智能无人集群协同作战仿真模型功能与体系设计*
2022-09-06丁泽柳巩炳林
伊 山 杜 静 丁泽柳 巩炳林
(军事科学院战略评估咨询中心 北京 100091)
1 引言
当前人类社会已进入智能化机器人时代,以人工智能为标志的第二次机器革命正在加速智能化机器时代战争的形成[1]。无人车、无人机、无人艇、无人潜航器等无人系统[2]的集群作战将产生颠覆性的作战样式。作战仿真模拟是演示作战概念、验证无人集群装备、评估无人作战智能等级和无人系统对联合作战整体贡献度的有效方法手段。作战仿真模型是智能无人集群作战仿真系统的核心组成部分,也是决定仿真评估效果的关键。
目前,对智能无人集群仿真模型研究,主要聚焦在无人集群任务规划[3~4]、飞行控制[5]、态势感知、自组网通信、行为规则[6]和智能算法等技术层面。国内外对无人集群作战运用建模仿真研究还在探索阶段[7]。军事科学院许瑞明等基于群体智能无人机系统作战能力指标对仿真演示需求和实体分辨率需求进行了分析[8],国防大学邹立岩构建了一种基于OODA—L的智能无人集群作战仿真建模框架[9]。以上论文对无人集群作战建模的某个侧面进行了阐述,而没有从智能无人集群作战体系对抗和组件化建模角度分析模型体系。本研究以无人化体系作战理论为牵引,基于组件化建模思想,从未来智能无人集群作战运用、体系对抗角度,设计仿真模型功能,分析组件化建模思路,提出智能无人集群体系作战组件化仿真模型体系。
2 无人集群作战仿真模型功能设计
未来智能化特点的信息化战场上,以智能化装备为装备体系主体,打赢无人系统及集群体系对抗行动为主要作战目的,并将不断产生新的联合作战样式。为了验证机器人操作[10]系统性能,检验无人系统装备作战运用,模拟演示无人化作战产生的新型作战样式,评估无人系统作战对联合作战的体系贡献率,牵引智能化作战体系的设计和论证,不仅需构建仿真引擎、作战想定编辑、仿真推演、各方作业、态势显示、仿真评估和仿真模型管理等仿真支撑系统[11~12],更需要设计开发完备的智能无人集群体系对抗行动仿真所需的各类仿真模型。
为了开展智能无人集群体系作战仿真,基于自主开发的仿真引擎及组件化建模框架,突破无人系统单体和群体构模技术,设计典型作战场景涉及的空中、陆上、水面和水下多域异构无人系统及集群模型,开发集成联合作战模型,包括武器装备模型、兵力模型、通信交互模型及指挥控制模型等,构建战场环境模型和评估模型,从而逐步形成组件化多分辨率无人集群体系对抗仿真模型体系。
2.1 智能无人系统模型功能设计
1)无人系统单实体模型。要设计智能无人集群体系作战涉及的空中、陆上、水面和水下多域异构无人系统装备模型和组件模型。一是无人系统装备模型,描述多域异构无人系统装备平台的战技性能,如无人机运动学、动力学特性。描述地理、气象、电磁环境对装备平台机动、探测、通信、射击的影响效果。二是无人系统组件模型,构建无人系统的载荷模型、武器系统模型,包括雷达、红外、光电传感器、导航设备等载荷物理模型以及武器系统模型。
2)无人集群管理模型。通过对无人集群静态属性、行动属性、队形管理、行为规范、群间关系、交互属性等进行描述,具备群内部管理、群间管理、群与其它作战单元之间紧密关联的能力。一是集群静态属性,描述群的基本信息,包括群成员构成、群成员指挥关系、群成员通信关系等。二是集群行动属性,描述群的动作行为信息,包括建立群、解散群、群成员加入、群成员退出和群基础动作等。三是集群队形管理,包括群队形编辑、群队形变换、群队形维持、速度控制、航行路线控制等。四是集群行为规则,描述集群内所有成员遵循的共同规则,规定集群行动的触发时机和条件,如无人机群长机确定规则、长机接替规则、通信规则、群避让规则、目标分配规则等。五是集群交互属性,描述集群与外界环境的交互关系。如集群的传感器探测信息、集群传感器综合信息、集群与作战指挥单元的指令交互。
3)无人系统集群行为模型。运用建模和AI技术,实现执行典型作战任务涉及的无人系统自主OODA(感知-判断-决策-行动)行为链模型。一是感知模型。对无人系统装载的雷达、红外、光电传感器的侦察、探测行为进行细粒度仿真,能够对无人系统传感器探测目标、周围背景信息以及外部指挥信息系统输入的态势信息进行融合处理,适应战场目标数量、类别、位置的变化,形成无人系统协同作战实时战场态势,具备破除假目标、电子干扰、隐蔽伪装、地形地貌等战场迷雾能力。二是判断模型。根据无人系统感知模型输出的战场态势数据,对战场态势进行分析判断和认知,形成对局部战场态势的评估判断结论。三是决策模型。将观察、判断环节的感知数据和作战命令,转化为无人系统的具体行动指令,包括路径规划、任务协同、编队协同、威胁规避、指令仲裁、跨域协同打击等决策模型,实现面向无人集群整体的协同与决策规划。四是行动模型。基于决策模型得到的行动方案,对无人系统的作战行动过程进行仿真,如无人机起飞/降落、编队、沿预定航线飞行和避障、侦察监视、通信中继、导航增强、打击目标、应对威胁等。
2.2 作战模型功能设计
作战模型是无人系统在联合作战体系对抗背景下,面对作战情况时需要运用的各类仿真模型,主要包括武器装备模型[22]、兵力模型、通信交互模型及指挥控制模型等。
1)武器装备模型。一是作战平台。构建无人集群典型作战构想涉及的陆、海、空、火、天、电作战平台仿真模型,支持对作战平台行动的仿真,反映作战平台各种战术技术参数的作用,如雷达反射截面积、运动速度、加速度、飞行高度等参数。根据需要描述作战平台的运动学、动力学特性,描述地理、气象、电磁环境对平台机动、探测、通信、射击等性能的影响。二是传感器。建立无人集群典型作战构想涉及的武器平台装载的传感器模型,支持其探测各类目标功能的仿真。对无人系统装载的雷达、红外、光电传感器的侦察、探测过程及功能进行较细粒度的建模。三是电子干扰、欺骗设备。建立无人集群典型作战构想涉及的干扰、欺骗设备模型,如电子诱饵、箔条弹、多频谱烟雾,支持其对各类雷达、光电设备、通信设备的干扰、欺骗功能的仿真。对无人系统干扰、欺骗设备进行较细粒度的建模。四是通信设备。建立无人集群典型作战构想涉及的通信设备模型,支持作战平台之间的信息传输功能的仿真。对无人系统搭载的通信设备进行较细粒度的建模。五是武器系统。建立无人集群典型作战构想涉及的作战平台搭载的武器系统模型,支持各类作战平台对所挂载弹药的发射控制和制导攻击过程的仿真,支持对所挂载弹药的武器选择、发射条件判断、弹药发射、制导控制等功能的仿真。对无人系统空空作战武器系统、空地作战武器系统、地空作战武器系统等进行较细粒度的建模。六是弹药。建立无人集群典型作战构想涉及的弹药模型,支持对弹药发射、飞行到命中目标的过程的仿真,以及命中后对特定打击目标的毁伤效果的仿真。
2)兵力模型。建立无人集群典型作战构想涉及的不同粒度的红蓝方兵力模型,最小可到作战编组,较小作战单元的兵力模型可聚合为较大单元的兵力模型,如班可聚合为排,排可聚合为连。
3)通信交互模型。建立无人集群典型作战构想涉及的红蓝方作战通信交互模型,描述由各类通信结点构成的通信网络拓扑结构,支持指控信息、测控信息、情报信息的传递以及信息的中继传输等功能的仿真。在强干扰条件下,对无人系统域内通信、域间通信进行建模,实现无人系统态势感知信息的共享,指控信息和协同信息的传递等。
4)指挥控制模型。建立无人集群典型作战构想涉及的红蓝方指挥控制模型,支持情报融合、态势判断、指挥决策、行动控制等功能的仿真,包括指挥控制关系模型、信息(态势)融合模型、指挥决策模型、指挥信息流模型等。
2.3 战场环境模型功能设计
针对无人集群典型作战构想涉及的应用场景,构建虚拟立体战场环境,包括地理环境、气象环境、电磁环境等。
1)地理环境。建立无人集群典型作战构想涉及的地理环境模型,支持对地理数据的管理、运算、分析及显示,根据系统仿真需要,可抽象出其对作战行动影响最大的典型因素,如地形的起伏、植被、地貌等,并可对通行性、通视性、隐蔽性等进行量化描述。
2)气象环境。建立无人集群典型作战构想涉及作战地区的气象环境模型,可量化描述对无人集群作战行动有影响的温度、湿度、风、云、能见度、雨量等气象征候要素,并重点描述雷雨云、强风等对无人系统作战行动有较大影响的气象过程。
3)电磁环境。建立无人集群典型作战构想涉及作战地域的电磁环境模型,包括我方辐射源、敌方辐射源、民用辐射源和自然辐射源,重点描述对无人系统通信、侦察、导航等行动有较大影响的复杂电磁环境。
2.4 仿真评估模型功能设计
仿真评估模型的作用是,通过对仿真过程和结果数据的统计计算,评估无人集群作战效能和对联合作战的贡献度。根据无人群体不同作战任务的评估需求,选择不同的指标集建立相应的指标体系,并可选择不同的评估方法以构建相应的评估计算模型。针对智能无人集群体系作战评估,要突破因果关系数据推理评估方法,设计评估算法和评估规则,研究形成无人集群作战数据、作战方案、作战结果的因果推理路径,评估无人系统智能水平,优化作战效能。如对智能无人机群体基本飞行能力、作战过程生存率、抵近侦察能力、群信息和传输处理能力、精确打击能力进行评估。
3 无人集群作战仿真组件化模型组成设计
为了提高仿真模型的重用性、可移植性、可组合性,当前国内外主流作战仿真系统基本以组件化建模思路构建。组件化建模是将战场实体按照其功能部件组成及替换、重用的要求进行拆分,分别建立组件模型,再进一步组装为完整的装备实体,在统一的作战想定驱动下参与仿真运行。本研究按照组件化多粒度建模思路,基于国内自主可控的作战仿真系统中规定的模型框架、建模规范,设计研发了智能无人集群体系作战仿真应用中的无人系统仿真模型和军种作战仿真模型。
智能无人集群体系作战仿真建模工具提供基础模型体系结构,约束了无人集群作战仿真模型层次关系。基于该架构开发的各类模型,通过仿真元素类(sim_element)提供的模型框架(set_framework)、事件管理器(set_event_manager)、仿真元素初始化(on_init)等方法,实现模型与仿真框架、服务等之间的对接,从而被仿真引擎直接识别运行。按照建模对象的功能类别,模型对象类分为作战实体模型和组件模型。无人集群作战仿真组件化建模组成规范如图1所示。
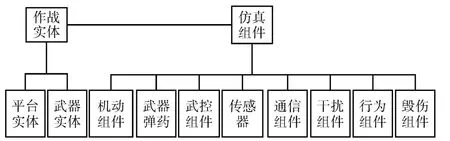
图1 组件化建模组成规范图
1)作战实体(SimBSE)。一是平台实体(Entity),继承SimBSE类基本功能基础上,提供组件装配的功能。按照组件化建模思路,Entity可添加、删除、获取组件,是其它组件模型的承载容器,可控制和协同组件模型运行,实现对实体能力的仿真,例如,组件组装到实体的过程,是通过平台实体的关键方法add_component()实现。平台实体可添加行为组件,具备行为能力,也能够产生和处理通信消息。二是武器实体(Weapon_Entity),与平台实体不同,具备战斗部和引信,在特定发射平台发射后才能产生。同时,在想定部署阶段,武器实体是不能直接部署在战场上,需挂载到发射平台后执行。
2)组件类(SimComponent),是实体可装配组件的基类。在组件化建模过程中,组件通过组装的方式添加到实体上,与实体及其它仿真组件共同完成某项作战仿真功能。智能无人集群体系作战仿真建模工具中,从仿真组件基类可继承多种功能组件,包括机动组件(MotionCom)、武器弹药组件(WeaponProfile)、武控组件(WeaponSystem)、传感器组件(Sensor),通信组件(Comdev)、干扰组件(Jammer)、行为组件(BehaviorComponent)和毁伤组件(LethalComponent)等。每种组件反应不同作战业务功能,又统一受到实体模型的组织和调度。
4 无人集群作战仿真模型体系设计
根据智能无人集群作战仿真模型功能设计,基于组件化建模思路,分别对智能无人集群仿真模型架构和智能无人集群体系对抗仿真模型体系进行分析研究。
4.1 无人集群仿真模型框架
智能无人集群仿真模型,由无人系统单实体模型、无人集群管理模型和无人系统集群行为模型组成。如智能无人机实体,是在无人机平台实体上组装机动、武器弹药、武控、传感器,通信、干扰、行为等组件而成。无人机群,通过对集群静态属性、集群行动属性、集群队形管理、集群行为规则和集群交互属性的协调管理,形成有机整体。无人机群行为模型,运用建模和AI技术,实现执行作战任务中无人机群自主OODA(感知-判断-决策-行动)行为链模型。智能无人集群仿真模型架构如图2所示。

图2 智能无人集群仿真模型架构图
4.2 无人集群体系作战仿真模型体系
依据智能无人集群模型功能设计和组件化模型设计思路,智能无人集群体系作战仿真模型体系,由无人系统仿真模型、作战仿真模型和战场环境仿真模型等组成。其中,智能无人系统的组件组成与作战模型组成表面上看比较相似,但不同处在于智能无人系统模型算法的粒度和运行架构上,与各类作战模型的差距是巨大的。比如,无人系统传感器模型的粒度、特性要求,与战斗机的不同。无人系统是以OODA环行为架构进行构摸,而作战模型不需要建立这样的行为架构。
智能无人集群作战仿真模型体系如图3所示。

图3 智能无人集群协同作战仿真模型体系图
5 结语
智能无人集群体系作战,将带来新的作战样式,也是军事强国高度关注和强化的作战方式[13]。仿真模拟是研究智能无人集群作战的重要手段,作战仿真模型又是仿真模拟的关键。本研究结合传统联合作战仿真模型特点,对智能无人集群作战仿真模型功能、组件化模型设计、无人集群模型框架、模型体系内容等进行了研究。未来将基于本研究提出的模型功能设计和组成内容,开展智能无人集群细粒度仿真模型、作战仿真模型算法研究,并在仿真模型系统研发中不断深化实现。
