基于互相关分析的桥梁应变传感器故障诊断
2022-09-02刘张浩秦小平易航宇刘怀林
刘张浩,秦小平,李 力,易航宇,刘怀林
(1.招商局重庆交通科研设计院有限公司,重庆 400067;2.重庆物康科技有限公司,重庆 404100;3.桥梁工程结构动力学国家重点实验室,重庆 400067)
为避免桥梁、隧道、地铁等重要基础设施发生事故时造成重大生命与财产损失,这类设施多布置了安全监测系统,通过各种传感器对基础设施运行状态进行动态监测,并适时给出预警和评估[1-2]。但大型基础设施布置的传感器数量众多,且一般传感器工作环境复杂,易受温度、湿度和电磁环境等的影响,会出现故障、性能的衰退甚至失效,致使采集数据出现失真甚至错误,这对后续的预警评估系统带来严重影响,产生误诊断、误报警,甚至造成不可估量的损失[3-7]。
根据数据处理方式不同,传感器故障诊断方法分为3类[8]:基于模型的方法[9-10]、基于信号处理的方法[5-7]和基于知识的方法[11-15]。其中,基于信号处理的方法[7]目前应用最广。杜海莲等[15]提出了基于主元的故障诊断法,把多个传感器的数据进行分解,形成主元和残差2个空间,对残差在空间上进行投影,从而获取故障信息。胡顺仁等[5]通过分析桥梁传感器故障演变过程,建立了数据标准化残差模型,根据残差偏离量的取值对故障进行判定和故障时间定位。安星等[7]提出累积残差贡献率和加权统计量对传统的主元分析方法进行改进,实现对传感器故障的快速诊断,同时提出了分时段检验的方法,将改进的主元分析用于实际桥梁健康监测系统的传感器故障诊断,但并未指出常见传感器故障识别方法。
综上所述,现有基于信号处理方法的传感器故障分析侧重于对常见故障诊断,但缺少对常见故障的识别,不利于实际监测中对传感器故障的快速处理。针对这种情况,本文拟建立一种基于传感器统计数据的分析方法,用来快速诊断传感器故障及常见故障识别;通过研究常见故障下关联传感器互相关系数,提出了基于互相关分析方法的传感器故诊断理论和识别故障算法,并进行故障诊断和定位精度分析。
1 故障建模和识别方法
1.1 互相关系数计算方法
互相关分析是从“能量”的角度来评价不同信号之间的相关程度,是一种信号处理方法。设信号xn和yn,取某个适当的数α,使xn和αyn(N1≤n≤N2)相接近。能量可以表示为:
(1)
为了使能量Q达到最小,需满足dQ/dα=0,可得到:
(2)
计算可得到:
(3)
将α代入Q可得到相对误差的能量:
(4)
ρxy(N1,N2)即为xn和yn在范围[N1,N2]上的互相关系数。当ρxy接近1时,相对误差能量较小,xn和αyn比较相近。因此可通过互相关系数判断2个变量的相关性。
1.2 应变传感器常见故障及互相关系数表现特征
在实际工程中,应变传感器常见的故障主要有 4 种:常值故障、固定偏差、精度下降、线性偏差[16]。其中常值故障是指传感器数值保持不变;精度下降故障是指传感器测量值从某一时刻开始与真实值存在一定的偏差,这个偏差值随时变化;固定偏差故障是指传感器测量值从某一时刻开始与真实值之间保持一个恒定的偏差,但是测量值与真实值的变化趋势保持相同;线性偏差是指传感器测量值从某一时刻开始逐渐偏离真实值,偏移值呈线性变化趋势,使得测量值与真实值的差值逐渐增大。
为了探究不同故障下传感器互相关系数表现形式,选取某大桥结构健康监测系统数据库中的 2组互相关应变传感器(记为第1组数据和第2组数据),每组数据有2个(记为A传感器数据和B传感器数据)。采集时间是 2021 年 4月 2 日 —4 月 9 日,采样周期 10 min,共计900个数据点。模拟故障点是在第601个数据点加入,窗函数为100。无故障时计算的互相关系数如图1所示。从图1可以看出,当传感器无故障时,2个传感器之间表现出较强的相关性,互相关系数在0.95~1之间波动。通过对近3万个数据点分析,发现传感器无故障时互相关系数均大于0.9,因此选择互相关系数0.9为阈值。

(a) 第1组数据
常值加噪音故障下A、B传感器相关系数演化如图2(a)所示。试验中,将传感器在601个监测点之后数据保持不变的基础上增加一个信噪比为10的噪声干扰。从图2(a)可以看出,在此故障下互相关系数在00.3附近波动。这是因为在这种故障下A传感器和B传感器数据本身的关系较小,所以互相关系数低。

(1) 第1组数据
精度下降故障下传感器相关系数演化如图2(b)所示。试验中,将传感器在601个监测点之后增加一个信噪比为10的噪声干扰,模拟工程中的精度下降。从图2(b)可以看出,在此故障下互相关系数在0.3~0.8之间,这是因为在噪声干扰下会降低2个传感器的相关性,但不会完全使2个传感器不相关,因此相关系数整体较高。
固定偏差下传感器相关系数演化如图2(c)所示。试验中,将传感器在601个监测点之后减去一个常数值来模拟工程中的固定偏差,图中选取的固定偏差为5 με。从图2(c)可以看出,互相关系数在发生故障前和发生故障后的一段时间均高于0.9,而在发生故障时,互相关系数会急剧降低。这是由互相关系数计算原理决定的,当2组数据中某一个数据发生固定偏差时,故障前后一段范围内互相关系数不发生变化,而在故障点附近,由于窗函数的影响,互相关系数会降低。
线性漂移故障下传感器相关系数演化如图2(d)所示。试验中,将传感器在601个监测点之后增加一个随时间线性变化的数值来模拟工程中的线性漂移问题,图中选取的漂移速度为0.05 με/10 min。从图2(d)可以看出,在故障之后,相关系数在0~1之间变化,没有明显规律。
为了便于与其他故障识别,利用互相关系数变化特性,人为的在正常的数据处加入随时间线性变化的函数,结果如图3所示。从图3可以看出,引入线性偏移后,在第601个故障点之后,互相关系数明显大于未引入前,且大部分大于0.9。其中,该变化趋势不受故障加入时间的影响。

(a) 第1组数据
1.3 基于相关系数的故障识别的方法与定位技术
数据分析可知,在应变传感器正常工作时,互相关系数一般都大于0.9,因此可将阈值设为0.9,当互相关系数小于0.9时,认为传感器存在故障。而不同故障下传感器互相关系数表现形式不同,通过分析互相关系数的演化规律进一步进行传感器故障识别。算法的主要思路如图4所示。

图4 算法的框架Fig.4 Structure of the algorithm
2 故障判断精度和定位误差
为进一步探究基于互相关分析方法的应变传感器故障诊断精度,利用第1组传感器采集的监测数据,在每种故障下分别设计了不同工况。
1) 常值故障加噪音
应变传感器的常值故障具有随机性,会发生在任何应变值下。为进一步探究常值故障发生时应变取值对传感器故障识别和定位的影响,根据传感器真实测量值的范围,分别分析了发生故障时应变在6.7 με~30.7 με(应变间隔为3 με)下传感器的故障识别和定位误差,结果如图5和表1所示。从图5和表1可以看出,应变在不同取值下,都可判断出传感器是否发生故障,且定位误差在15~50个之间。定位误差主要受到发生故障之前数据变化的影响。

表1 不同应变下的定位误差Table 1 Positioning errors under different strains

图5 定位误差与故障发生时应变的关系Fig.5 Relationship between location errors and strain at fault occurrence
2) 精度下降
为进一步探究精度下降程度对传感器故障识别和定位的影响,设计了信噪比从27.5下降到7.5的8种工况,信噪比取值间隔为2.5。传感器故障定位误差结果如图6和表2所示。从图6和表2可看出,在信噪比大于25时,此时噪音较小,利用互相关系数未能判断故障;当信噪比小于22.5时,利用互相关系数为0.9的阈值可正确判断故障;信噪比小于12.5时,定位误差明显减少。

图6 定位误差与信噪比的关系Fig.6 Relationship between positioning error and SNR

表2 不同信噪比下的定位误差Table 2 Positioning errors under different SNR
3) 固定偏差
已有研究表明,固定偏差的大小会直接影响故障的诊断,因此设计了不同的固定偏差,结果如图7和表3所示。从图7和表3可以看出,当偏差值为3 με~5 με时没有检测出传感器故障,而当偏差值为6 με~10 με时可成功检测出故障,且定位误差随着偏差值增大呈逐渐减小趋势。

表3 不同固定偏差大小下的定位误差Table 3 Positioning errors under different fixed deviation
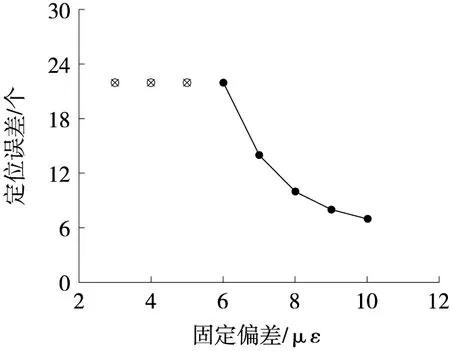
图7 定位误差与固定偏差大小的关系Fig.7 Relationship between positioning errors and fixed deviation
4) 数据漂移
为进一步研究漂移速率对传感器故障识别和定位的影响,分别设置漂移速率从 0.01 με/10 min 到 0.1 με/10 min,间隔0.01 με/10 min,共计 10 组试验,采集间隔时间为10 min,传感器故障定位误差结果如图8 和表4所示。从图8 和表4可以看出,当漂移速率大于0.03 με/10 min时可进行故障识别,且定位误差随着漂移速率增大呈逐渐减小趋势。
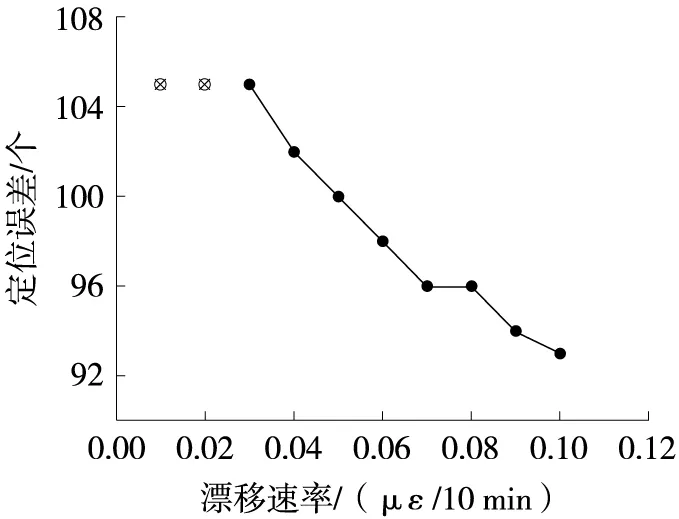
图8 定位误差与漂移速率大小的关系Fig.8 Relationship between positioning error and drift rate

表4 不同固定漂移速率下的定位误差Table 4 Positioning errors at different solid drift rates
为进一步确定数据量与计算时间的关系,利用Python编写相关算法。当仅考虑数据计算和分析时间,不考虑数据导出和绘图时间时,3 000~30 000个采集数据的计算时间如图9所示(如果采样间隔为10 min,换算为采集时间为500 h~5 000 h)。随着数据量的增加,计算时间大致呈线性增加,且一组数据的计算时间在8 s之内。

图9 采集数据量与计算时间的关系Fig.9 Relationship between the amount of collected data and the calculation time
3 结束语
通过对常见故障下关联传感器互相关系数进行研究,构建了基于互相关分析方法的传感器故诊断识别方法,并分析了故障精度和定位误差,主要得出以下结论:
1) 基于互相关分析方法的传感器故诊断识别方法是通过数据统计方法,不需构建复杂的模型,计算速度快,提高模型的实用性。
2) 当传感器发生故障时,互相关系数会发生变化,可判断传感器是否发生故障,且不同故障下传感器互相关系数表现形式不同,可根据这一现象识别常见故障类型。
3) 本文提出的方法和精度计算是基于桥梁应变传感器的监测数据,可同样用于桥梁其他传感器故障诊断,如位移传感器、变形传感器等。
值得说明的是,本文提出的传感器故障识别方法是基于假设桥梁结构完好,没有出现明显损伤。这主要是因为桥梁结构损伤通常是累积损伤,需多月甚至数年才有明显变化,而传感器发生故障的时间尺度远小于结构损伤的时间跨度,所以未考虑桥梁结构损伤对传感器故障时的影响。在之后的研究中,可进一步探究如何去掉此假设,并准确辨别传感器自身故障和结构损伤。
