某型雷达稳定平台便携式检测仪的设计与实现*
2022-09-06朱秋生张玉康
朱秋生 张玉康
(中国人民解放军91114部队 上海 200434)
1 引言
某新型舰载雷达稳定平台用于消除摇摆对雷达天线指向的影响,使天线转台始终保持水平,确保雷达测量的精度。稳定平台伺服系统是一个角度随动系统,其角度跟踪精度直接影响整个平台伺服系统的精度。
该型雷达装上舰艇后,平台系统受条件限制,只能手动装订数据,检查平台工作后能否消除误差且不产生振荡,至于平台的跟踪精度、角速度、角加速度等则无法测试。因此最常出现的情况是舰艇在码头检查平台工作正常,一旦出海遇到风浪稍大,平台工作效果不佳的情况时,很难判断故障所在,况且平台能否正常工作还与罗经系统有关,互相推诿的事经常发生。
该检测仪利用虚拟仪器技术,通过图形化编程软件为用户提供一个友好的软件面板,完成参数设置、函数调用,产生各种激励信号通过总线送给被测对象,被测对象送出响应数据经转换后送给PC机供检测分析。
2 设计总体思路
该检测仪主要实现模拟旋变输出、误差信号检测和罗经信号检测。检测仪部件模块主要以旋转变压器为被测目标,以DRC轴角转换技术为基础信号源,模拟仿真各种运动状态,通过AD采样技术采集旋转变压器的误差信号,并伴随前馈输出驱动天线跟踪,液晶显示面板直观地将各状态信息反馈显示。检测仪通过信号产生单元分别生成模拟纵横摇角度信号、旋变前馈信号送至雷达稳定平台旋变;通过误差采集单元对稳定平台旋变产生的纵横摇误差信号进行采样处理,得到当前误差信息;通过罗经检测单元采集罗经角度信号、前馈信号和罗经旋变误差进行数据处理以检测罗经相关信号是否正常。
3 系统组成
该检测仪系统中,功能上由轴角转换单元、误差采集单元、前馈产生单元、数据处理单元等组成;硬件上由电源板、转换板、控制板和触摸式平板电脑等组成。
4 硬件设计
该检测仪分为纵摇通道、横摇通道,两个通道硬件相同,均由电源板、转换板和控制板组成。
1)电源系统
采用AC-DC转换模块,外部电源提供交流220V/50Hz,通过相应AC-DC模块转换为+5V,+3.3V,±15V,±45V的电压供给其他板卡使用。实现原理框图如图2所示。

图1 稳定平台检测仪原理框图

图2 系统硬件组成框图
2)转换板
转换板由DRC轴角转换模块、AD误差采样单元和DA前馈产生电路组成,主要实现模拟纵、横摇旋变角度生成、前馈信号产生和平台旋变误差采集,旋变角度由DSC模块产生、前馈信号采用DAC完成,误差采集由ADC采样。

图3 电源系统组成框图
设计中采用DSC0516数字-轴角转换器,将14位高精度数字角度信号按照系统速比要求转换成旋变模拟角度信号,其参考电压为115V/400Hz,AD旋变误差采样单元选用ADI公司的AD7685芯片实现,该芯片是一款16位、电荷再分配、逐次逼近型模数转换器(ADC),其采样精度16位、采样率最大为250MHz、模拟输入信号范围为0~5Vpp,采用10引脚QFN封装,前馈产生单元采用ADI公司的AD5543芯片实现,该芯片是16位、低功耗、电流输出、小尺寸数模转换器(DAC),采用5V单电源供电。
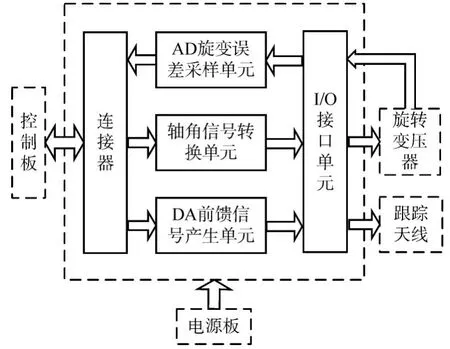
图4 转换板组成框图
3)控制板
控制板主要由RDC轴角转换模块、AD采样单元和FPGA数据处理单元组成,实现罗经角度信号、前馈信号和罗经旋变误差的检测。RDC轴角变换单元将接收的罗经角度信号转换为数字信号送FPGA进行处理,两路DA采样单元分别采集罗经旋变误差和罗经前馈信号送FPGA进行数据处理,并通过串口将处理结果显示到触摸显示屏上。
设计中采用RDC2904轴角-数字转换模块,将旋变产生的模拟信号转换为数字信号,其分别率为16位,具有较高精度和较高跟踪速率。FPGA作为核心元件完成整个系统的数据处理并通过串口和上位机通信,采用Xilinx公司的XC6SLX9-3TQG144,该逻辑器件内部有9152个逻辑单元,1430个宏单元,可用I/O数量为102,电源电压为1.14V~1.26V。
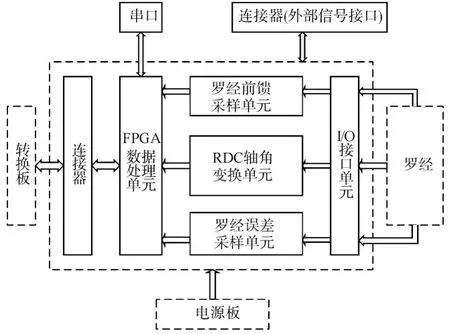
图5 控制板组成框图
4)人机交互模块
人机交互模块采用Touch Panel PC(触摸式平板电脑),通过串口与底层硬件进行通信,采用QT语言编写的交互软件在嵌入Windows XP操作系统上运行,实现友好的人机交互界面。
5 软件设计
1)FPGA逻辑编程
FPGA逻辑编程采用VHDL语言进行,VHDL语言主要用于描述数字系统的结构、行为、功能和接口,是标准化的硬件描述语言。FPGA的逻辑描述为上位机与FPGA通过RS232串口实现数据交换,FPGA解析上位机发出的指令,驱动相关模块执行该指令并将执行情况向上位机反馈。
2)应用程序设计
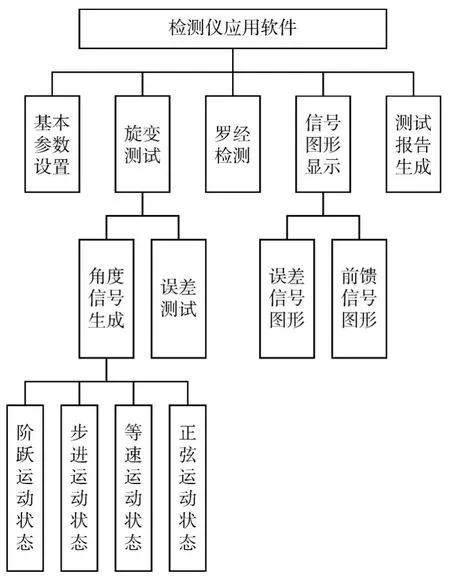
图6 平台检测仪应用软件功能模块组成
应用软件基于Windows XP操作系统,采用跨平台开发语言QT进行开发。应用软件主要由基本参数设置、旋变测试、罗经检测和测试报告生成等功能模块组成,如图7所示,其工作流程如图8所示。

图7 检测仪应用程序流程
检测仪应用软件按功能模块组织界面,“设置”区域主要设置上、下限角度和速比,前馈信号AC/DC可切换,还可设置校零信息;“罗经”区域主要完成罗经角度、误差和前馈的检测;“旋变”区域主要选择旋变输出的阶跃、步进、等速和正弦运动状态,输入相关参数执行测试;图形显示区域用来显示误差电压和旋变输出曲线。
6 结语
该检测仪不仅能模拟海上摇摆情况,同时通过对回传的信号实时进行分析。通用性好,只需对接口电路改装和软件修改就可应用到其他雷达平台系统,有效提高了维修检测效率和维修质量。
