基于汽车油门防误踩系统的障碍识别研究*
2022-09-03王力斌
王力斌
(辽宁工程职业学院,辽宁 铁岭 112000)
汽车油门防误踩系统作为主动安全系统中的重要组成,可智能识别驾驶员对汽车油门踏板的操作意图,当系统辨识到驾驶员误踩油门踏板时,将对汽车进行紧急制动,以保证驾驶员的人身安全。根据对汽车油门防误踩系统控制方案的研究,本文确定了利用模糊推理算法,对障碍距离、车速、油门踏板加速度3 个主要信号进行计算分析,综合判定驾驶员对油门踏板操作意图的控制思路。对于障碍的识别决定了该系统对驾驶员操作意图的判定准确率。
1 障碍识别
目标车辆与障碍车辆间的最小安全距离为汽车油门防误踩系统的重要辨识参数,本文对最小安全距离按绝对安全距离计算方法进行计算,其公式为

式中:u0为汽车初始运行速度;τ′1为驾驶员由有制动意愿到执行制动的生理反应时间;τ″1为脚步移动到制动踏板上所需时间;τ′2为驾驶员踩下制动踏板到制动片与制动盘相接触所用的时间;τ″2为制动力由最小增加至最大所用的时间;abmax为最大减速度。

式中:φp为路面峰值附着系数,其大小与路面情况相关。本文列举沥青路面与混凝土两种路面在干、湿两种路面状况下的峰值附着系数(见表1)。

表1 两种路面在不同路面状况下的峰值附着系数
按我国高速公路一般最大限速为120 km/h 作为最大车速,对最小车速到最大车速进行计算,可得到不同路面状况下,不同车速时的制动距离。图1为车速为0~120 km/h 的最小安全距离。

图1 车速为0~120 km/h的最小安全距离
通过计算可知,汽车在120 km/h 时进行紧急制动,其制动距离为96.5 m。因此,测距传感器的量程应超过100 m。通过对比各类型测距传感器,最终选择检测精度较高、响应速度快、适应能力强且工作稳定性高的毫米波雷达测距传感器。毫米波为微波中的一种,是在电磁频谱中波长为1.0~7.5 mm的电磁波,其对应的频率为40~300 GHz[1]。毫米波雷达测距传感器检测的距离可根据测距传感器发出信号开始到接收到反射信号过程中所用的时间与光在空气中的传播速度进行计算,计算公式为

式中:c 代表光速;Δt 代表信号往返时间。
当汽车行驶时,在正常车距下测距传感器的检测范围应可覆盖整车宽度,这样系统才能准确地判断驾驶员是否有误操作。测距传感器的探测角度为

2 DBSCAN 聚类算法
DBSCAN 聚类算法是一种基于密度的聚类算法。它可将多个检测目标定义为多相连点的密度集合,再将具有足够密度点的集合划分为多个簇,以此来辨识多障碍目标。DBSCAN 聚类算法事先不需要定义将要检测簇的数量且无形状约束[2]。
DBSCAN 聚类算法中的两个主要参数为EPS 及Mupts,其中EPS 为以某核心对象为轴心的超球面邻域半径;Mupts 为邻域内最少点数阈值。通过EPS 及Mupts,DBSCAN 聚类算法将数据对象分为以下3 类:一是核心点。当某一数据对象处于以EPS 为半径的邻域范围内,且其拥有数据点数量大于Mupts,那么该数据对象为核心点。二是边界点。当某一数据对象处于以EPS 为半径的邻域范围内,但其拥有数据点数量小于Mupts,那么该数据对象为边界点。三是噪音点。当某一数据对象处于以EPS 为半径的邻域范围外,该数据对象既不是核心点,又不是边界点,那么称其为噪音点。
当某一数据点处于核心点的邻域范围内,那么就说该点从核心点发出为直接密度可达。如果某一数据对象{P1,P2,…,Pn},Pi+1是从Pi关于(EPS,Mupts) 直接密度可达,则表示数据对象中任意数据Pi数据可达。如有数据a 和数据b,均从核心点O 密度可达,那么数据a 与数据b 数据相连,且其具有对称性。核心点与其所有密度可达的数据对象组成的集合为密度聚类簇。当进行障碍辨识时,根据不同障碍的外形、尺寸,会出现不同的检测点数,产生不同的密度聚类簇。
能源互联网不是能源系统的简单互联,也不仅仅是能源系统的信息化,能源互联网是在智能电网的基础上,利用互联网思维与技术改造传统能源行业,实现横向多源互补、纵向“源-网-荷-储”协调、能源与信息高度融合的新型能源体系。目的是大幅度提升能源系统效率、促进商业模式创新、支撑绿色发展理念,如智慧城市、生态园区、绿色乡村、智能家居等[34]。
通过MATLAB 模拟,建立随机1 000 个数据点,对其进行聚类辨识,其结果见图2。通过DBSCAN 聚类算法,可精准地辨识目标车辆前方障碍的宽度及形状特性,根据形状特性及相对速度,结合位置跟踪所辨识到的相对位置,来判断驾驶员对油门踏板的激烈操作是否为超车操作行为。当两车车距较小,目标车辆车速快于前方障碍车辆,且相对位置不符合超车操作标准,此时驾驶员对油门踏板的激烈操作将被辨识为误踩油门踏板,汽车油门防误踩系统将对汽车进行紧急制动操作,保证驾驶员的安全。当目标车辆姿态符合超车操作标准,且前方无障碍,此时,系统认定驾驶员对油门踏板的激烈操作为超车操作行为,不对其进行制动干预。

图2 随机数据点通过DBSCAN聚类算法的MATLAB仿真
3 位置跟踪
虽然毫米波雷达测距传感器对运动物体的检测能力非常出色,但是在实际工作过程中,由于路面状况、颠簸、漫反射等因素,使检测过程中出现干扰。这些随机出现的干扰会使毫米波雷达测距传感器输出信号出现失真情况,该情况会使汽车油门防误踩系统对障碍距离、位置、车速等信息出现随机性误报,系统一旦利用错误信息进行驾驶员操作意图辨识,后果不堪设想。因此,利用卡尔曼滤波算法降低干扰、提高毫米波雷达测距传感器对障碍位置跟踪的准确性。从而,在超车等工况下,保证系统对驾驶员操作意图的辨识准确性。
卡尔曼滤波算法是一种利用线性系统状态方程,通过对物体状态实际检测值及某一时刻时对下一时刻物体状态估计值进行数据融合的算法。它能将检测噪音干扰进行过滤,并能对采集数据进行时时更新和处理,使检测值更加精确。卡尔曼滤波算法是目前应用最为广泛的滤波处理算法,在雷达、导航、制导、控制等方面得到广泛应用。
毫米波雷达测距传感器检测障碍的模型为

式中:A 为常量;X(k)为状态矩阵;N(k)为噪声干扰矩阵;Z(k)为观察量矩阵;W(k)为0 值白噪声观测误差矩阵。预测方程为


式中:σn为过程噪声方差。卡尔曼增益为

式中:σ 为观测噪声方差。卡尔曼滤波方程为

卡尔曼滤波误差方差为

通过MATLAB 进行仿真,仿真结果见图3。
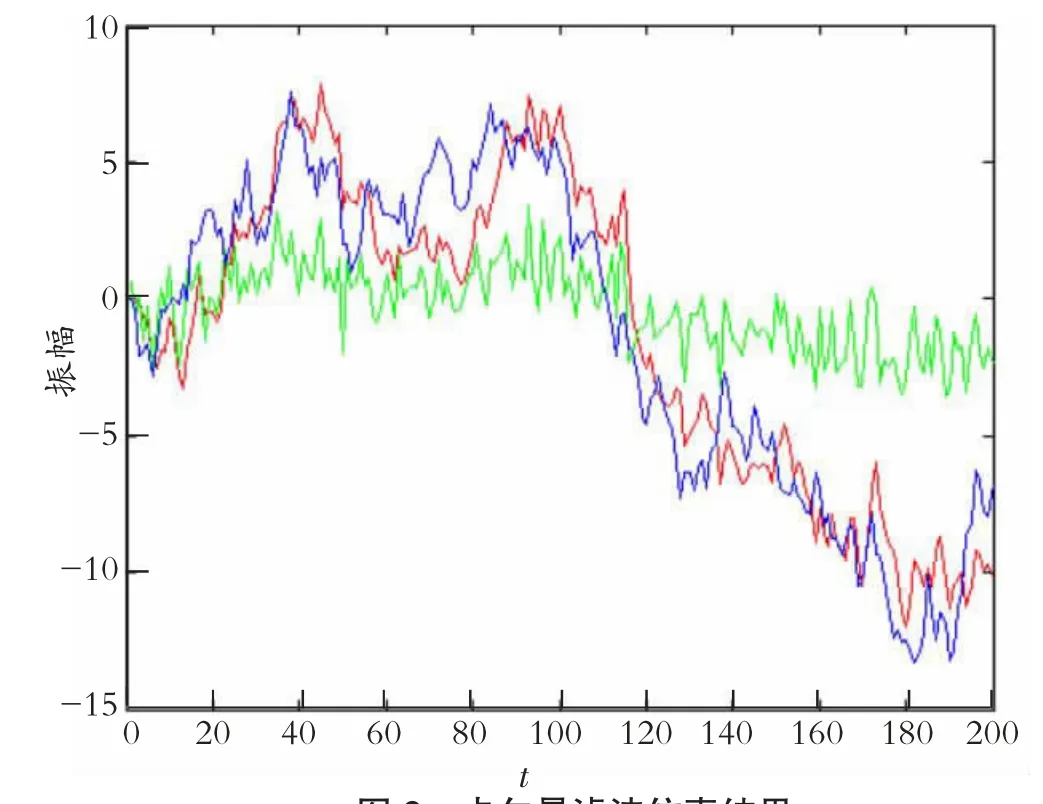
图3 卡尔曼滤波仿真结果
通过卡尔曼滤波算法对实际检测值与预测值进行综合分析计算,最终得到降噪后的稳定信号输出值。通过图3 可看出,其降噪效果非常明显,满足汽车油门防误踩系统障碍跟踪识别使用需求。
在实际工作中,汽车油门防误踩系统对毫米波雷达测距传感器所输入的数据进行实时更新,利用卡尔曼滤波后的数据不断判断障碍运动轨迹,得到最为准确的障碍信息,并将所检测到的车距信息划分为5 个区间,分别为S1{0.5~5.5 m};S2{5.8~14.9 m};S3{15.5~28.7 m};S4{29.5~69.5 m};S5{70.8~96.5 m},并将其依次定义为“非常危险”“危险”“较危险”“较安全”“安全”的模糊集,使其与车速与油门踏板加速度模糊集共同输入模糊控制器,通过模糊控制规则进行计算,以此来辨识驾驶员操作意图。通过MATLAB 对基于模糊控制的汽车油门防误踩系统进行仿真,可得到以下仿真结果和辨识结果,见图4。
通过图4 可看出在不同情况下的模糊控制器对驾驶员操作意图的辨识结果,系统据此进行判定。
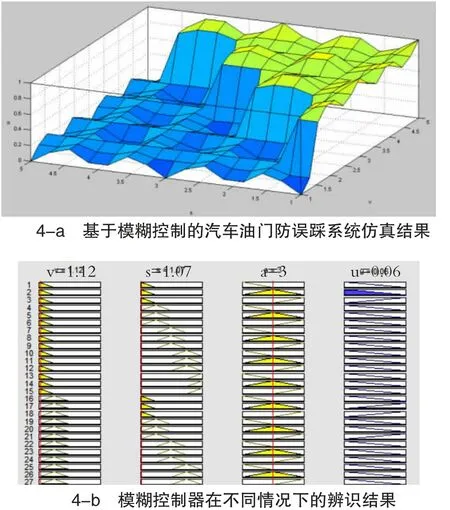
图4 基于模糊控制的汽车油门防误踩系统仿真结果和辨识结果
图4 -b 第1 条信息中,当输入车速信号参数为非常危险、车距输入信号参数为非常危险、油门踏板加速度输入参数为安全时,说明驾驶车辆车速较快,车距非常小,但驾驶员并没有踩下油门踏板,此时系统判定驾驶员没有对油门踏板进行误操作。
图4-b 第2 条信息中,当输入车速信号参数为非常危险、车距输入信号参数为非常危险、油门踏板加速度输入参数为非常危险时,说明驾驶车辆车速较快,车距非常小,且驾驶员狠踩油门踏板,此时系统判定驾驶员对油门踏板进行了误操作,对汽车油门防误踩系统中的机械执行机构发送紧急制动信号,对汽车进行紧急制动,以保证驾驶员的安全。
4 结束语
通过对汽车油门防误踩系统的仿真可看出障碍信息对于汽车油门防误踩系统的重要性,如障碍信息采集不准确,极有可能引发系统的误判,从而造成交通事故。利用DBSCAN 聚类算法结合卡尔曼滤波算法,极大地提高了障碍信息的精度,有效提高了障碍信息的精确度,从而提高了汽车油门防误踩系统的判定准确率。
