自动驾驶转向测试方案构建
2022-09-06刘育铭张志鹏沙诗伟
刘育铭 张志鹏 沙诗伟
1.北华大学 吉林省吉林市 132000 2.中汽研汽车检验中心(常州)有限公司 江苏省常州市 213100
1 引言
随着高级驾驶辅助系统在智能驾驶车辆上的应用不断增多,随之而来的自动驾驶功能测试需求也在迅速增加。依据美国汽车工程师学会SAE(Society of Automotive Engineers,SAE)自动驾驶等级划分规定,高级驾驶辅助系统处于具备预警类和辅助干预类功能的阶段。目前对自动驾驶辅助系统进行道路测试已经成为必然要求,以保证L2级自动驾驶车辆的安全性与可靠性。
本文围绕着自动驾驶转向测试,通过对自动驾驶转向的实车测试方案的研究,结合国内外现状及实际道路测试过程,提出方案构建方法,为车企提供思路与参考。
2 国内外现状
近年来针对高级驾驶辅助系统,国内外成立专项小组开展智能网联汽车和自动驾驶车辆标准制定工作。中国的全国汽车标准化技术委员会成立了智能网联汽车分标委,专门从事相关标准制定工作。UNECE 的WP.29于2018 年6 月成立“联合国智能网联法律工作组”。国际标准组织ISO 成立 TC22 和TC204,负责道路车辆和智能交通系统。
目前,国内外已经出台了若干个相关标准,主要面向多类驾驶辅助系统,例如ISO 11270-2014,GB/T 39323-2020 等。但是,对于自动转向功能测试还尚未有一个适用于符合我国的方案,并且自动转向测试所涉及的场景与项目较多,仍需研究与发展。
3 测试方案定义与测试基本条件
3.1 功能定义
针对R79 所规定的2 级自动驾驶转向(Automatically Commanded Steering Function, ACSF)的功能要求,表1 显示了测试中用到的各功能定义。

表1 功能定义
3.2 测试条件
(1)测试道路:试验应在具有良好附着力的平坦、干燥的沥青或混凝土表面上进行。
(2)环境温度:应保持在0℃~45℃之间。
(3)车道标识:车道标识线应清晰可见,可见度明显,车道宽度3.5m。
(4)公差范围:测试速度应满足±2 公里/小时的公差。
(5)车辆要求:测试过程中车重不得调整,车重和胎压需符合规定。
(6)横向加速度:测量确定重心位置,在测量横向加速度时应去除由于车身自身运动而产生的附加影响。(例如,弹簧产生的)
4 测试项目及要求
测试内容主要包括转向纠偏 (Corrective Steering Functions, CSF)、紧急转向(Emergency Steering Functions, ESF)、A-C 类ACSF(Automatically Commanded Steering Function),如表2。

表2 测试内容
4.1 转向纠偏CSF 测试
转向纠偏是在一定时间内,通过判断车上发出的信号,改变车轮的转向角度,来补偿车辆侧向力的变化,纠正车道偏离。
(1)警告测试
车辆应在车道两侧有车道标记的道路上使用激活的CSF 驾驶。在测试过程中,记录CSF 干预的持续时间以及光声警告信号的持续时间。
(2)覆盖力测试
车辆应在车道两侧有车道标记的道路上使用激活的CSF 驾驶。行驶时应试图使车辆离开车道并引起CSF 干预,驾驶员在方向盘上施加一个力,以改变CSF 干预。记录驾驶员为解除干预而对转向控制施加的力。
4.2 紧急转向ESF 测试
紧急转向功能是指车辆在行驶过程中在一定时间内控制转向系统进行车辆紧急转向,来避免或减弱碰撞。
车辆应在每一边都有车道标记的道路上驾驶,并定位在这些车道标记内。
(1)ESF a 型i/ii 测试:(非故意侧移):在相邻车道行驶的目标车辆应接近被测车辆,其中一辆车应将其横向分离距离最小化,直到启动ESF 干预,如图1 所示。
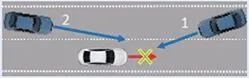
图1 ESF a 型i/ii 测试场景
(2)ESF a 型iii 测试:(故意侧移):当另一辆车在相邻车道行驶时,被测车辆开始变道,避免了ESF 系统的干预导致碰撞,如图2 所示。
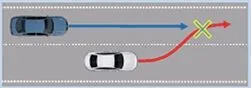
图2 ESF a 型iii 测试场景
(3)ESF b 型测试:被测车辆应接近位于其轨道内的物体。物体的大小和位置应使车辆能够在不穿越车道标志的情况下通过该物体,如图3 所示。

图3 ESF b 型测试场景
(4)在没有车道标志的情况下运行系统的测试:如果任何系统在没有车道标志的情况下工作,则需要在没有车道标志的测试轨道上重复进行(1)-(3)的测试。
(5)ESF 对b 类误反应测试:被测车辆应接近位于车辆轨迹上的车道标记之间的一块与路面颜色对比的塑料片,该塑料片厚度小于3 毫米,宽度为0.8 米,长度为2 米。塑料片的放置方式应使车辆能够在不穿越车道标志的情况下通过塑料片。
4.3 A 类ACSF
A 类ACSF 功能是指在速度不超过10km/h 的情况下辅助驾驶员在低速或泊车时使用的系统。
(1)系统只能在10km/h(+2km/h公差)的速度下使用。
(2)只有在驾驶员主动操作后,并且满足运行条件,系统才能激活。并且系统能够随时被驾驶员关闭。
(3) 对 于RCP(Remote Controlled Parking,遥控泊车),至少应在远程控制设备上提供光学警示信号用以警示驾驶员。
远程遥控泊车如图4 所示,泊车过程需要驾驶员持续操作遥控装置,如果连续操作中断或车辆与遥控设备之间距离超过规定的最大RCP 操作范围,或者遥控器与车辆之间信号丢失,则车辆应刹停。RCP 的最大操作距离不能超过6m。停车状态时,应保证车辆不溜车。

图4 远程遥控泊车
4.4 B1 类ACSF
B1 类 ACSF 功能由驾驶员开启,使车辆保持在设定的车道内行驶。
(1)最大横向加速度要求:如表3 和表4 所示为车辆转弯时的最大横向加速度范围。车辆在转弯的工况下,要求最大横向加速度在0.5s 内的平均变化率不超过5m/s。

表3 适用于M1、N1 类车辆转弯时的最大横下加速度范围

表4 适用于M2、M3、N2、N3 类车辆转弯时的最大横下加速度范围
(2)覆盖力要求:超越系统提供的方向控制所需的转向控制力不得超过50N,且车辆必须在没有驾驶员对转向控制装置施加任何力(例如把手从转向控制装置上移开)的情况下,以恒定速度行驶在每一边都有行车标志的弯曲轨道上。

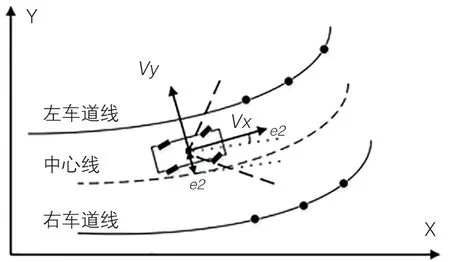
图5 弯道车道保持示意图


表5 车道保持测试设计


表6 最大侧向加速度测试设计
(3)覆盖力测试:测试流程与车道保持测试流程类似,弯道行驶的最大侧向加速度应在表3 和表4 规定的80%-90%之间,覆盖力测试设计如表7 所示。车辆行驶时,驾驶员在方向盘上施加一个力,以超过系统干预并离开车道,记录驾驶员在操纵过程中对方向盘施加的力。
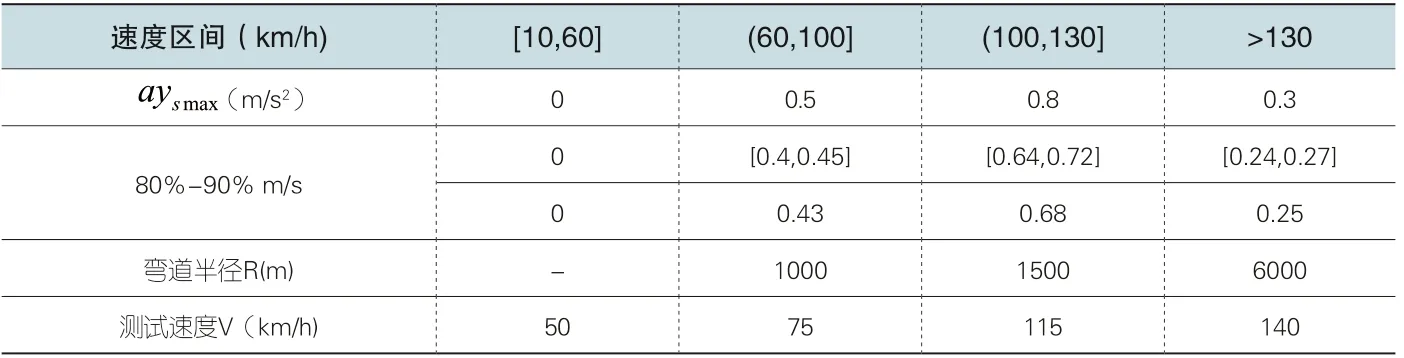
表7 覆盖力测试设计

4.5 C 类ACSF 测试
C 类ACSF 是由驾驶员激活,并沿着驾驶员指定方向进行横向移动(如:换道)的系统。


(3)覆盖力测试:测试流程与变道测试一致,驾驶人控制车辆保持直线行驶。记录驾驶员在在超越控制中对方向盘施加的力。测试结束后,车辆沿相反方向变道,重复进行测试。
(4)传感器性能测试:测试流程与变道测试一致,采用DGPS 的方法,测量主车尾端与目标车前端的距离,并记录车辆探测到后方来车时的两车距离。
(5)传感器失效测试:测试流程与变道测试一致,对被测车辆后方传感器进行遮挡。
5 结论
本文分析了当前有关自动驾驶测试标准国内外现状,对自动转向功能测试所需的各个测试项目做出了制定,提出了较为全面的方案。
在设计测试方案或制定标准时,应考虑国内多方面因素。我国应实时跟进新技术进展和国际标准动态,结合国内技术发展水平,同时,在制定自动转向测试标准时,以中国路试测试数据为基础,不断通过验证来完善测试标准。
通过对自动驾驶车辆进行自动转向功能测试方案的制定与未来测试的建议,有利于促进我国对智能驾驶车辆自动转向功能测试方案的制定,并加快更符合我国复杂状况的自动转向测试标准的出台。
