Android智能手机间相对定位性能分析
2022-09-06王志斌张少波韩明敏黄威翰
甘 露,王志斌,张少波,韩明敏,陈 攀,黄威翰
(1.东南大学 交通学院,南京 211189;2.河北雄安京德高速公路有限公司,河北 霸州 065700;3.河北省交通规划设计研究院有限公司,石家庄 050021)
位置信息在人类生活中占有重要地位,智能手机GNSS又是位置获取和应用的主要媒介,因此实现智能手机高精度定位具有重要的实际意义。2016年Google在“I/O”会议上宣布,在Android7.0系统以上的Android智能手机中开放GNSS原始测量数据的获取接口[1]。在此基础上,GNSS研究者可以对Android智能手机的原始GNSS数据进行分析并借此实现高精度定位。自端口开放以来,大量研究者对智能手机高精度定位方法进行了研究,并得到了大量的研究结论。
相对于测地型接收机,智能手机GNSS数据在噪声和组成方面均有一定区别,因此需要对其定位模型进行针对性研究。在绝对定位方面,2016年,Banvilla等人利用三星手机进行了伪距定位实验,但该手机仅能获取GPS L1频段数据,因此仅能达到m级定位精度[2]。Zhang等人顾及手机伪距噪声的显著性,综合伪距、载波和多普勒观测值,采用时间滤波得到了亚米级定位精度[3]。Laurichesse利用多普勒观测值平滑伪距,实现了手机dm级定位精度[4]。2018年,Geng等人分析了Nexus平板数据,提出了三阈值单插滤波,并基于该方法得到了伪距单点定位(Single Point Positioning,SPP)亚米级定位精度[5]。实际上,上述定位方法主要从数据平滑角度实现安卓智能设备定位分析而没有对定位模型进行针对性改进。此外,多种型号的Android智能设备还可以获取载波观测值,基于此可以实现智能终端精密单点定位(PrecisePointPositioning,PPP)。2019年,Elmezayen和Wu等人基于Mi8手机双频GNSS观测数据,利用无电离层组合进行了测试,最终分别得到了dm级和m级定位精度[6-7]。Chen等人在数据分析的基础上对智能手机PPP模型进行了改进,最终实现了dm级定位精度[8]。2021年,朋子涵等人基于变分模态分解提取的手机观测噪声结果,拟合载噪比随机模型,PPP平面定位精度能够收敛至0.6 m以内[9]。郭斐等人提出了适用手机PPP定位的质量控制方案,基于此方案的PPP平面定位精度能达到0.5~0.6 m[10]。
区别于绝对定位方法,采用相对定位一方面可以一定程度上减弱大气误差影响,另外一方面还可以削弱不同卫星间固定偏差,进而提高定位精度。大量学者对Android智能手机相对定位性能进行了分析。2018年Warnant等人利用Android智能手机双频GNSS观测值进行了实验,证明了cm级定位结果的可行性[11]。2019年Zhang等人基于常加速度模型实现动态dm级定位精度[12]。2021年高成发等人采用常加速度动态单频卡尔曼滤波模型实现实时相对定位,定位结果27 s内达到稳定且平面定位精度为亚米级[13]。此外,Håkansson,Geng和Paziewiski等人的研究结果表明,相对定位情况下手机GNSS数据有实现模糊度固定的可行性[14-16]。
相较于绝对定位方法,相对定位能更稳定地实现智能手机高精度定位。但是,上述研究主要针对以测地型接收机为基准站的相对定位方法。在实际生活中,获取基准站数据主要通过连续运行参考站(Continuously Operating Reference Stations,CORS)播发的途径,而CORS系统密度和价格因素会对基于此的手机相对定位造成影响。相对地,以智能手机为基准站实现相对定位则在可行性方面具有显著优势。针对此,本文对安卓手机间相对定位方法进行研究。首先利用静态观测数据对不同安卓手机GNSS数据特性进行分析,以判断定位函数模型组成成分;其次对手机间静态相对定位和动态相对定位性能进行研究;最后总结手机间相对定位可行性。
1 智能手机GNSS观测值与相对定位模型
对于Android智能手机r和卫星s,频率i上的伪距和载波观测方程如下:
(1)

假设存在同步观测卫星s和l,手机r和手机m间的双差观测值形式如下:
(2)
当两手机间距离较近时,手机间双差大气延迟误差可以当作残差,则双差观测方程形式为:
(3)
在实际计算过程中,需要考虑未建模误差的具体情况。若经过分析未建模误差不满足零均值白噪声特性,则说明其中存在未建模参数,且会对定位结果造成显著影响。在该情况下,可以利用分析情况合理设计函数模型以实现位置的准确固定。若计算结果满足零均值白噪声特性,则不存在显著偏差。此外需要说明的是,由于手机模糊度影响,载波未建模偏差采用三阶差分的方法计算。但该方法仅能探测其趋势项,而系统性偏差则可能被模糊度参数吸收,进而造成模糊度失去整数特性。因此,本文不进行模糊度固定计算。
在动态相对定位过程中,文中采用常加速度运动模型,模型运行噪声计算方法如下:
(4)
2 数据分析
2.1 数据来源
文中利用4台手机进行数据实验,分别包括两台Xiaomi 8,1台Huawei P40和1台Huawei P30。测地型接收机采用华测i90惯导RTK,4台Android智能手机和测地型接收机的编号和详细信息见表1,后续设备描述沿用站名简写。数据采样和处理信息见表2。实际采集过程中分为静态过程和动态过程,在动态过程中以1台Xiaomi 8和1台Huawei P40作为基准站。为获取手机自身准确位置,测试过程中采用测地型接收机同步测量以获取参照位置。手机布设方式、静态实验位置和动态测试轨迹如图1所示。图1中圆形区域为静态实验摆放位置,周围实验环境开阔,无明显建筑物遮挡卫星信号。

表1 测地型接收机和智能手机软硬件详细信息

图1 手机布设方式、静态实验位置和动态测试轨迹
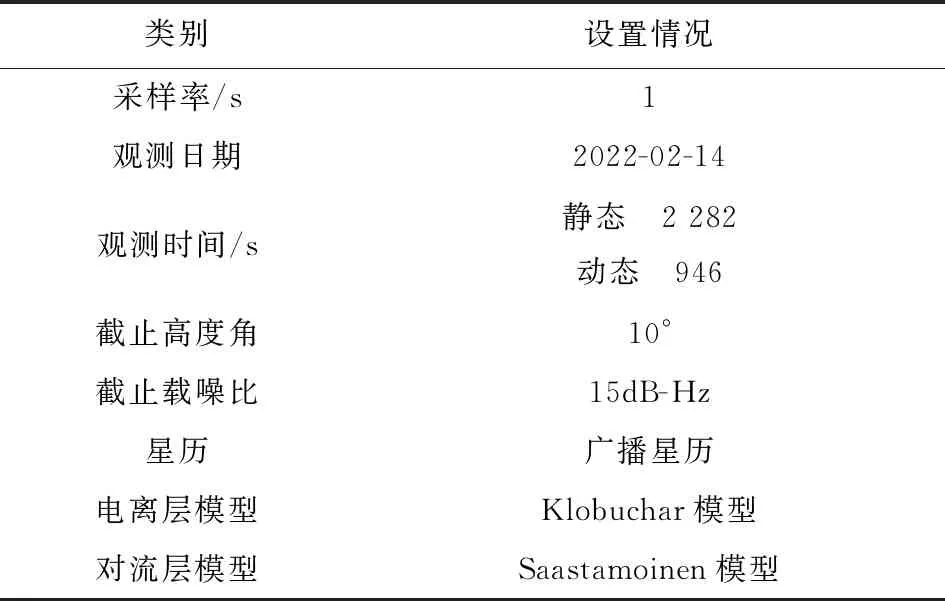
表2 数据采样与处理信息
2.2 数据特性分析
首先基于静态观测数据对手机间差分数据特性进行分析,文中选取3种手机数据组合策略进行分析,分别包括MI8E-MI8T,MI8E-HP40以及HP40-HP30。上述组合中分别包括两种同型号手机组合与一种不同型号手机组合,用以表示实际运用过程中不同手机的组合方式。
首先计算上述组合中双差伪距残差的分布情况,不同组合结果的直方图如图2所示。从左到右分别表示MI8E-MI8T,MI8E-HP40和HP40-HP30手机组合下伪距噪声的统计情况。从图2中可以看出,3种情况下伪距噪声统计结果均符合正态分布,说明不同手机组合情况下双差伪距残差不存在有色噪声成分。图3表示不同手机组合情况下不同系统双差伪距残差的箱型图统计结果。从图3中可以看出,3种手机组合的双差伪距残差的均值均接近于0,该情况说明双差伪距残差没有显著的系统性偏差。此外,从图3中还可以看出,手机GNSS观测数据质量与系统频率相关。不同手机组合中R1频段和E5a频段上的观测值噪声明显大于L1/L5/B1频段。

图2 双差伪距残差概率分布图

图3 双差伪距残差箱型图
图4表示手机间双差载波残差的计算结果。相对于伪距残差,载波残差计算结果量级显著减小,双差残差值基本都在0.5 m以内,这是由于手机载波观测数据精度较高。从图5中可以看出,MI8E-MI8T/MI8E-HP40两组数据计算结果均集中于0左右且两侧基本对称,该结果可以说明MI8E/MI8T/HP40 3台手机间的载波观测值没有显著趋势。但HP40-HP30组合计算结果不表现在0值两侧,该结果说明HP30手机载波观测值可能存在趋势项。后续需要进行进一步分析。需要说明的是,由于HP30和HP40手机缺失GLONASS系统的载波测量数据,所以图5中R1频率的箱型图为1条直线。

图4 双差载波残差概率分布图

图5 双差载波残差箱型图
2.3 静态定位结果分析
首先对静态情况下手机间相对定位性能进行分析,在计算过程中,分别以MI8E和HP40手机作为基准站,利用其余手机作为流动站。手机间组成3条不超过1 m的超短基线,手机间基线组合分别为MI8E-MI8T/MI8E-HP40/HP40-HP30。同时,利用华测接收机HC01作为基准站获取观测数据,并组成对比基线HC01-MI8T/HC01-HP40/HC01-HP30。两种情况下MI8E-MI8T/MI8E-HP40/HP40-HP30HC01-MI8T/HC01-HP40/HC01-HP30 6条超短基线的定位结果如图6所示,定位结果内符合和外符合偏差统计情况如表3所示。

表3 6条超短基线静态误差统计 m
图6表明智能手机相对定位误差在E,N和U 3个方向都有快速收敛的过程。高程方向不超过60 s就能获得相对平滑的结果,除了MI8T-MI8E基线外,其余5条基线都能收敛至2 m以内。平面方向MI8T-MI8E/MI8E-HP40基线能收敛至约1 m,达到平滑结果的时间不超过90 s。其余4条基线不超过30 s就能收敛至1 m以内,其中HC01-HP40基线2 400 s的平面定位RMSE值为0.21 m。
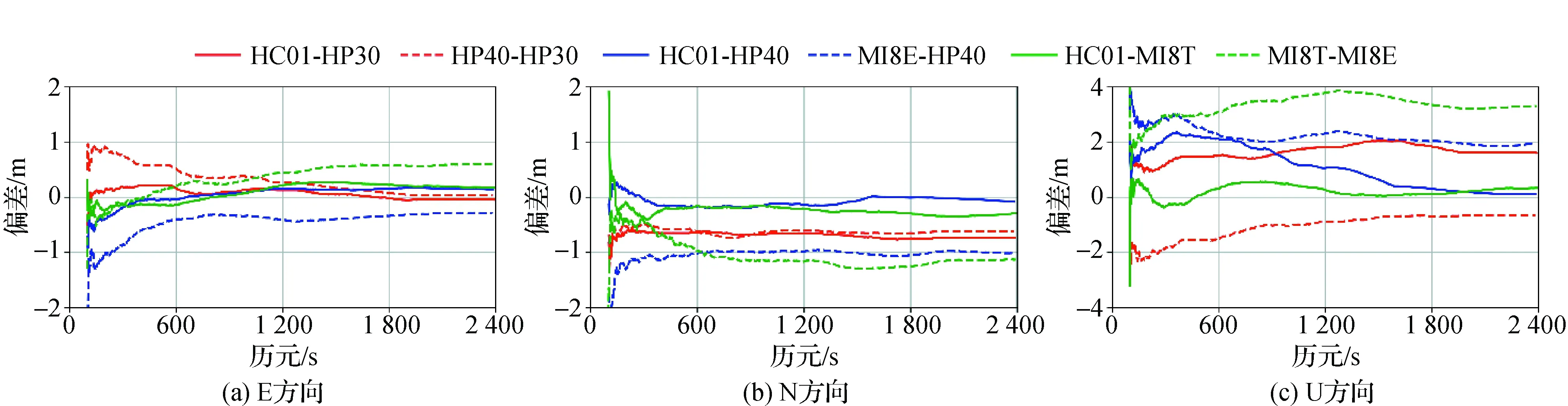
图6 6条超短基线相对定位E,N和U误差分布图
从表3可以看出,都采用测地型接收机作为基准站时,3台手机中HP40手机计算结果最优而MI8T手机的计算结果明显弱于其余两部手机,3款手机都能达到亚米级的平面定位精度。与采用智能手机为基准站相比,采用测地型接收机作为基准站的定位结果稳定性明显更强。但从外符合偏差的角度考虑,采用智能手机作为基准站时结果差距较小。此外需要注意的是,当采用同种型号手机作为基准时,HP40-HP30手机组合定位结果的外符合误差有小幅度变差。但MI8E-HP40手机组合定位结果明显变差。从该角度可以说明,不同的手机型号组合可能对手机间相对定位效果造成影响。由HP40-HP30的外符合偏差值可知,采用观测质量较好的HP40手机作为基准站时,HP40-HP30手机组合能够实现亚米级相对定位。
2.4 动态定位结果分析
在动态测试过程中,将智能手机与接收机进行同步观测,并将接收机观测数据作为定位基准以用于定位偏差计算。同步地,将MI8E和HP40手机进行静态观测,以作为相对定位过程中的参考基准。在该基础上,可以形成4组手机相对组合,分别为MI8E-MI8T/MI8E-HP30/HP40-MI8E/HP40-HP30,其中包括两组同品牌手机和两组不同品牌组成的基线。类似于静态测试过程,同时利用接收机观测数据与手机数据形成两组观测基线,分别为HC01-MI8T/HC01-HP30以用于定位效果比较。
不同基线动态相对定位计算结果偏差见图7。不同基线动态相对定位计算结果偏差的数据统计见表4。图8为HC01接收机计算获得的平均速度。从图8可以发现动态测试开始时会静止约1 min,动态测试过程的速度维持在1~2 m/s,为正常的行人速度。

图7 MI8E-MI8T动态相对定位E,N和U误差分布图

表4 智能手机动态误差统计 m
图8 动态定位过程速度变化图
从定位误差分布图7容易看出,在动态情况下,以测地型接收机作为基准站的相对定位结果明显优于以手机为基准站时的定位结果。而且以测地型接收机作为基准站的相对定位结果的稳定性明显好于以手机作为基准站。该结果可能是由于测地型接收机伪距和载波测量数据的质量和稳定性较智能手机更好。
此外,对比不同的手机组合可以看出,以HP40手机为基准站时,定位计算结果优于以MI8E为基准站时的结果。以HP40为基准站时计算结果较优的原因之一是该手机的GNSS数据质量较好。另外一个原因是HP40的观测卫星数明显多于MI8E,减少了由共视卫星匹配不足导致的观测数据无法充分利用。该结果可以一定程度说明动态测试时手机相对定位效果与手机品牌关系较小。
3 结 论
本文对Android智能手机间相对定位进行了研究,并对定位结果进行了分析,得到了以下结论:
1)在固定坐标的情况下对手机间超短基线双差数据性质进行了分析。对于双差伪距观测数据,不同手机的计算结果均满足正态分布,且均值为零。双差载波观测数据计算结果同样满足正态分布。这说明手机间GNSS观测数据间不存在明显的趋势项和系统性偏差,因此不需要对定位函数模型进行针对性改进。
2)在静态情况下,与测地型接收机作为基准站相比,采用智能手机作为基准站时,智能手机间相对定位的稳定性更差。但是同型号的智能手机间相对定位的外符合偏差与智能手机和测地型接收机的相比基本一致。在动态情况下,与测地型接收机作为基准站相比,所有的智能手机组合相对定位的效果都更差。
3)实验说明了Android智能手机间相对定位精度有达到亚米级的能力,为智能手机GNSS在测绘工程领域的运用提供了一种低成本的解决思路。
