报修信息生命周期化采集下的电子设备故障快速诊断方法
2022-09-06杨晓娜刘志远许亚伟
杨晓娜, 刘志远, 王 蔚, 周 佳, 许亚伟, 邓 珂
(1. 国网庆阳供电公司, 甘肃 庆阳 745000; 2. 国网甘肃省电力公司, 甘肃 兰州, 730030)
0 引 言
受到主要元件信号采样周期的限制, 电子设备极易出现设备内部组件漏电、 元器件老化、 短路、 电路板电容热稳定性差、 电阻效应等故障, 亟需快速确定设备故障原因, 从而采用相应的故障维修手段, 维修电子设备故障.
目前, 国内外将电子设备故障诊断分为故障分类和故障识别两部分, 通常采用信号处理、 解析模型、 基于知识的诊断3大部分诊断设备故障, 研究出基本框架[1]、 云平台[2]、 工况网络[3]等故障诊断技术, 同时, 文献[4]将电动后视镜驱动器作为研究对象, 针对其存在的故障问题, 采用EEMD技术提取其振动信号, 作为故障诊断数据, 诊断电动后视镜驱动器故障. 文献[5]采用D -S技术建立故障诊断模型, 诊断电子设备故障. 文献[6]将设备热成像故障作为诊断对象, 对比故障前后设备状态诊断设备故障.
但是, 现阶段的电子故障诊断技术, 在诊断电子设备故障时, 极易受电子设备报修信息生命周期影响, 只能准确诊断出电子设备中存在的单一故障, 且准确度低, 为此, 引入报修信息生命周期化采集条件, 提出报修信息生命周期化采集下的电子设备故障快速诊断方法.
1 报修信息生命周期化采集下的电子设备故障快速诊断方法
1.1 构建电子设备故障报修信息生命周期模型
电子设备正常运行到故障诊断的过程属于一个报修信息生命周期, 满足“酝酿期-爆发期-消解期” 这一周期性规律, 分别对应 “电子设备运行使用-故障报修-故障诊断”3个阶段[7]. 基于此, 从电子设备结构维、 信息表示维和生命周期维3个方面, 构建电子设备故障报修信息生命周期模型, 如图 1 所示.
图 1 中, 针对电子设备结构维, 考虑电子设备故障的原因在于某一部件或某一零件出现故障, 导致电子设备停止运行, 所以借助结构树思想, 采用节点表示形式, 将电子设备分为产品、 部件和零件3部分, 呈现出多层次的父子关系.

图 1 电子设备故障报修信息生命周期模型
针对模型的生命周期维, 将其划分为设备使用U1、 运行故障U2、 故障报修U3、 故障采集U4、 故障诊断U55个阶段, 称为电子设备故障报修信息生命周期模型的子模型, 电子设备故障报修信息生命周期模型U由子模型构成, 其形式化定义为
U=〈U1∪U2∪U3∪U4∪U5〉.
(1)
针对模型信息表示维, 以5个子模型为基础, 划分电子设备零部件数据源, 并将其映射为资源, 供设备故障诊断访问和调用电子设备运行数据.
1.2 周期化采集电子设备故障信息
依据图 1 所示的电子设备故障报修信息生命周期模型, 周期化采集电子设备故障信息, 基于电子设备运行数据波动程度, 确定数据采集间隔, 实现电子设备故障信息采集, 其信息采集步骤如下:
1) 将模型的5个子模型作为电子设备故障信息周期化采集的生命周期阶段;
2) 确定电子设备参数, 模型学习采集电子设备数据;

(2)
式中:P为在时间区间[t-n,t]内的采样点数, 其中n(n≥m>0)表示时间段;K(K>1)为在时间区间[t-m,t]内的采样点数, 其中m为时间段,t为最后一刻时间点;Ai,i=1,2,…k(k∈K)为第k个采样点数据;Ap,p=1,2,…,p(p∈P)为第p个采样点数据[8].

(3)
5) 计算自适应采样间隔ΔT, 其计算公式为

(4)
式中:T0为电子设备故障信息采集基准时间间隔;Tmax为电子设备故障信息最大采样间隔;ε为报修生命周期影响因子;Tmin为电子设备故障信息最小采样间隔[9].
6) 应用式(4)计算结果, 调整电子设备故障信息采样间隔, 结束故障信息采样. 综合上述6步采集到的电子设备故障信息, 提取其中存在的电子设备故障特征.
1.3 电子设备故障特征提取及处理
基于采集到的电子设备故障信息, 采用小波分析技术, 提取信息中的故障特征, 将电子设备故障信息中的电压信号分为高频和低频两部分, 依据设备信息的间隔采样点, 构成各频带信号的能量, 则电压信号第l层能量
(5)

δ=[E0,E1,…,El].
(6)
由于ζ中保存的电子设备故障数据量繁多且杂乱, 为此, 针对其进行归一化和降维处理, 仅保留电子设备主要故障特征, 以此达到快速诊断电子设备故障的目的, 其具体处理步骤如下:
1) 将式(6)进行归一化处理, 获取故障特征最小系数, 使其符合小波权值的取值范围, 即<1, 可知

(7)
式中:ζ为δ的归一化形式.
2) 采用主成分分析法, 建立特征向量相关性矩阵
(8)
式中:M为电子设备故障信息采集样本数目.
3) 应用ψ可以得到特征值γ1和特征向量η;
4) 计算第j个主元φj对总方差的贡献率
(9)
式中:N为主元的总数目.
5) 应用式(9)计算结果, 按照从大到小的顺序排列主元;
6) 计算第j个主元φj值
(10)
7) 依据式(10)计算所有主元值, 得到电子设备故障特征数据, 此时, 即可快速诊断电子设备存在的故障.
1.4 快速诊断电子设备故障
采用模糊神经网络和D -S理论相结合的方式诊断电子设备故障, 设计的电子设备故障诊断框架如图 2 所示.
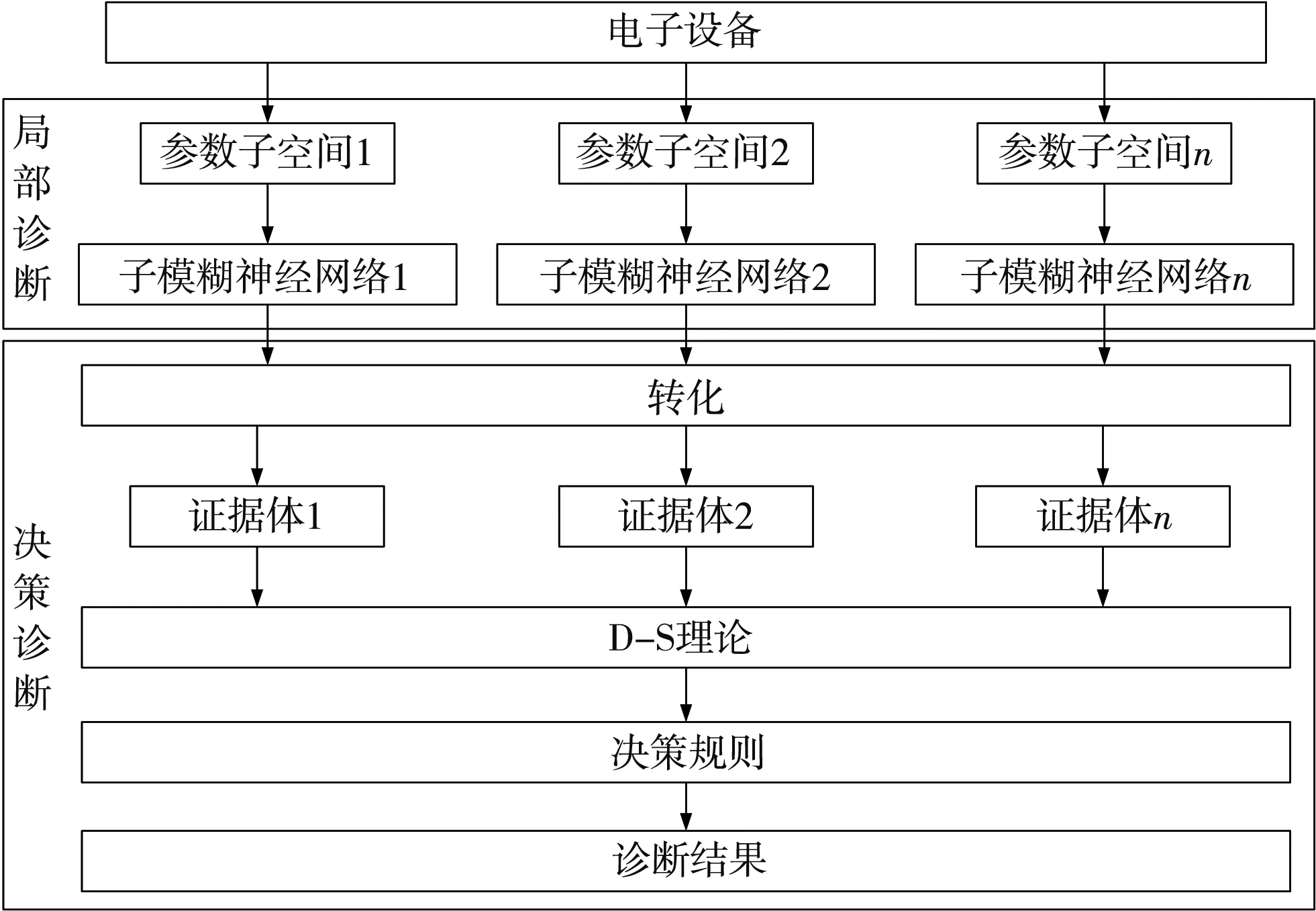
图 2 电子设备故障诊断框架
图 2 中, 将电子设备故障诊断分为局部诊断和决策诊断两部分. 其中, 局部诊断部分将1.3节中 7步处理后得到的电子设备故障特征数据作为特征参数, 构成参数空间, 并将其划分为n个子空间, 作为模糊神经网络输入数据, 应用输入特征划分参数子空间个数, 划分出等个数的子模糊神经网络, 经过n个子模糊神经网络训练特征数据后, 可以得到n个证据体
(11)
式中:k为网络第k层输出;Qik为网络局部诊断电子设备故障规则;yi为第i个证据体[11].应用式(11)计算得到的证据体yi进行决策诊断, 依据D -S理论得到的故障诊断决策规则为
(12)
基于此, 采用最大信任度确定电子设备故障类型, 则有

j=1,2,…,n,
(13)
2 实例测试
将差动放大器这一电子设备组件作为测试对象, 分析报修信息生命周期化采集下的电子设备故障快速诊断方法的应用效果.
2.1 差动放大器
选择的差动放大器电路及其参数值如图 3 所示. 当图 3 所示的差动放大器电路运行时, 电阻和电容存在±5%的容差.
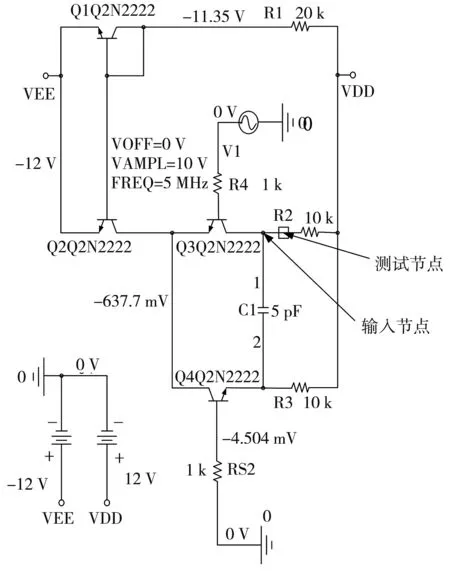
图 3 差动放大器
2.2 测试步骤
选择基于模态分解的故障诊断方法[4]和基于D -S理论的故障诊断方法[5]作为对比方法, 分析图3所示的差动放大器故障, 基于蒙特卡洛分析方法、 输出端电压信号, 得到故障测试数据.
2.3 提取故障特征
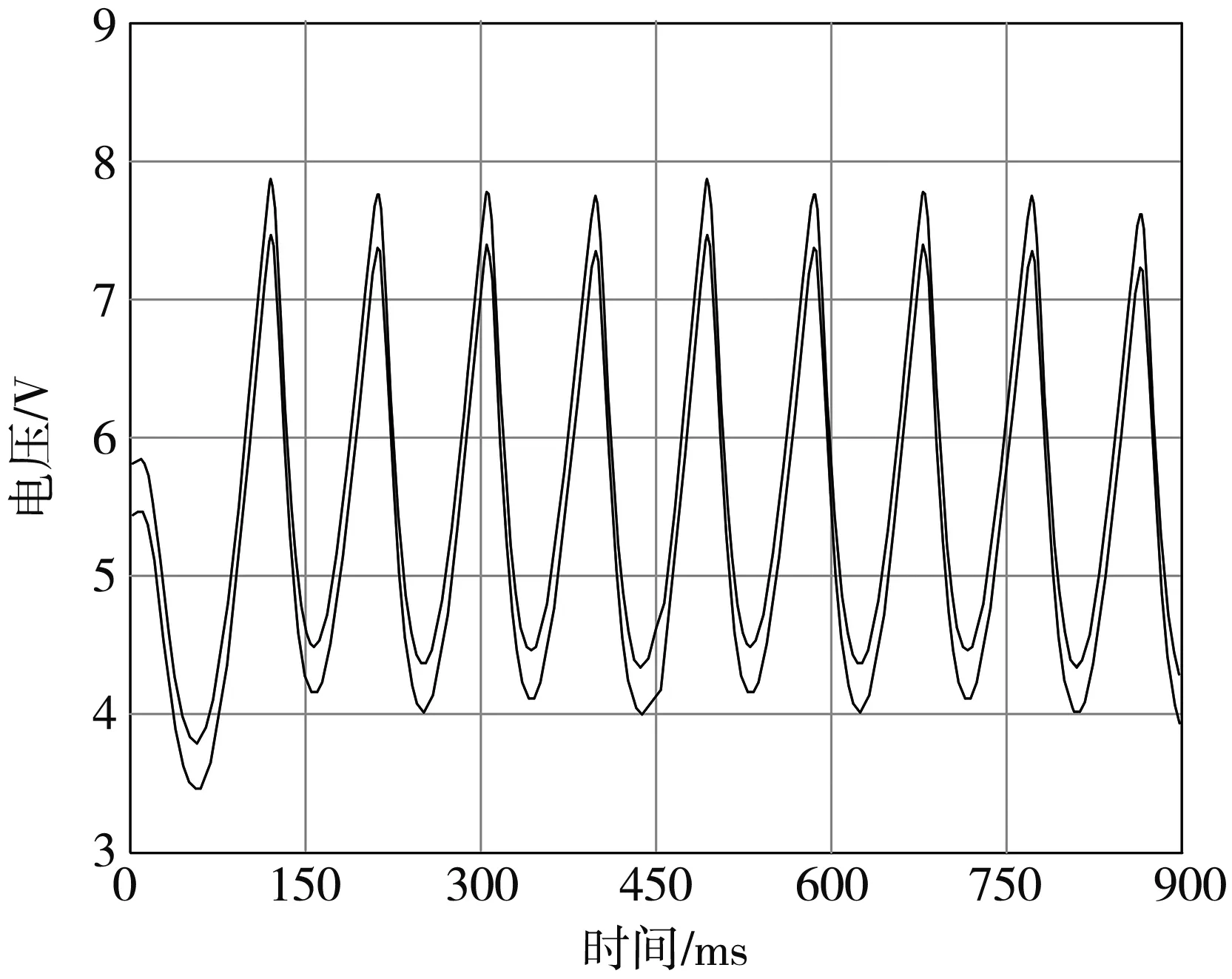
将C1电容设为差动放大器故障元件, 在图3中的输入节点处输入幅度为1 V 频率为5 MHz的正弦波. 当差动电路均处于C1短路故障时, 在图 3 所示的测试节点处, 收集到的差动放大器输出电压如图 4 所示.
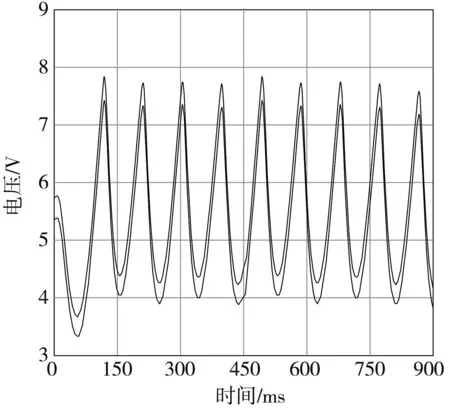
图 4 C1短路故障条件下差动放大器输出电压
将图 4 所示的C1短路故障输出电压作为3组故障诊断方法诊断C1短路故障标准, 比较3组诊断方法诊断C1短路故障性能.
2.4 电路故障诊断
采用3组故障诊断方法, 分别诊断差动放大器故障, 将得到的短路故障诊断结果与图 4 所示的输出电压图进行对比, 验证3组故障诊断方法故障诊断单一故障性能; 在C1短路故障基础上, 增添R1开路、 R2开路、 R3开路、 R4短路和Q4两端短路5种故障, 以及正常状态电路检测, 采用3组方法分别辨识差动放大器故障, 对比3组故障诊断方法诊断不同故障的性能.
2.4.1 短路故障诊断结果对比
3组故障诊断方法诊断差动放大器短路故障, 得到的差动放大器电压输出图如图 5 所示.
如图 4 中所示, 当差动放大器处于C1短路故障时, 其电压幅值在7.85 V~3.25 V之间波动. 由图 5 可知, 基于模态分解的故障诊断方法检测到的电压幅值在8.5 V~3 V之间波动; 基于D -S理论的故障诊断方法检测到的电压幅值在4 V~7.25 V之间波动, 而本文方法的电压幅值在7.85 V~3.25 V之间波动, 与图 4 的波动曲线较为拟合, 说明其输出值的准确度较高.
(a) 本文方法
2.4.2 6种故障诊断性能对比
该差动放大器包括6种故障和正常状态电路输出值, 如表 1 所示, 对表1所示的电路输出值数据进行35次蒙特卡洛分析, 电路每种状态分别分析5次, 以如表 1 所示的7种实际输出目标作为诊断结果对比值, 其他28种数据作为3组诊断方法的训练数据, 得到6种电路故障和电路正常状态目标值对比表, 如表 1 所示.
从表 1 中可知, 基于模态分解的故障诊断方法与7种电路状态的实际输出目标值差分别为0.020 4, 0.023 9, 0.998 1, 1.057, 0.003 2, 0.064 9, 0.005 1; 基于D -S理论的故障诊断方法与7种电路状态的实际输出目标值差分别为0.130 2, 0.058 5, 0.086 8, 0.009 9, 0.050 2, 0.906 3, 0.0686; 而本文方法与7种电路状态的实际输出目标值差分别为0.010 5, 0.000 8, 0.007 3, 0.001 1, 0.000 2, 0.000 6, 0.0004, 所产生的差值明显较小, 可以准确诊断不同类型的电路故障.
3 结束语
提出了报修信息生命周期化采集下的电子设备故障快速诊断方法, 考虑了电子设备故障报修信息生命周期, 采集电子设备故障信息, 电路故障输出目标值多样, 且准确度较高, 提高了电子设备不同故障类型诊断性能.
但是输出的证据体对电子设备故障诊断结果影响较大, 在今后的研究中, 还需深入研究证据体冲突系数, 进一步降低证据体对电子设备故障诊断结果的影响, 提高故障诊断准确度.
