无传感器永磁同步电机的位置辨识与控制研究
2022-09-07刘道宽余岳
刘道宽,余岳
湖南工业大学,湖南株洲,412007
0 引言
随着我国社会各方面的发展进步,人们的生产生活需求越来越复杂化,使得各种类型的电机被不断设计制造应用于人们的生产生活中。在工业领域以及人们日常生产中常用的电机类型有永磁电机、步进电机以及直线电机等。在诸多类型的电机中,永磁同步电机由于其体积小、重量轻的特点在我国各领域被广泛应用,而且发挥着极其重要的作用。随着各项技术的发展进步,永磁同步电机在制造过程中各项性能都有所提升,但是相对于应用过程中对其性能的需求还是有所欠缺。在永磁同步电机的发展中,大多数研发者以及用户都将降低控制系统的成本作为当前的发展目标,并且有很多学者对于永磁同步电机的控制提出了各种方式和策略,取得了一定的成果。在永磁同步电机的发展中,转子位置的获取是非常关键的问题之一,以往的检测方式是通过传感器技术实现的,例如应用较多的霍尔传感器以及相应的光电编码器等机械传感器系统,但是在应用过程中存在一定的问题。为了避免传感器系统应用过程中存在的各种问题,本文对无传感器的永磁同步电机控制进行了简单的介绍,旨在提升永磁同步电机的动态控制性能。
1 永磁同步电机的控制策略
1.1 恒压频比控制
同步电机在运行的过程中,其转速与电机定子电流的关系为固定的比值,在永磁同步电机转速调节控制的过程中,通常采取的措施是调节电机输入侧的电压频率。电机运行效率的关键是其气隙磁通是否能够保持在恒定的值,若电机的气隙磁通能够维持在特定的值,则电机的效率就能处在最高状态下且不会使磁路处于饱和状态[1]。之所以称之为恒压频比控制就是要使电机定子端的电压与其定子侧的供电频率的比值始终保持为一个不变的常数,体现在实际运行中就是要保持基频状态下的气隙磁通保持恒定不变值。若要在高于基频频率的状态下进行调速,从额定供电频率往上就会有一定的提升,但是由于电机运行的逆变器通常对输出电压有一定的要求,所以端电压的值最高只能稳定在额定电压的状态下,造成的结果就是电机的气隙磁通以及运转频率反向降低。此类控制方式无法对电机的转矩进行有效的控制,在当前电机的控制中已经很少应用。
1.2 直接转矩控制
直接转矩控制是通过控制电机的电磁转矩从而实现电机转速以及位置的控制。在同步电机的逆变器上施加一定的电压能够在一定程度上改变电机的转矩,使其相应地增大或者减小,电机的气隙磁链也会发生相应的变化。不含电流环是同步电机直接转矩控制的特性,所在实际控制中也不需要坐标变换的环节,在普通三相静止的坐标系中就能够进行正常的控制[2]。在目前的应用中,直接转矩控制已经被广泛应用于永磁同步电机的调速系统中。但是在应用过程中发现,此控制方法应用在电机运行过程中,会使电机转矩以及磁链发生明显的波动,而且由于没有电流闭环,所以需要考虑电机过流的问题。
1.3 神经网络控制
神经网络控制是现在控制体系中应用较为广泛的控制方法,其控制方式能够很好地解决控制条件较为复杂的控制过程,例如在生产过程中常见的非线性控制系统或者一些不确定的控制系统,神经控制系统都能够起到良好的作用。在传统的电机控制体系中,通常都是在电机数学模型的基础上进行数字推导从而制定电机的控制方案。但是神经网络控制在同步电机的应用中打破了传统意义上的控制过程,其控制方式具有较强的鲁棒性,能够有效避免一些电机参数对控制效果的影响。由于神经网络的控制体系较为复杂,所以在实际运行过程中,需要进行大量的计算,这就导致对电机的控制芯片以及各种控制电路的要求相对较高,成本相对来说也较高,但是神经网络控制在当前的发展中仍然有很大的提升空间。
1.4 永磁同步电机无传感器控制
随着电力电子技术的进步,电力电子技术在永磁同步电机领域的应用越来越广泛。由于传感器控制的电机在某种工业环境下的应用存在一定的局限性,所以无传感器控制的技术成为当前永磁同步电机控制的关键领域。此控制方式的关键就是不采用传统意义上的传感器,而是通过计算机算法的应用来估算电机转子的位置以及转速。对于电机的不同转速,永磁同步电机通常需要采取不同的控制方式,而控制方式的选择主要取决于电机的反电动势以及相应的转速之间额关系,在测量电机转子相应信息的过程中,反电动势是其必要的条件之一。在电机启动时,或者转子以较低的速度运行时,电动势的值会非常小,计算机在提取相应信息的过程中就会很艰难,所以在这种情况下,就需要通过利用控制算法来增强信息提取的效果。通常无传感器电机在不同转速下有着不同效果,其控制方式通常有以下几种。
(1)高频注入法。永磁同步电机由于自身磁钢安装方式的不同,会使自身的凸极效应存在很大的差别。若是永磁同步电机的磁钢安装在电机的内部,这种情况电机的d轴以及q轴的电感大小不一,电机d轴的电感小于q轴的电感。由于d、q轴的电感大小不一,所以电机本身就会具有凸极效应,能够测得需要的变量信息[3]。但是如果磁钢安装在电机的表面,就会使得电机的d、q轴存在同样大小的电感,从而造成电机自身不能够产生凸极效应,在这种情况下就需要利用其他的算法促使其产生凸极效应,为变化量的求解奠定基础。高频注入法是在电机自身或者人为通过一定的方法使其产生凸极效应,与电机自身的其他要素没有关系,在实际应用中,高频信号注入法分为旋转高频注入以及脉振高频注入两种方式。
(2)直接计算法。直接计算法的特点是实施的过程相对较为简单,动态响应的速度较快。直接计算法的原理就是利用永磁同步电机定子端电压与电流的关系,从而计算出电机转子的位置以及相应时间的转速。
(3)扩展卡尔曼滤波法。扩展卡尔曼滤波法在非线性系统的控制中应用非常广泛,而且其在应用过程中能够在一定程度上抑制系统中存在的误差,计算的精度相对较高,但是在实时性方面就存在一定的欠缺。
2 滑模变结构控制原理
2.1 滑模变控制原理分析
永磁同步电机实现无传感器控制主要是建立在滑模变结构控制原理的基础上,实现对电机位置以及转速的控制,有着较强的鲁棒性。
在滑模变控制理论的基础上,我们分析滑动模态的定义以及其数学表达式,通常情况下,在滑模变控制系统中,有:

在公式(1)里有s(x)=s(x1,x2,…xn),从而使得状态空间分为两部分,分别为s>0与s<0两部分,三种情况的分布如图1所示。
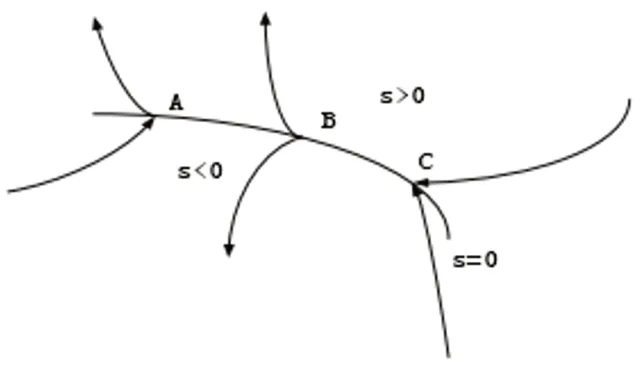
图1 情况分布图
对于以上三种情况,A点为通常点,B点为起始点,C点为终止点,对于A点来说,当运动点到达s=0的情况下,则会穿过;对于B点来说,当运动点到达s=0的情况下,则会从两侧离开;对于C点来说,当运动点到达s=0的情况下,会从两边运动到该点
在实际滑模控制中,对于前两种情况下并没有什么实际的意义,最关键的就是第三种情况。在实际控制过程中,如果所有的点都会运动到第三种情况下,就会停留在C点附近运动。所以,通常切换面s=0都是终止点的空间,通常成为滑动模态区域,在这一区间内的运动称为滑模运动。
在点运动的过程中,若点在s=0的附近,可以通过以下数学表达式进行表示:

或者可以将以上表达式表示为:

对以上的表达式的约束下会对滑模控制提出李雅普诺夫函数的必要条件,有以下的表达式:

上述式子是正定的,在上述约束条件的限制下,s2在求导后得到的导数通常为负半定的情况,所以在s=0的附近v函数通常是一个单调递减函数或者是函数值维持不变,在满足上述条件约束的情况下,系统通常会稳定在s=0的状态下。
对于滑模变控制阶段的定义,我们可以通过以下的方式进行定义,首先假设:

以数学表达式进行切换函数的表示为:

控制规律的数学表达式为:

在永磁同步电机的滑模变控制中,若满足以上条件,理论上能够实现电机的滑模控制,在永磁同步点击滑模变控制过程中,s(x)与u(x)的选择是保证运动点是否能够快速进入滑模面的关键,对永磁同步点击的控制性能的提升非常重要。
2.2 滑模变结构控制的抖振问题
在通过滑模变结构控制电机运转的过程中,通常情况下外界环境的变化或者电机运行参数的调整并不会对控制系统产生较大的影响,抗干扰以及自我恢复能力较强。滑模变控制结构导致电机抖振是因为滑模变控制结构并不采用连续的函数以及受电机开关特性的影响,当电机处于高速运行的状况下,则会发生抖振现象。抖振现象的存在会在一定程度上影响控制的稳定性。但若采取相应的方法消除抖振现象则会影响系统的抗扰动能力,所以电机在运行过程中不可能完全消除谐振现象,只能通过其他方法尽可能减小抖振现象对电机控制的影响。在电机运行过程中,造成抖振现象产生的原因有以下几方面。
(1)时间滞后开关。对于图1中s(x)的分布情况,在s(x)附近,开关函数会存在时间滞后的情况,控制状态的实时变化也会由于开关的时间滞后而存在延迟。
(2)空间滞后开关。和时间滞后开关相似,空间滞后开关在空间状态上存在一定的滞后情况,开关在空间状态上的滞后会使得空间里存在相应变量的死区。
(3)系统惯量的影响。滑模结构控制的运动,在实际运行过程中由于加速度的加速幅度是有一定限制的,同样也会使得切换过程存在一定的滞后情况。
(4)离散系统本身的因素导致抖振。滑模结构控制在正常情况下,切换动作都会发生在图1中的s(x)面上,但是由于离散系统滑动模态并不是非常标准,所以就可能导致切换动作并没有在切换面上,从而导致产生衰减形式的抖振现象。
以上几种情况都会在一定程度上导致抖振现象的产生,但是在计算机技术不断发展应用的前提下,其不断提升的计算能力能够将在时间及空间上滞后的情况在一定程度上减弱。另外两种因素是由切换过程中造成的抖振现象导致的,而加强切换动作的连续性能够提升控制效果。
3 永磁同步电机无传感器复合控制
滑模变结构控制永磁同步电机的运行具有良好的鲁棒性,但是滑模变结构通常应用在电机处于高速运转的情况下;对于电机处于静止或者转速较低的情况下时,电机的反电动势通常很小,甚至为零,就会导致无法精确估算转子的位置,此方法则不适用。

3.1 脉振高频电压注入法控制原理

图2 高频注入转子位置估算控制框图
向d轴注入的高频电压信号用数学表达式可以表示为:


实际位置角θ、位置估算角θ1与差值的关系如图3所示。

图3 各坐标关系图
3.2 永磁同步电机位置辨识
永磁同步电机的转速范围相对较宽,为了能够在宽转速范围内实现有效控制[5],需要结合电机高转速情况下的滑模控制算法,通过加权系数法实现不同方法之间的有效切换,加权系数法如图4所示。图中所示的K1、K2分别表示不同估算速度下的加权系数,ω1、ω2分别表示不同切换方法的临界速度。当ω<ω1时,电机处于低速运行的状态,需要通过高频注入信号来测量电机转子的位置信息,此时,加权系数K1=1,K2=0。当<ω<ω2时,此时的估算速度为ω=K1ωHF+K2ωSM0,此种状态下的估算转速呈线性关系。当ω>ω2时,电机处于高速运行的状态,此时转子位置的检测就需要采用滑模控制法,此时的加权系数K1=0,K2=1。
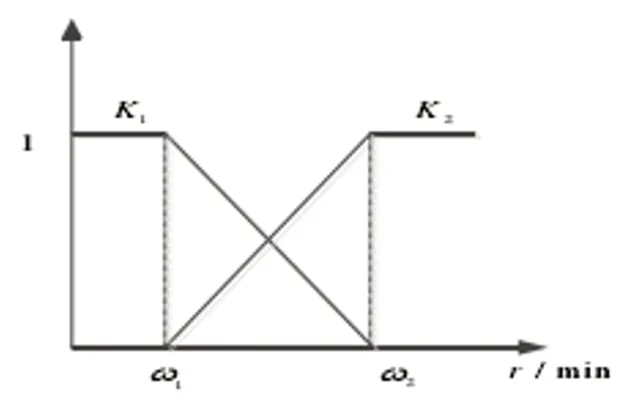
图4 加权系数法
在永磁同步电机的位置控制中,临界速度ω1、ω2的选取需要满足一定的条件,在保证满足电机能够处于低速运行的状态下,滑模变控制法能够稳定运行的最低转速要在临界速度ω1以下,同时,还需要保证电机处于转速较高的状态时,低速算法运行的稳定速度要在临界速度ω2以上。控制系统的结构框图如图5所示。
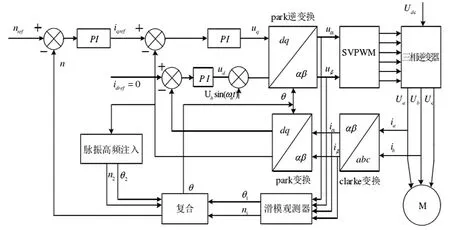
图5 电机位置辨识结构框图
4 结语
本文对电机处于不同转速下的情况分别进行分析,对于高转速下的电机,可以通过滑模变控制理论进行电机转子位置的估算控制,若电机处于低速或者静止的状态下,则需要注入脉振高频电压对电机转子位置进行估算。在永磁同步电机的运行中,要确保其能够稳定持续地运行,对转子位置的精准测量控制是非常重要的。在传统控制中通过传感器控制通常受环境的影响较大,且会增加电机运行的成本,所以对永磁同步电机的无传感器控制是非常重要的。
