果树施肥机器人的关键技术研究
2022-09-03郭洪宇姜利鹏邵奥利王伟鹏
郭洪宇 , 姜利鹏 , 王 乐 , 邵奥利 , 王伟鹏
(吉林农业大学工程技术学院,吉林 长春 130118)
对果树精准有效施肥,能给果树生长提供养分,是果树产量形成与品质提升的重要保障[1]。农业智能机器人可以实现智能育种、作物去雄、病虫害监测、农业电力巡检等,将智能机器人技术应用于果林生产,能减轻果农的劳动负担,可让果农以更加智能高效、轻松简单的方式管理果园,提高收入,帮助果农在作物生产过程中减少农药化肥使用量,有效解决土壤污染和农产品农药残留等问题。而果树施肥机器人通过智能化、集约化的方式进行施肥,可以提高施肥效率和施肥精准度。
1 研究背景
果树施肥机器人的开发具有巨大的经济效益和广阔的市场前景,符合未来农业的发展趋势。我国是农业大国,农作物的精准生长越来越重要,精准、智能施肥的需求不断增加。而目前对农作物施肥的普遍方法是撒播式施肥,大量撒施会造成肥料的浪费,作物没有吸收的、多余的肥料会渗入地下,污染水源,进而影响环境,也容易造成土壤板结。果树施肥机器人可以智能识别作物,实现自主精准施肥,因此,有关果树施肥机器人的研究越来越重要[2]。
2 研究意义
肥料的精准播撒不仅可以提高果树的吸收利用率,而且还可以提高果树成果的质量和果树的产量。果树施肥机器人之所以具有较高的施肥效率,是因为它可以在实际作业中对每一棵果树进行精准施肥,在新型技术的辅助下,能替代人工进行作业,提高作业效率。与传统的施肥方式相比,果树施肥机器人在复杂多变的作业环境中,能通过感知信息进行作业,如果树机器人可采用超声波测距原理判断树根位置,实现精准施肥,提高肥料的利用率。果树施肥机器人通过智能化、集约化的方式,可使施肥效率和施肥精准度达到一个新的高度,实现果园施肥的自动化和智能化。在实际使用中,果树施肥机器人的施肥模块高度可以调节,适用于绝大多数果树,如橘子树、苹果树和樱桃树等。
3 常见的果树施肥方法
按照施肥原理,果树的施肥方式主要分为叶面喷肥、注射施肥、土壤施肥、水肥一体化、草肥覆盖5种类型,具体分类如图1所示[3]。果园不同施肥方式的示意图如图2所示。

图1 果园施肥方法
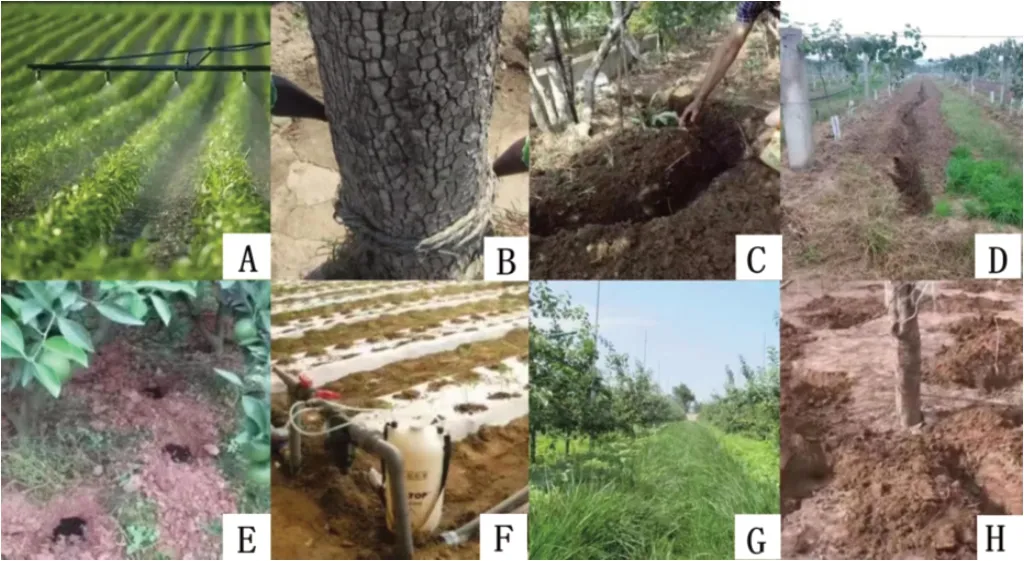
图2 果园不同施肥方式示意图
4 果树施肥机器人的关键技术
果树施肥机器人是一种集合路径动态规划、行为控制、视觉识别、环境感知等多功能于一体的精准高效施肥的农业技术设备[4]。果树施肥机器人的系统组成如图3所示。一台完整的果树施肥机器人主要包括头脑、神经、心脏、五官、手脚等部分。欧阳真[5]提出了一种智能果树施肥机器人,通过视觉识别装置识别果树的树根部位,红外接收模块接收外部识别出来的信息,传到STM32单片机主控板,STM32单片机主控板命令施肥机构转动,使肥料从滑道滑下,落至树根部位置。对第一棵果树施肥之后机器人根据所收集的地面信息进行循迹,超声波测距模块判断前方是否有障碍物,依次对所有果树进行精准施肥,实现果树智能施肥。

图3 果树施肥机器人的系统组成
1)行走控制技术。果树施肥机器人的行走控制技术是其实现多方位运动控制的关键技术,对于整个施肥作业过程中的平稳运行起着至关重要的作用。近年来,果树施肥机器人正向着智能化、精确化、高效化的方向逐步发展,进而对行走控制技术也提出了更高的要求。同时,全闭环交流伺服驱动技术、嵌入式运动控制系统技术、运动控制卡技术、模糊控制技术等新型控制技术在实际生产中的应用对果树施肥机器人的发展和推广起着重要的作用。
2)循迹定位技术。循迹定位技术是果树施肥机器人实现精准高效施肥的关键。在各种导航定位方法中,如GPS导航、计算机视觉导航、计算视觉定位导航技术均有非常多的优点。当前对果树施肥机器人的循迹定位研究主要集中在视觉识别和GPS导航这两种方式上。同时,我国研发的北斗导航精确度越来越高,在果树施肥方面将会产生引导性作用。
3)传感器避障技术。果树施肥机器人在农田进行实际作业时,工作环境较为复杂,作业对象不确定性较高,同时不同果树的施肥情况不一样。因此,传感器在这个过程中起到至关重要的作用。现有的果树施肥机器人传感器主要包括触觉传感器、视觉传感器、超声波传感器等[6]。传感器设置在外界环境与果树施肥机器人的连接位置,是其获取实际环境实时情况的重要途径。果树施肥机器人在工作时实现循迹、定位和路径规划等功能时均依赖于传感系统。随着技术的发展,不断开发和应用更多传感器融合技术是提高果树施肥机器人精准施肥、环境适应能力的有效措施。
4)智能学习技术。鉴于果树施肥机器人工作环境的多样性与复杂性,进行相应的数学建模比较困难,因此,果树施肥机器人应该向着智能化的方向发展,而智能化果树施肥机器人的技术关键是在模糊控制于神经网络控制的自适应性和自主学习能力。同时,果树施肥机器人可以在人为的协助下不断地学习,逐渐形成自身处理复杂情况的知识系统,从而使其更具有实用价值[7]。
5 果树施肥机器人研究存在的问题与对策
我国对于果树施肥机器人的研究起步比较晚,与发达国家相比,在技术方面仍存在差距。果树施肥机器人的发展还需要结合具体的实际作业环境,同时兼顾实用性、先进性、经济性等,研发出符合我国果树需要的施肥机器人[8]。
1)存在的问题。目前,在果树施肥机器人的实际应用中主要存在的问题有两方面:①果树施肥机器人的智能化水平有待提高。在实际农业生产中,果树生长特点、环境条件等均有不同,因而对于果树施肥机器人的智能施肥有较高要求。例如,需要果树施肥机器人对于田地间的障碍物具有敏捷的避障能力。同时,对不同环境果树施肥时,其对施肥位置需要有较强的辨识能力。当前专家对于果树施肥机器人研究的重点也逐渐从其他机械化的组成部分转移到果树施肥机器人的智能化方面,同时在其他技术方面也进行了相应的改进,如对施肥时摄像头识别定位以及机器人自动循迹等方面进行了处理。但总体来看,目前我国在果树施肥机器人智能化方面的研究仍存在一定的缺陷,影响了当前水果等农副产品的生产与发展。②果树施肥机器人的制作成本较高。目前,我国对果树施肥机器人的研究中大多数是针对某一种果树的某一生长期来进行研究,在实际生产过程中存在效率低、使用针对性强的问题。这使得果树施肥机器人的生产制造成本大大提高,不利于果树施肥机器人的推广,导致果树施肥机器人在当前果产品生产中很难大范围进行使用。
2)应对措施。应加大对果树施肥机器人的研发支持力度,引导果树施肥机器人向着智能化、自动化、精准化的方向发展,最终实现产业化,并进行推广应用。①可以通过长时间的探索,归纳总结果树施肥的最佳作业方法,提高水果等农副产品的质量与产量。②果树施肥机器人不仅要对目前人工种植的过程进行实际模拟,而且还应该融入当下难以实现机械自动化的领域。在果树施肥机器人的设计与制造过程中应保证其统一性与规范性,从而降低其生产成本,使其能够更广泛地应用于实际生产中[9]。③在果树施肥机器人的设计中尽可能实现一机多用的功能,以提高施肥时的作业效率,解放劳动力,同时降低其制造成本,进而产生更好的经济效益。
6 结语
综上所述,随着互联网技术、循迹定位技术以及传感器避障技术等科学技术的发展,果树施肥机器人应该具有开放式结构、良好扩展性、通用性和柔性作业的能力,从而优化机器人功能,降低其生产成本,真正实现普及和应用。如可以通过更换相应机械结构与末端执行器来适应不同类型的果树,实现一机多用的功能,进而提高果树施肥机器人的作业效率;不断优化果树施肥机器人的各部分结构与功能,向着小型化、轻量化的方向发展;进一步对视觉识别系统、图像采集和处理的算法深入研究与探索,同时配合灵敏度较高的传感器使用,从而改善其避障能力,达到作业过程中的智能化、自动化、精准化的目的[10];引入柔性材料、纳米材料等新材料技术到果树施肥机器人领域,促进对果树无损伤作业技术的发展。以使果树施肥机器人能够为产业的发展提供更多帮助,提高水果的产量与质量。
