惯导RTK技术的定位原理和工程应用实践
2022-09-04张想平杨明光
张想平,杨明光
( 兰州市城市建设设计院, 兰州 730030 )
0 引 言
当前,实时动态定位(RTK)技术设备由于价格便宜,使用技术灵活,测量点之间不需要通视,测量成果能够满足四等及以下控制测量精度要求等特点,在地形图测绘、道路中线定测等工程测量领域得到了广泛的应用. 在实际应用中,由于测量对中杆倾斜会造成测量成果出现较大的误差甚至错误,因此测量时必须保持对中杆水准气泡严格居中,才能保证测量成果的正确性,测量过程费事费力. 随着科学技术的发展,利用中杆倾斜测量技术则无需保持其水准气泡居中就可实现快速精确定位,使RTK技术能够在较复杂环境中实现快速定位,大幅度减轻了测绘工作劳动强度,提高了工作效率和测绘成果精度. 目前对中杆倾斜测量技术主要有两类:一种是应用惯性导航系统(INS) RTK技术建立对中杆导航坐标系,并通过与地理坐标系之间的坐标转换来实现其倾斜误差自动补偿;另一种是通过“摇一摇”倾斜测量方法,通过晃动对中杆测量空间中多个点,以对中杆长度作为约束条件进行空间交汇计算出测量点的位置[1-2]. 论文主要论述INS RTK技术的定位原理和工程实际应用.
1 INS RTK技术的定位原理
所谓INS,就是通过载体内置的陀螺仪和加速度计测量载体的角速率和比力信息,应用数学积分运算得到载体的速度和位置信息,且不依赖于外部信息、也不向外部辐射能量的自主式导航系统. INS以测量运动体的加速度为基础,应用物理学中牛顿运动三定律的原理,将测量的加速度经过两次积分得到运动体的速度和距离等数据信息[3].
在INS RTK接收机天线中有一个惯性测量单元(IMU)器件,该器件由三个正交放置的陀螺仪和加速度计[4-12]组成,并自动形成一个INS坐标系. 该坐标系定义如下:原点位于IMU中心,三个陀螺仪分别指向INS坐标系的X、Y、Z轴并构成右手系[13]. 由于IMU能够随时测量出其运动状态信息,从而能够计算出在导航坐标系的姿态角和相对位置,并应用七参数法[14]进行导航坐标系与地理坐标系之间的坐标转换,解算出对中杆杆尖在地理坐标系的坐标值,这就是INS RTK技术的定位原理.
1.1 加速度测定
任何载体的运动状态都可以用加速度来表示.在INS中,由加速度计测得比力信息,通过应用牛顿运动三定律运算化简,当动坐标系取地理坐标系时加速度计算公式为

式中:fE为理坐标系中的比力分量;ω和ωx为陀螺仪角速度和其x轴坐标分量;vr为陀螺仪速度;g为重力加速度.
1.2 IMU相对INS坐标系中速度和坐标分量的计算
IMU的速度和坐标分量计算:在 IMU中,经过加速度对时间进行一次积分计算出其速度,通过二次积分计算出其在INS坐标系中的位置坐标分量. 由于考虑地球自传和运动载体运动速度的影响,加速度的计算相当复杂,不同坐标系的选取以及实现方法构成了INS坐标系的不同方案,有半解析式、解析式、捷联式等多种. 在解析式INS坐标系方案中,IMU在解析INS中的坐标分量的计算式为
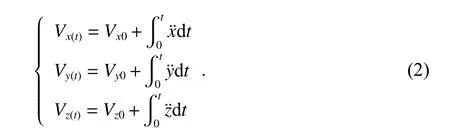
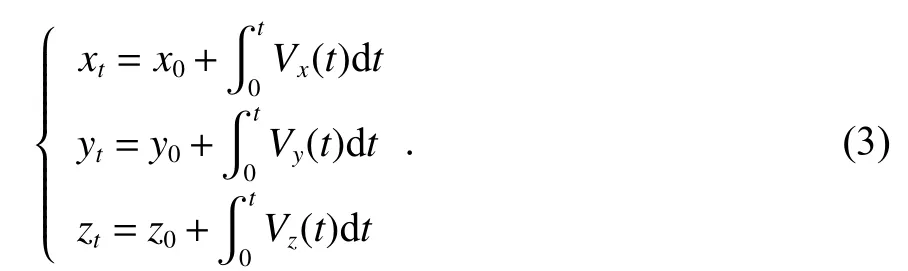
式中:Vx0、Vy0、Vz0为初始速度;x、y、z为IMU位移.
IMU相对INS坐标系中位置计算式为
1.3 导航坐标系与地理坐标系之间的坐标转换
应用式(3)只要计算出IMU在INS坐标系三个以上不同位置的坐标值,并通过全球卫星导航系统(GNSS)测得其在地理坐标系下的相应坐标,就可以应用七参数法解算出两者之间的坐标转换参数,从而实现任意点在INS坐标系和地理坐标系下的坐标转换,其计算公式为
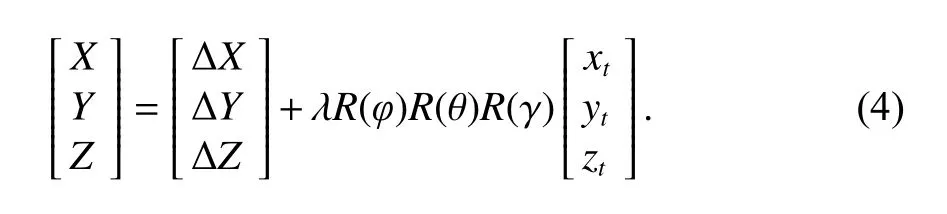
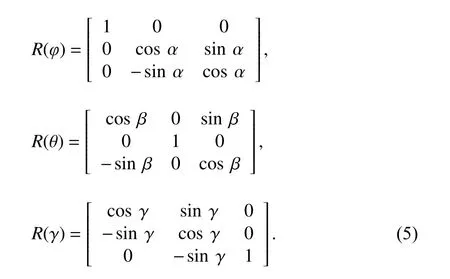
式中:Xt、Yt、Zt为RTK接收机相位中心在INS坐标系的坐标值;λ为尺度改正因子;α、β、γ为IMU的姿态角;X、Y、Z为对中杆杆尖在地理坐标系的坐标值.其中,
同时,由于RTK技术能够随时测出接收机天线相位中心的地理坐标系坐标,这就是INS RTK能够实现GNSS和INS点位容错算法,进行点位误差双检核的原因.
1.4 对中杆倾斜测量改正
当INS RTK测量过程中对中杆倾斜时,对中杆杆尖位置与接收机天线相位中心不在同一水平面位置,需要进行对中杆倾斜测量改正[15]才能测得正确的平面位置和高程测量成果. 设在地理坐标系对中杆杆尖A点的坐标为(xA、yA、zA),接收机天线相位中心(即IMU)B点的坐标为(xB、yB、zB),设对中杆长为D,则对中杆倾斜测量改正计算公式为

式中:α、β为IMU的姿态角;Δx、Δy、Δz为对中杆倾斜时在地理坐标系中的坐标增量.
2 工程实践应用
2018年10月,兰州市政府为进一步促进城市化进程,实施东扩和建设城市副中心战略,建设榆中生态创新城. 为扩大招商引资、改善投资环境,高起点规划和建设榆中生态创新城道路网新建工程势在必行,榆中生态创新城科创大道便是新建道路工程之一.
榆中生态创新城科创大道新建道路工程西起榆中经十六路,终点接新建道路科六街,为城市主干道,线路总长9.1 km,道路红线宽度70 m. 根据工程设计要求,需进行1∶500地形图测绘和道路中线定测.
韦俊贤表示,今年年底前康师傅将帮助康巴诺尔地区建立类似的蔬菜基地29.5万亩,将带动更多农民脱贫,康师傅也将为消费者提供更多绿色无公害的优质蔬菜。据悉,康师傅将以康巴诺尔蔬菜基地为样板,逐步建造更多产品原料种植基地,为当地农民提供从培训种植、采摘加工到企业收购的一站式服务。在精准扶贫的同时,也让企业供应链前移,进一步增强对原材料的把控能力。
该工程测区大部分区域为耕地,同时穿越宝兰客运铁路和化家营、詹家营等多个村庄,测绘时间紧、任务急. 为此,在测绘过程中,地形图测绘和道路中线定测都应用RTK技术进行,并分为华测中绘i90系列INS RTK技术设备1+5和徕卡 Viva GS16系列RTK(非INS)技术2+4两个小组进行,在进行坐标参数转换时,两种型号的RTK手薄均选用G001、G003、G008、G012、G015、G018等6个已知点. 通过计算,两种手薄坐标转换残差结果相同,平面转换残差为0.009 m,高程转换残差为0.018 m.
华测中绘i90系列INS RTK技术设备基准站和流动站之间能够实现内部网络通讯技术,基准站信号传输不受距离限制,且信号传输质量良好. 在应用INS RTK时,首先要进行INS RTK技术的初始化,其操作如下:在设置完基准站并使流动站实现固定解以后,在RTK手薄上点开INS测量按钮,根据提示信息,沿着流动站方向在摆幅30°范围内前后左右晃动对中杆,等手薄上显示RTK INS初始化完成后,应用徕卡 Viva GS16系列RTK非INS技术在已知点上架设三角架进行放样检校,并用华测中绘i90系列INS RTK设备用对中杆倾斜放样检核,在12个GNSS静态控制网点的检测结果如表1所示.
通过在已知点上的检测发现,应用两种型号RTK放样结果同已知点坐标较差的符合相一致,且大多数情况下应用INS技术的放样结果优于应用非INS技术的结果,两者均符合规范“一个同等级或高等级已知点检核,平面坐标较差不应大于7 cm”的要求.
为验证INS RTK技术的设备性能和测绘成果质量,在对低层房屋、树荫下和柱状地物等环境下对INS和非INS RTK技术在测量速度、信号质量和成果精度等方面进行了比较,结果如表2所示.
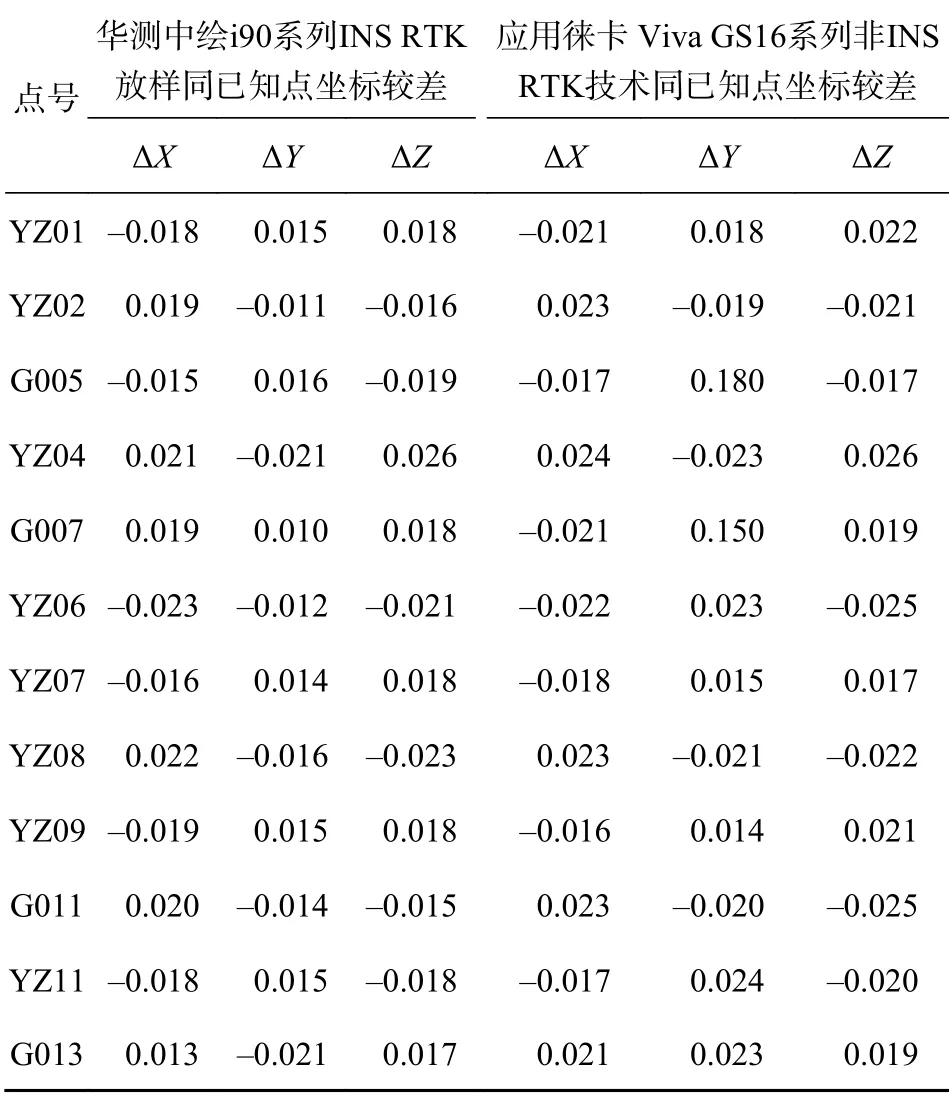
表 1 INS技术和非INS技术在已知点上放样结果进行比较 m
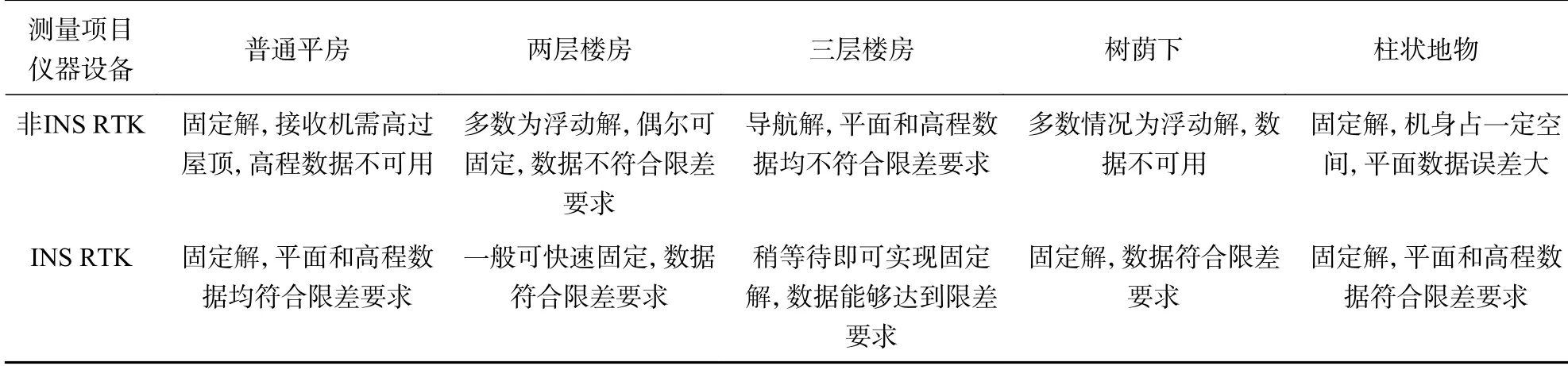
表 2 INS技术和非INS RTK技术在不同环境中测量过程比较
为了检测应用INS技术的测量成果质量,应用全站仪+笔记本电脑数字化测图技术对房角、通讯杆等地物共1 706个点进行了检查,检查结果如表3所示,没有发现粗差.

表 3 应用非INS技术的测量成果质量检测
在大量的工程实践应用中,通过同非INS技术RTK比较发现,INS RTK技术有以下技术优势:
1)大幅度提高了测绘成果精度:在测量通讯杆等柱状地物时,由于GNSS接收机机身占据一定的空间,其相位中心无法到达其平面中心位置,应用非INS技术测量存在很大的误差,而应用INS RTK技术时对中杆杆尖只要接触到地物点的表面即可;在测量有一定遮挡的地物点位时,应用INS RTK技术对中杆可以保持一定的倾斜度,测量信号质量更好;同时,RTK技术采用GNSS和INS点位容错算法,点位误差一般在5 cm以内,告别测量飞点,较大幅度提高了测绘成果的精度.
2)大幅减轻了测绘人员的劳动强度:应用INS RTK技术能够省时省力,比如在栏杆外旁边有一个井子,用非INS技术测量可能要绕一大圈距离,而应用INS技术只需将对中杆伸向栏杆外就可以测定;应用INS RTK技术测绘时,测绘人员随时可以保持轻松的工作姿态,在一些复杂的区域,测绘人员不必亲自前往地物点中心位置,只要对中杆保持一定的倾斜度,杆尖接触到地物点即可实现较高精度的测量,减轻劳动强度可达55%左右.
3)大大提高了测绘工作效率:比如在底层房屋测量中,应用非INS技术时测中杆必须保持与房屋的垂直,这样流动站短时间内不能实现固定解,甚至无法实现固定解;而应用INS技术时GNSS接收机可以偏离房角一定的距离,从而较快实现固定解;应用INS RTK技术测绘时一般不需要架设三脚架,对中杆不用严格对中,能够大幅度提高测绘工作效率. 实践证明,应用INS RTK技术提高工作效率可达30%以上.
4) GNSS与INS组合,增强了INS RTK技术在复杂环境中的抗干扰能力:由于GNSS向INS提供其有关的初始位置等信息,INS通过流动站接收机天线的角速率和比力等信息计算出其位移数据,因而在GNSS信号暂时受到高强度干扰时,INS系统可以独立地进行导航定位.
应用INS RTK技术时要注意以下两点:一是对中杆的倾斜度有一定的范围,如华测中绘i90系列INS RTK技术,要求对中杆与地面水平角≥60°,如果超出范围,测量精度将会大大降低;二是在测量较高的楼层房角等地物时虽然会很快实现固定解,但在采集时稍微等待一定的时间,等待固定解跳动变化稳定时再进行采集,否则测量结果误差较大.
3 结束语
INS RTK技术有效解决了对中杆倾斜造成的测量误差问题,改变了人们传统的测绘作业习惯,该技术能够在较复杂环境中实现快速定位,作业中流动站一般不需要架设三脚架,测绘工作变得省时省力,精度和效率得到了较大提高. 随着该技术的进一步发展,该技术在测量各个领域会得到更广泛的应用.
