直接调节脉冲电流的瞬时值Iref,需要额外调节前级驱动电源的VOUT或IOUT。本文采用单管Buck电路直接驱动LED,在亮区控制Buck电路开关管的占空比,调节电流瞬时值Iref,在暗区关闭开关管,保证脉冲电流的精准调节,同时减少驱动器成本。
采用Buck电路直接驱动LED输出脉冲光时,Buck电路实际工作于亮区和暗区的切换状态,需要电路具有较高的动态性能。文献[12]提出的脉冲序列(Pulse Train,PT)控制能够改善切换状态的动态性能,提高LED驱动电流的响应速度。但PT控制主要针对DCM(Discontinuous Conduction Mode)状态,在CCM(Continuous Conduction Mode)状态下则会存在纹波较大、启动存在较大过冲、输出功率可调范围小等问题[13]。文献[14]基于PT控制提出双缘调制脉冲序列(Dual Edge Modulation Pulse Train,DEMPT),分别对高低能量脉冲采用前缘和后缘调制以抑制纹波和启动过冲,且不会影响动态性能。DEMPT控制方式虽然能够抑制PT控制启动过冲,但相对于PID控制,在稳态下的输出纹波依旧较大。且由于预设不同能级的脉冲无法改变,输出电压的可调范围受限。
本文通过将DEMPT控制与PID控制相结合,提出一种DEMPT-PID控制方式,缩短输出LED电流的上升时间,以此提高脉冲光周期以及占空比可调范围,同时通过将控制模式切换为PID控制,以消除DEMPT控制带来的低频振荡,提高LED电流的稳定性,减小电流纹波。
1 工作原理分析
图3给出了以单管Buck实现的LED脉冲驱动电路,其中负载LED等效为二极管、稳压直流源和电阻串联的近似线性模型[15]。

图3 Buck电路拓扑图Fig.3 Buck circuit topology
Buck电路在脉冲亮区采用恒流驱动,R1为电流采样电阻,通过反馈R1的电压,通过换算可以获得LED电流值。VIN为电路直流输入,Q为开关管,C为输出滤波电容,L为滤波电感,D为续流二极管,DLED为等效二极管,VF为等效直流源,RLED为等效电阻。使用DSP(Digital Signal Processing)作为控制核心,根据反馈信号调节开关驱动PWM。DSP依据亮区和暗区的预设值,在亮区开启驱动信号,在暗区关闭驱动信号。
图4给出了亮区和暗区的实际电流和开关驱动PWM波形。其中,TSW为PWM的周期,对应频率为fSW,对应占空比为DSW。通过调节DSW可以调控Buck电路输出电流iLED,从而控制LED在亮区产生的瞬时PPFD。TL与TD分别为亮区与暗区时间,对应调节脉冲光周期TDIM与占空比DDIM。
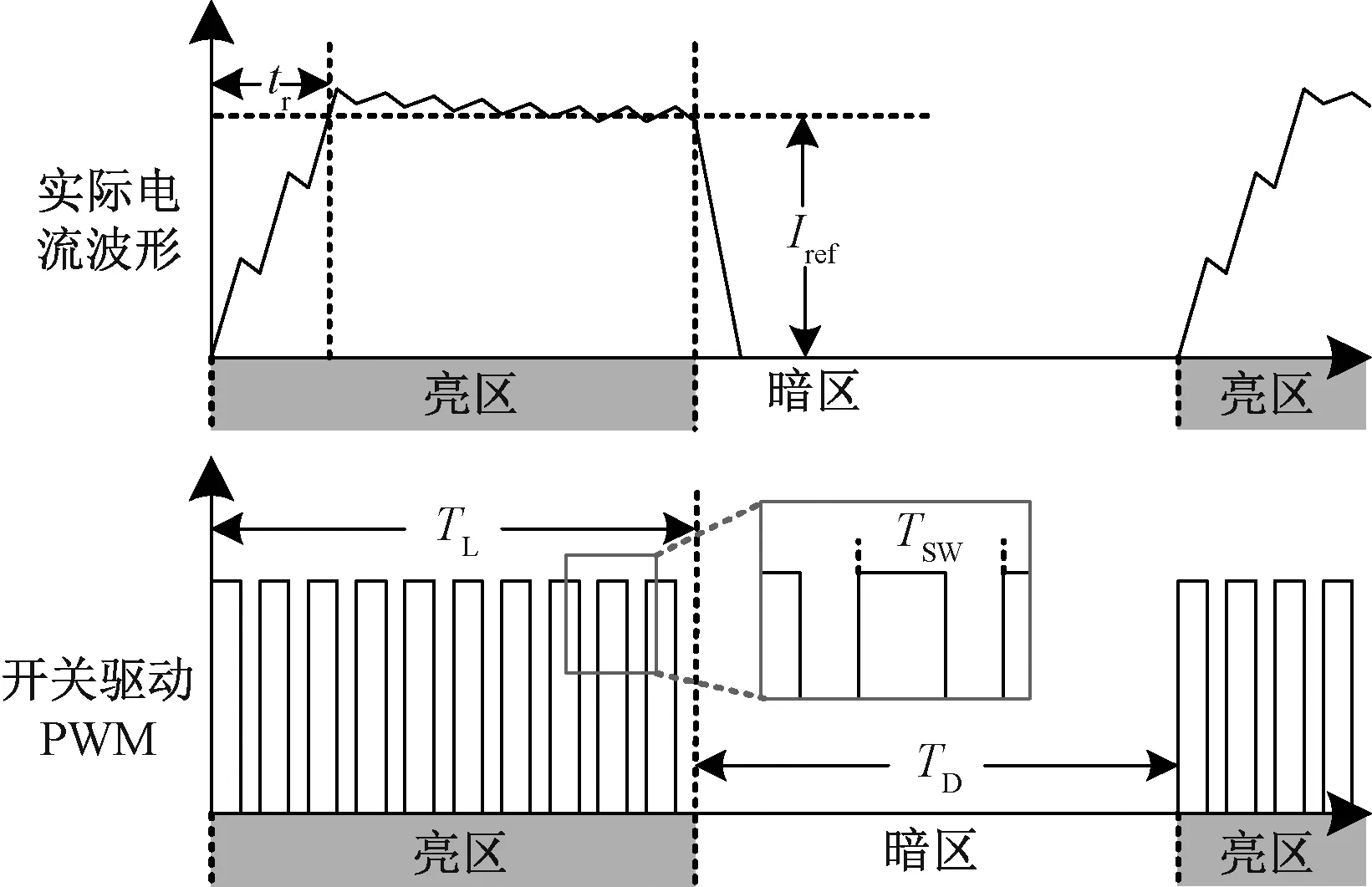
图4 PWM波形与实际电流波形Fig.4 PWM waveform and actual current waveform
在进入亮区时,Buck电路输出电流存在上升时间tr,若TL小于tr,输出电流还未稳定便切换至暗区,电路无法正常工作。为了提高输出脉冲光频率fDIM的可调范围,需要缩短上升时间tr。同时,为了保证亮区光照强度的稳定性,应抑制LED进入亮区时的电流过冲、减小稳态纹波。
2 PT控制与DEMPT控制原理
Buck电路工作于恒流输出的稳态时,通常采用PID控制来对开关管驱动波形进行调节,然而PID控制对于脉冲切换状态下的Buck电路而言,无法同时获得良好的动态响应速度和鲁棒性。PT控制是一种非线性控制,预设两个占空比参数,即占空比高的脉冲序列为PH,占空比为DH,占空比低的脉冲序列为PL,占空比为DL。当反馈信号小于目标参数时,发出PH脉冲,大于目标参数则发出PL脉冲,开关驱动占空比为:
(1)
若开关管在一个开关周期内先导通再关断,则调制方式为后缘调制,反之为前缘调制。在PT控制中,对高占空比脉冲PH使用后缘调制,对低占空比脉冲PL使用前缘调制,这种控制方式称为双缘调制脉冲序列(DEMPT)控制,图5给出了采用后缘调制PT控制与DEMPT控制启动电路波形。

图5 后缘调制PT控制与DEMPT控制启动波形图Fig.5 Start waveform diagram of trailing edge modulation PT control and DEMPT control
由于DEMPT控制对误差能够进行快速调节,因此采用DEMPT控制可以有效降低PT控制启动电路时带来的过冲。
但DEMPT控制在稳态时由于占空比切换,依旧会产生较大的纹波,影响LED发光质量。稳态下的DEMPT控制纹波最小的状态为脉冲序列以1PH-1PL的方式组合,此时的纹波大小为:

(2)
采用PID控制的Buck电路稳态纹波大小为:

(3)
由式(2)与式(3)可以得出,PID控制的稳态纹波小于DEMPT控制纹波。
本文将DEMPT控制与PID控制相结合,通过在Buck电路启动时采用DEMPT控制,进入稳态后切换至PID控制,即DEMPT-PID控制方式。
3 DEMPT-PID控制工作原理
图6给出了DEMPT-PID的控制过程,其中Iref为目标电流参考值,Imref为允许的输出电流过冲值。

图6 DEMPT-PID控制波形原理图Fig.6 Schematic diagram of DEMPT-PID control waveform
设定亮区起始点时间为t=0,进入亮区时,先采用DEMPT模式进行控制,缩短iLED的上升时间并抑制过冲。t=TST时,切换为PID控制模式,稳定输出电流。在DEMPT模式下,将电流采样点设定为开关周期结束的时刻。t=TST时,为了消除高频纹波带来的反馈干扰,PID模式下采样点切换为开关管导通一半的时刻。
需要调节目标电流值Iref以应对不同植物在不同生长阶段的光照需求时,所对应最优控制DEMPT控制参数与模式切换时间TST不同,因此高占空比DH、低占空比DL和模式切换时间TST不能选取固定值。
本文采用了一种自适应调节参数的控制方法,TST参数可以根据输出电流状态自动调节,并且根据输出电流iLED的上升时间tr与电流过冲值imax自动调节DH与DL,从而既能缩短上升时间,又能够一定程度抑制过冲。
LED工作状态为周期性的亮区和暗区切换,因此可以根据上一调光周期的工作状态来修改当前调光周期的控制参数。
DH的取值:DH决定上升时间tr,通过将上一周期亮区脉冲的tr作为反馈量与目标上升时间Tref进行计算,对当前周期DH调节,如式(4)所示。
DL的取值:DL用来抑制电路进入亮区输出过冲,可以比较上一周期的输出电流过冲值imax与目标输出电流过冲值Imref,对当前周期的DL进行调节,如式(5)所示。
DH(N+1)=k(tr(N)-Tref)+DH(N)
(4)
DL(N+1)=m(Imref-imax(N))+DL(N)
(5)
其中DH(N)、DL(N)、DH(N+1)、DL(N+1)分别为第N个周期和N+1个周期的DH和DL。Tref为目标上升时间,tr(N)为第N个周期的上升时间,k为上升时间误差的增益系数。Imref为目标输出电流过冲值,imax(N)为第N个周期的输出电流过冲值,m为电流过冲值误差增益系数。
图7为第N个周期与第N+x个周期的波形示意图以及参数变化。在第N个周期中,上升时间tr(N)大于目标上升时间Tref,根据式(4),DH(N+1)会增加;电流过冲值imax(N)大于目标过冲值Imref,根据式(5),DL(N+1)会减小。在经过x个周期后,tr(N+x)与imax(N+x)满足要求,系统达到稳定。

图7 参数变化示意图Fig.7 Schematic diagram of parameter change
TST的取值:由于DEMPT控制需要完成两个目标,缩短上升时间与抑制过冲。因此DEMPT控制切换至PID控制需要满足两个条件:
(1)DEMPT模式输出脉冲为低功率PL,表明PH脉冲已完成上升阶段;
(2)输出LED电流iLED小于参考电流Iref,表明PL脉冲已完成过冲抑制。
在图7的DEMPT模式下,每个开关周期结束节点都会根据上述条件,判断是否切换为PID控制。
在切换为PID控制模式后,为了使输出电流尽快达到稳态,同时减小切换过程中的纹波,需要合理选定PID模式的占空比初值DM。
DM的取值:在PID控制Buck电路稳态状态下,每个开关周期响应都可分为由稳态占空比控制的零状态响应与由电感电流iL和输出电容电压vC决定的零输入响应。通过将上一周期的稳态占空比赋值给DM,可以使得PID电路状态更接近稳态电路状态,减小输出纹波。
图8给出了PID控制起始占空比DM分别为稳态占空比、DH与DL的波形仿真图。
在图8中,读取上一周期稳态占空比为0.55,DH为0.75,DL为0.37,分别带入至DM中。可以看出无论是选取DL或DH,都会由于PID控制的滞后性产生较高的振荡。而采用稳态占空比则能够较快进入稳态,不会产生较大纹波。
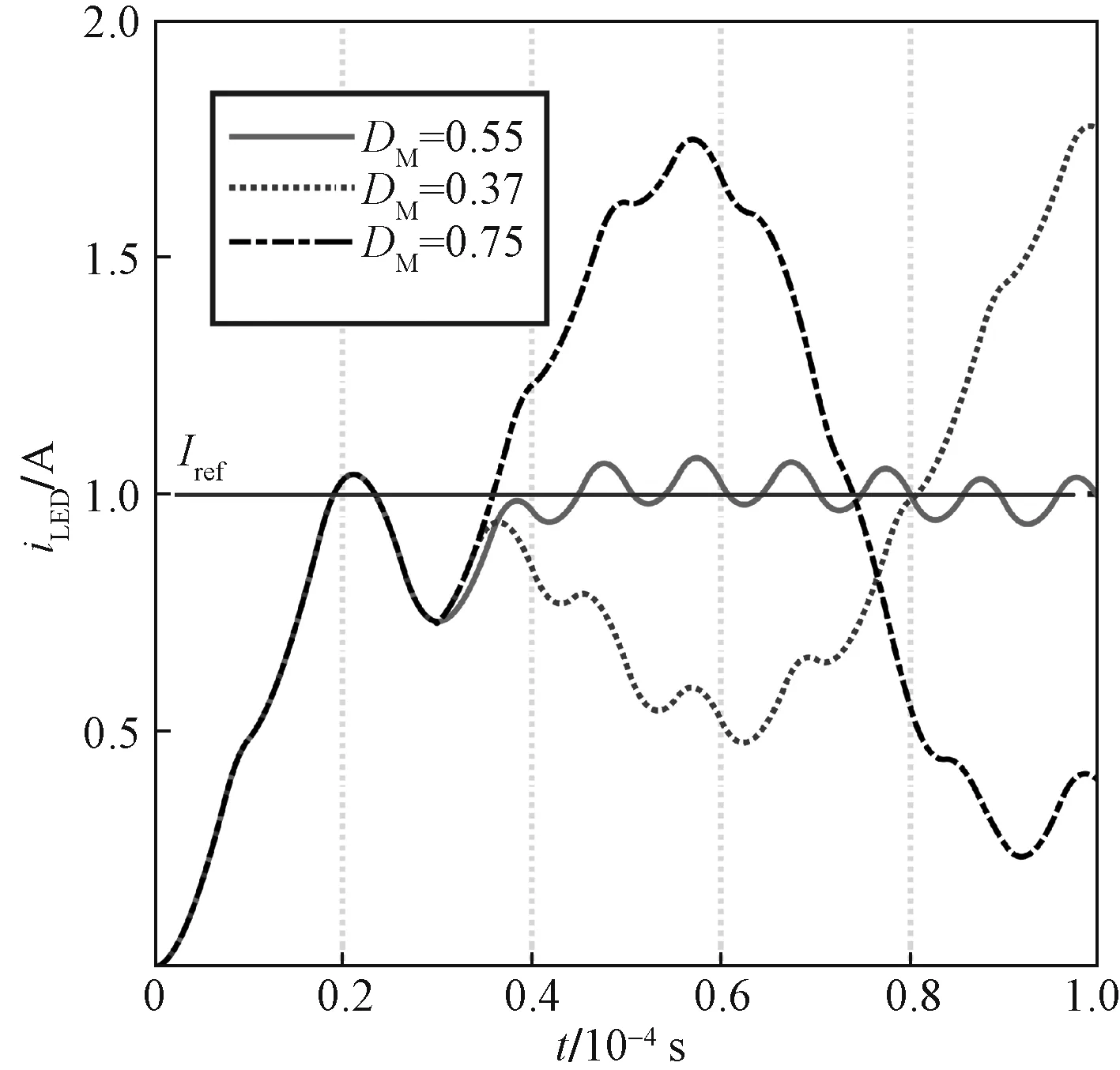
图8 不同DM取值仿真图Fig.8 Simulation diagram of different DM values
此外考虑到LED的温漂现象,LED的伏安特性会随温度变化,相应的稳态占空比也会改变,因此DM不可选定固定值,通过每个周期读取上一周期的稳态占空比,可以有效避免因LED伏安特性变化带来的电路状态不稳定。
图9给出了DEMPT-PID的控制程序流程图。
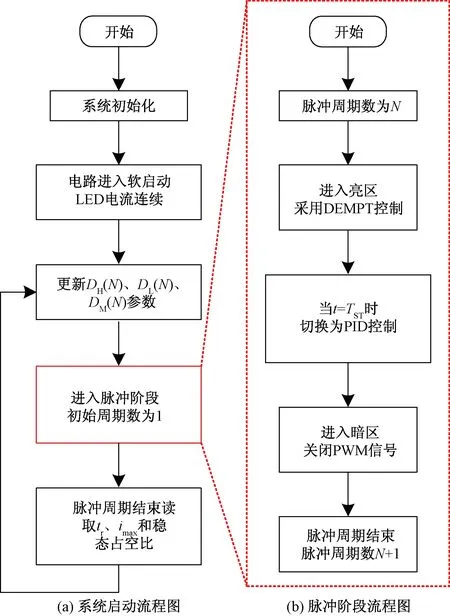
图9 控制程序流程图Fig.9 Flow chart of control procedure
控制流程图可以分为系统启动流程与脉冲调光流程,如图9(a)和9(b)所示。当LED驱动系统启动时,首先采用软启动来抑制系统启动时产生的过冲,并在系统稳定后获取初始的稳态占空比。在软启动过程中,占空比DSW缓慢上升,直至输出电流iLED达到目标电流值Iref,在此阶段LED输出连续光。当软启动结束后,读取稳态占空比,带入至DM(1)、DH(1)与DL(1),进入脉冲调光阶段。每个脉冲光脉冲周期都会运行一次参数调节,根据此周期对应的DH与DL参数进行DEMPT控制,直到TST时间节点切换为PID控制。PID控制下的起始占空比为此周期对应稳态占空比的DM,通过PID调节使得输出电流稳定,并在电路进入稳定后读取此周期的稳态占空比。当亮区时间结束时,驱动器进入暗区状态。此时控制器关闭PWM输出,使LED电流下降为0。
在每次脉冲调光结束后,每个调光周期根据本周期上升时间tr以及电流过冲值imax计算出下一周期的DH和DL,并更新DM数值。
采用Simulink进行仿真验证,设定RLED=2.4 Ω、VF=10.8 V、VIN=24 V、L=100μH、C2=1 μF、TSW=5 μs、TDIM=100 μs、DDIM=0.5、k=1000、m=0.1、Iref=1 A、Imref=1.1 A、Tref=15 μs。
图10为DEMPT-PID控制参数DH与DL的变化。横轴N为周期数,在同一周期内DH与DL不会改变。周期N=1时DH与DL值等于通过电路软启动读取的稳态占空比DM,读取稳态值为0.57。然后在每个调光周期读取tr与imax,并对DH与DL进行调节。仿真在第26个周期时达到稳态,此时采样的上升时间tr(26)为15μs,最大电流值imax(26)为1.087 A,DH(26)为0.805,DL(26)为0.42。

图10 DEMPT参数变化图Fig.10 DEMPT parameter variation diagram
波形变化时序图如图11(a)所示,第1、10、20、26周期输出电流波形如图11(b)所示。
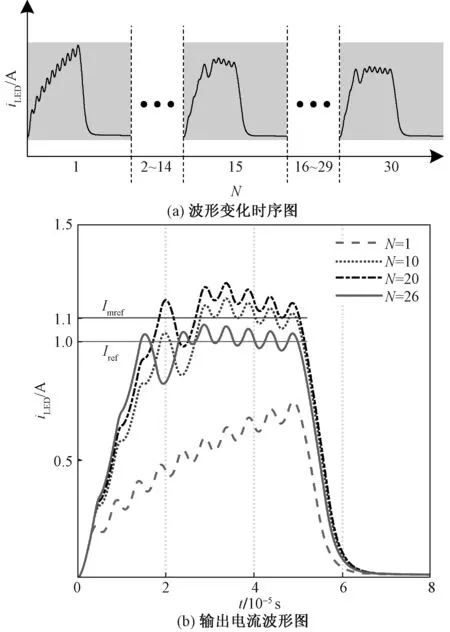
图11 DEMPT-PID控制仿真图Fig.11 Simulation diagram of DEMPT-PID control
在第1个周期内DEMPT模式采用的是10PH-0PL序列组合,随着DH与DL的调节,DEMPT控制下的脉冲序列逐渐变为了第10周期的4PH-1PL组合、第20周期的4PH-1PL组合以及稳态的第26周期的3PH-1PL组合。根据第26周期的电流波形可以看出,上升时间tr满足Tref要求,电流最大值imax满足Imref要求。在输出电流具有较快上升速度的同时,不会产生较大过冲。
通过修改增益参数k与m可以缩短电路达到稳定所需周期,但过大的增益参数可能会导致DH与DL参数出现稳态振荡,影响电路输出电流性能。
4 实验验证
为了验证上述DEMPT-PID控制方案的可行性,搭建了采用Buck驱动电路的实验样机,主要参数见表1。
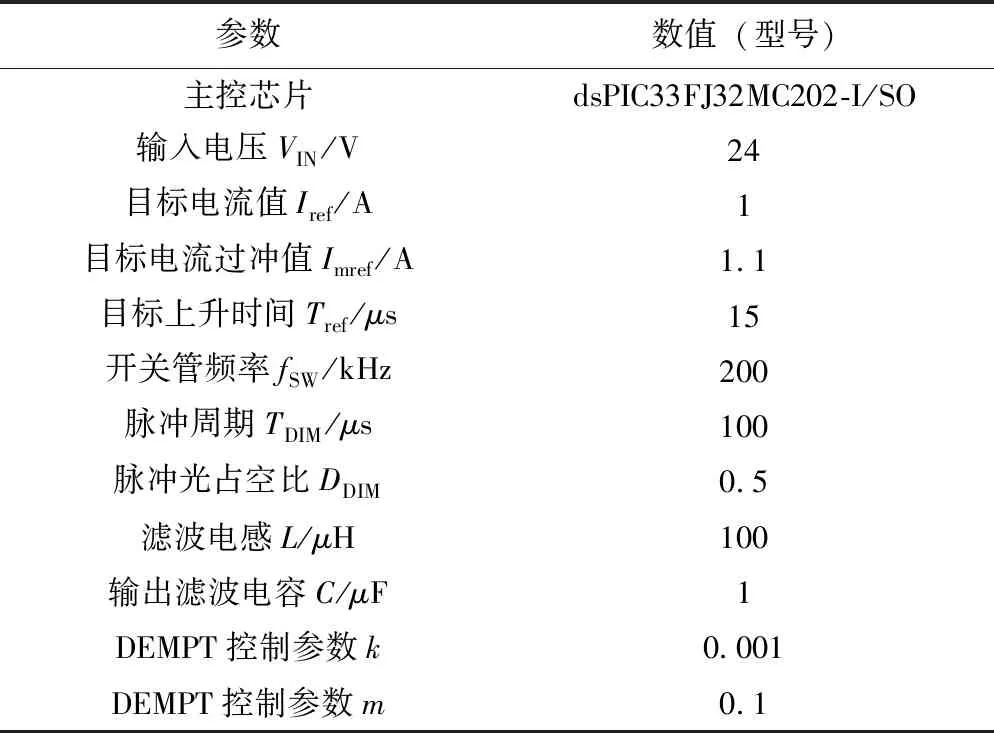
表1 调光驱动器参数Table 1 The parameters of the dimming driver
图12~图14分别为采用PID控制、PT-PID控制、DEMPT-PID控制输出电流波形和开关管vgs波形。其中PT-PID控制采用与DEMPT-PID相同的控制逻辑。

图12 PID控制波形图Fig.12 PID control waveform
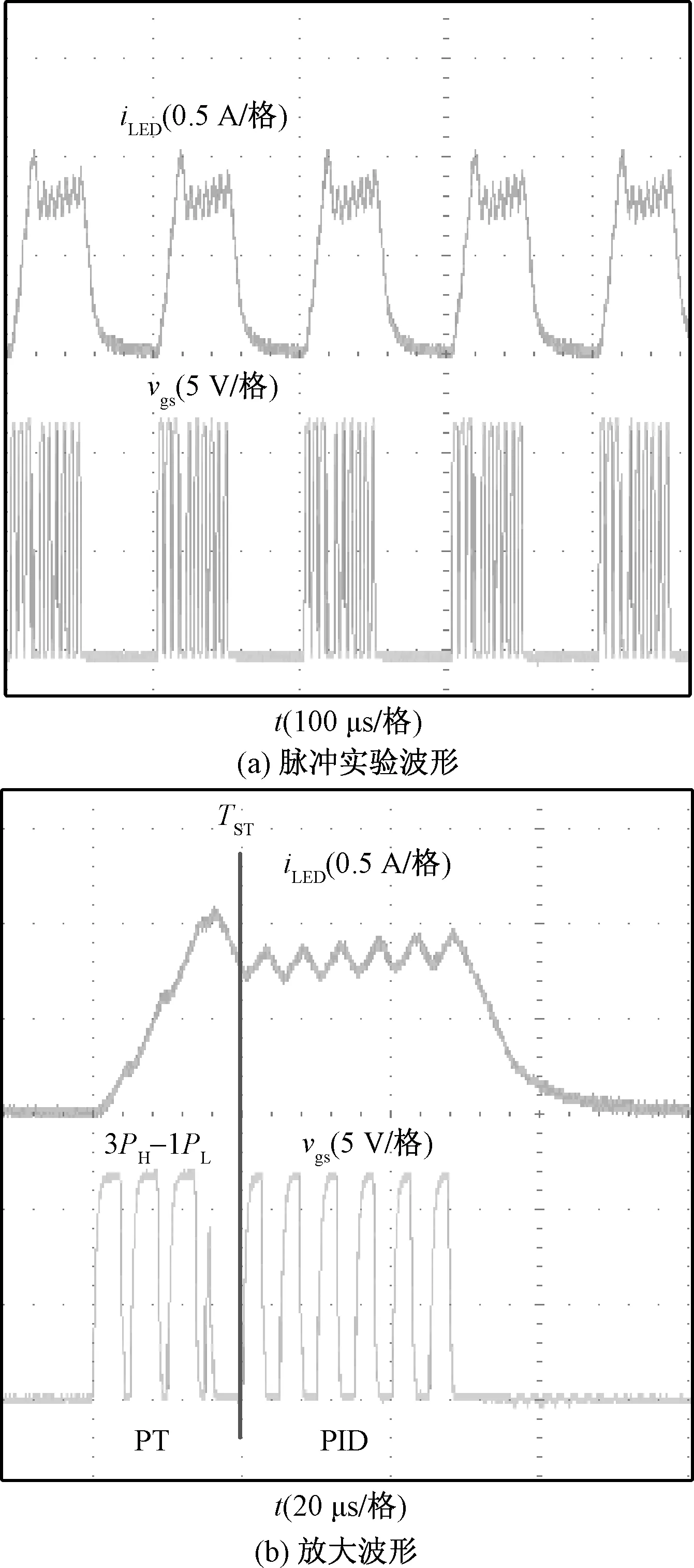
图13 PT-PID控制波形图Fig.13 PT-PID control waveform
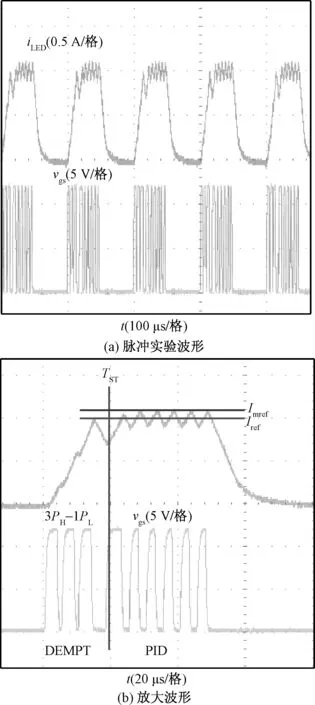
图14 DEMPT-PID控制波形图Fig.14 DEMPT-PID control waveform
可以看出,PID控制模式下上升时间tr为24 μs,imax为1.61 A。PT-PID控制模式下上升时间tr为19 μs,imax为1.1 A。DEMPT-PID控制模式下上升时间tr为15 μs,imax为1.1 A。在上升时间tr的优化上,PT-PID控制与DEMPT-PID控制更容易达到设定的要求时间Tref。而PID控制不仅较难满足上升时间要求,且会产生较大过冲,在较短时间内较难进入稳定。
在过冲值imax的优化上,PT-PID控制当满足了过冲大小时,会导致输出电流减小。而DEMPT-PID控制则能够在满足上升时间的要求下,同时抑制过冲,产生较为理想的输出电流波形,实验结果也基本与仿真一致。
5 结论
本文基于Buck电路设计了一种脉冲能量可控的高效率LED植物灯驱动电源,能够单独调节输出脉冲光的瞬时光照强度、脉冲频率以及脉冲占空比,可调脉冲频率最大为10 kHz。同时提出了DEMPT-PID的控制模式,在满足输出电流上升时间的基础上,抑制了过冲,并通过切换到PID控制模式以避免DEMPT模式在稳态所产生的低频纹波的影响。最后设计了实验样机进行了验证,证明了此控制模式的可行性以及稳定性。对于植物种植行业中植物照明能源节约方面具有一定促进作用。
