多源监测技术在复杂环境下水下地形测量中的应用
——以西沪港为例
2022-09-02孙伟
孙伟
(宁波海洋研究院,浙江 宁波 315832)
1 引 言
水下地形测量是我国地形测量的重要内容之一。随着,陆地地形测量的逐渐完善,水下地形测量的普查成为未来国家基础测绘事业的重点关注对象。随着测绘科学技术的不断发展,越来越多的高新技术被应用到水下地形测量当中。
水下地形测量主要包括平面定位测量和水深测量,已形成了采用GPS技术获取平面坐标和测深仪获取深度数据的基本测量模式[1]。围绕这一基本测量模式,诸多学者在改善平面坐标和测深数据获取精度,平面-测深协同监测方面和水下地形精细化测量方面开展了大量的研究。
在改善平面坐标和测深数据获取精度方面,赵保成采用GNSS-PPK技术克服了传统卫星定位法在山区狭窄河道水下地形测量中作业半径小和定位精度差等问题[2]。孙月文采用GNSS技术进行了杭州湾强潮海域水下地形测量,有效降低了潮差、潮流急等对测量精度的影响,克服了传统手段的局限性[3]。
在平面-测深协同监测方面,文小勇和林向阳尝试采用GPS-RTK-测深仪协同探测技术进行水下地形测量,并通过对比分析证明了该技术的可靠性[4,5]。蒋宝平和石晓春分别提出了提升声速和断面平移法,改善GPS-RTK-测深仪协同探测技术测量精度的思路[6,7]。
在水下地形精细化测量方面,郑晖采用多波束和侧扫声呐进行水下勘测,充分利用了两种技术各自的优势,实现了水下地形数据和水底地貌影像的精确提取[8]。崔立军和王庆洋分别采用多波束测深系统和单波束测深系统进行水下地形测量,能够实现复杂环境水下地形精细化探测[9,10]。
由上文可知,多种监测技术的协同监测将是未来水下地形精细化测量的必然趋势。但是,关于浅水区和沼泽区的全覆盖、无盲区大比例尺水下地形测量研究较少,尤其缺乏合理有效的监测体系[11]。本文拟采用海陆空一体化测量方法监测西沪港水下地形测量,以期得到其精细化水下地形图,为该区域的经济发展提供数据服务。
2 西沪港概况及地形测量技术需求分析
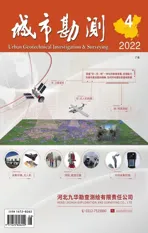
象山港位于宁波市东南部,为东北-西南对角线走向的狭长形半封闭港湾,港内风平浪静,水质上佳。其中,西沪港是象山港三大内港之一,是象山半岛滩涂面积最大的内港。为了了解和分析工程区海域地形变化特征,为相关论证专题提供最新海域地形基本资料,本文拟对西沪港海域进行水下地形测量,测量面积约为 49.0 km2(水域约 34.0 km2,盐沼约 15.0 km2),如图1(a)所示。
西沪港水下地形测量不仅包括深水区,还有盐沼、泥滩、渔网和养殖区等浅水区。大潮低潮时,泥滩从岸边向海中可露出 5 km左右,在区域西面则是一片大盐沼。由于滩涂面积较大、分布较广,且高潮没水、低潮露滩,无法采用常规手段进行地形测量。
经现场勘查和综合考量,在浅水区采用乘潮作业的方式,在低潮露滩时采用机载激光雷达技术扫描被监测区域,合理利用每次的高、低潮时间。在深水区,采用DGPS-测深仪协同探测技术测量水下地形,西沪港测量区域分区作业示意图如图1(b)所示。
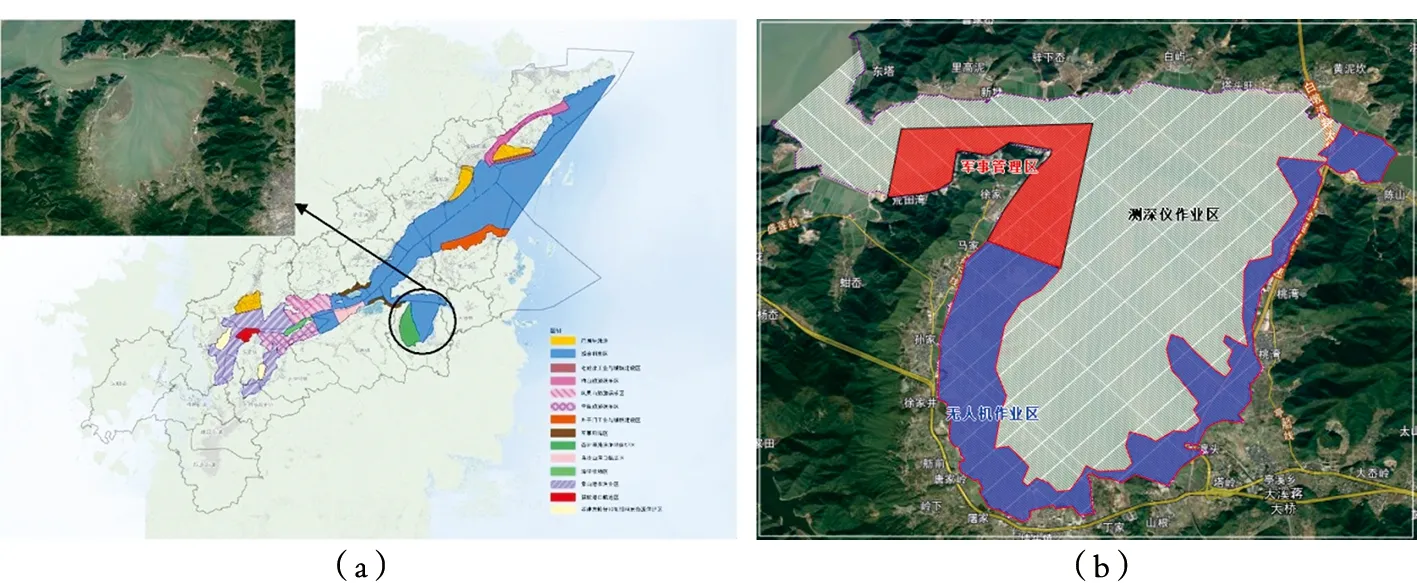
图1 西沪港水下地形测量区域及分区作业示意图
3 西沪港水下地形测量
3.1 控制测量
为满足地形测量的需要,在进行水下地形测量之前,率先完成工程测量区域的平面和高程控制测量。本次共布设了33个一级GPS控制点,控制点设置在地平仰角15°以上且视野内没有障碍物的地方,并避开了电磁辐射源和可能产生多路径效应误差,两点之间相互通视,其点号从I1开始依次流水编号至I33。一级GPS控制点和临时水位站、人工验潮点的高程测量按四等水准测量精度施测,以收集到的高等级水准点为起算点进行联测组成附和水准路线,水准路线总长度为 33.761 km。四等水准使用TrimbleDINI 03电子水准仪配合条码水准标尺进行观测,水准观测前对水准仪i角误差进行了检测。
为方便水下地形测绘、高程测量,一级GPS控制点均选在坚实地面上,控制点为十字道钉,并在实地用红油漆标记点号,部分示意图如图2所示:

图2 临时验潮站位置示意图
3.2 基于DGPS-测深仪协同探测的深水区水深测量
根据深水区水下地形特征和规范要求,主测线基本按照与海底地形走向垂直的原则布设,检测线基本按垂直主测线方向布设。主测线按 40 m间距布设,垂直主测线方向按 500 m间距布设检查测线,测点间距均为 20 m。共布设主测线460条,长约 1 295 km,检查测线21条,长约 90 km,具体测线布设情况如图3(a)所示。
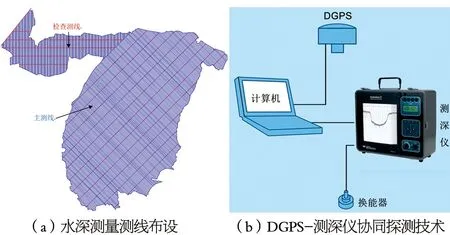
图3 西沪港深水区水深测量示意图
深水区水深测量采用的是基于DGPS-测深仪协同探测技术,该技术使用高精度精密回声测深仪,测深仪换能器采用舷挂式安装,导航定位GPS天线与测深仪换能器中心处于同一垂面上。测量时,导航软件实时采集测深仪输出的数字式水深信息和星站差分GPS接收机输出的定位数据,并在测深仪的模拟记录上同步进行打标,以便核查。水深采集记录至 0.01 m,测深仪模拟记录读数精度为 ±0.1 m,DGPS-测深仪协同探测技术示意图如图3(b)所示。
另外,水深测量所得数据要进行静态吃水改正、动态吃水改正和声速改正。经试验,本文测量中换能器的静态吃水改正值为 0.2 m。由于测深仪换能器安装在测船中心附近位置,测量期间航速比较稳定,本文忽略换能器吃水的影响。由于测区内声速变化较小,本文忽略声速改正。本文所用测深设备在外业工作开展前均通过了专业检测单位的检定,其测量精度完全满足精度要求,相关数据分析见下文。
3.3 基于机载激光雷达技术的盐沼与滩涂地形测量
西沪港内存在大面积滩涂,水深较浅,长时间露滩,互花米草等植被覆盖较多,无法采用传统水深测量方式进行水下地形测量。该区域采用无人机搭载激光雷达的方式进行作业,采用成都纵横CW-30 LiDAR系统对大块露滩区域进行测量,采用扫描鹰HS-300低空激光扫描测图系统对部分小区块进行补测,共完成约 15 km2盐沼测量任务。
在无人机搭载一个GPS模块作业的同时,需要在一个已知点(已知CGCS2000坐标即可)点位上架设静态模式的GPS接收机,采集相同作业时段内的GPS数据,基站理论覆盖距离为 25 km。为保证作业精度,无人机设计离地最大航高为 100 m,根据规范要求合理布设航线,相关示意图如图4所示。
图4 现场测量情况图
4 数据处理及分析
本文实验数据不仅涉及水下地形测量的直接数据,还包括水下地形测量前的控制测量数据,以及水深测量仪等高级仪器可靠性检验数据,实验数据的基本解算过程和成果分析具体如下文所示:
4.1 控制测量数据分析
(1)高程控制测量数据分析
根据高程控制网布设特点,已知数据和观测数据数量,采用间接平差原理对高程控制网进行严密平差。经过平差计算得到表1中7条闭合、附合水准路线闭合差,进而得到本文每公里高差中误差最大为 12.75 mm,满足允许值 ≤±20 mm精度要求,能够为水位控制测量提供基础数据。
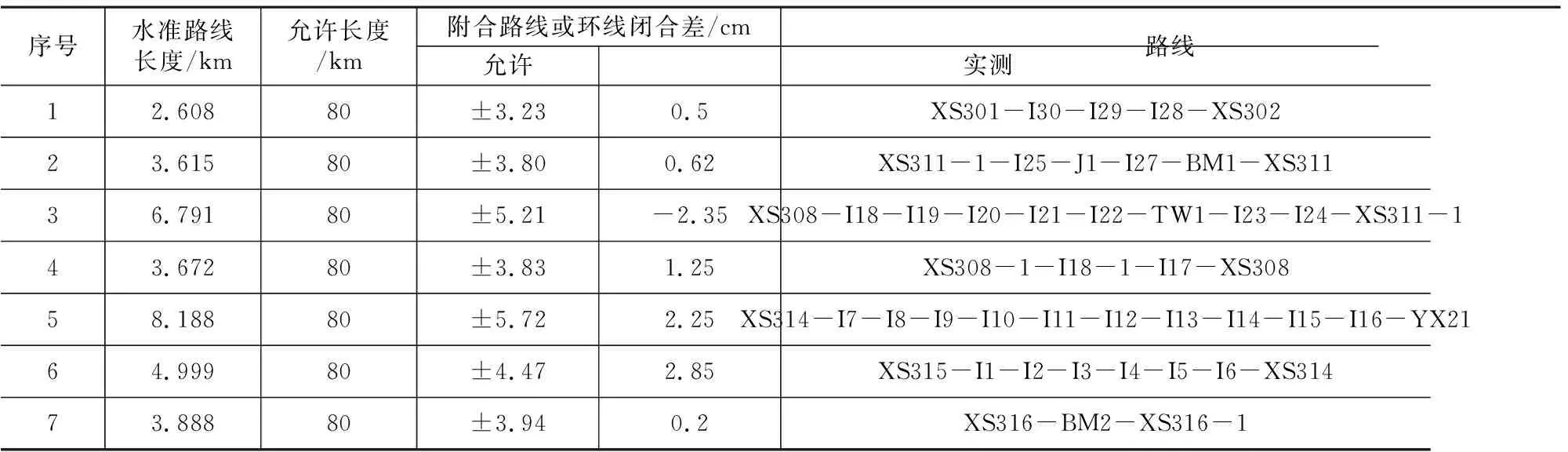
表1 四等水准平差精度统计表
(2)平面控制测量数据分析
在平面控制测量中每个一级GPS控制点分别按1个时段观测4次,每次观测历元数为20个,最终取4次观测值的平均值作为最终成果。作业前后在已知C级控制点进行检查,平面校差最大值为△X=1.2 cm和△Y=0.6 cm,高程较差△h=2.8 cm,满足规范要求。其中,部分GPS观测成果如表2所示。

表2 GPS控制点成果表
4.2 DGPS-测深仪协同探测精度分析
(1)DGPS获取平面位置精度分析
为保证平面控制测量的精度,海上工作开始之前,在已知点上进行了GPS稳定性及定位精度的静态比测,测试定位数据均位于已知点 0.5 m半径范围以内,定位中误差为 ±0.18 m,表明GPS稳定性和定位精度良好,能够满足本次测量定位要求,如图5、表3所示。定位点点位中误差如公式(1)所示:

表3 差分GPS系统测试定位数据统计表
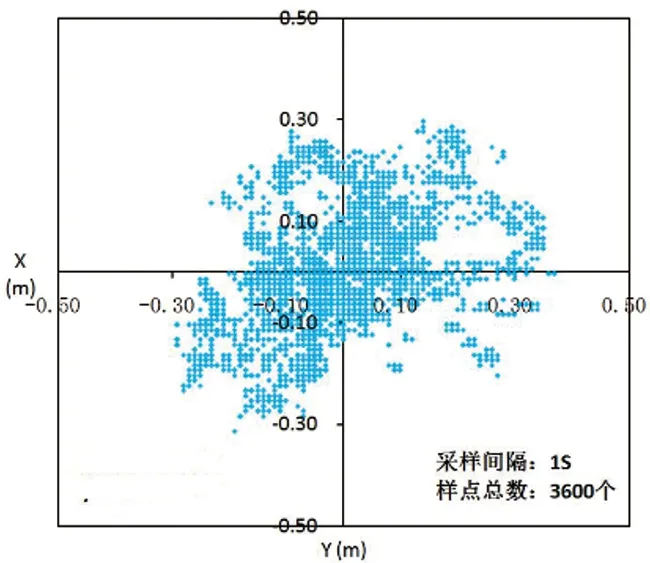
图5 差分GPS系统测试定位数据离散图
(1)
式中:(Xpo,Ypo)为已知点高精度平面坐标,(Xpi,Ypi)为已知点实时定位坐标,n为定位次数,Mp为定位点点位中误差。
(2)测深仪测量精度分析
外业工作开展前,对所有即将投入使用的测深仪进行了一致性测试和稳定性测试。首先,进行测深仪稳定性测试,把测深仪的换能器固定在一定水深位置,水深值大于 10 m,按固定时间间隔采集水深数据,连续测量时间超过 8 h,然后统计水深值的离散情况,计算中误差,测深仪HY1601(1#)、HY1601(2#)和HY1601(3#)的稳定性中误差分别为 10.2 mm、7.2 mm和 8.0 mm,具体如表4所示。
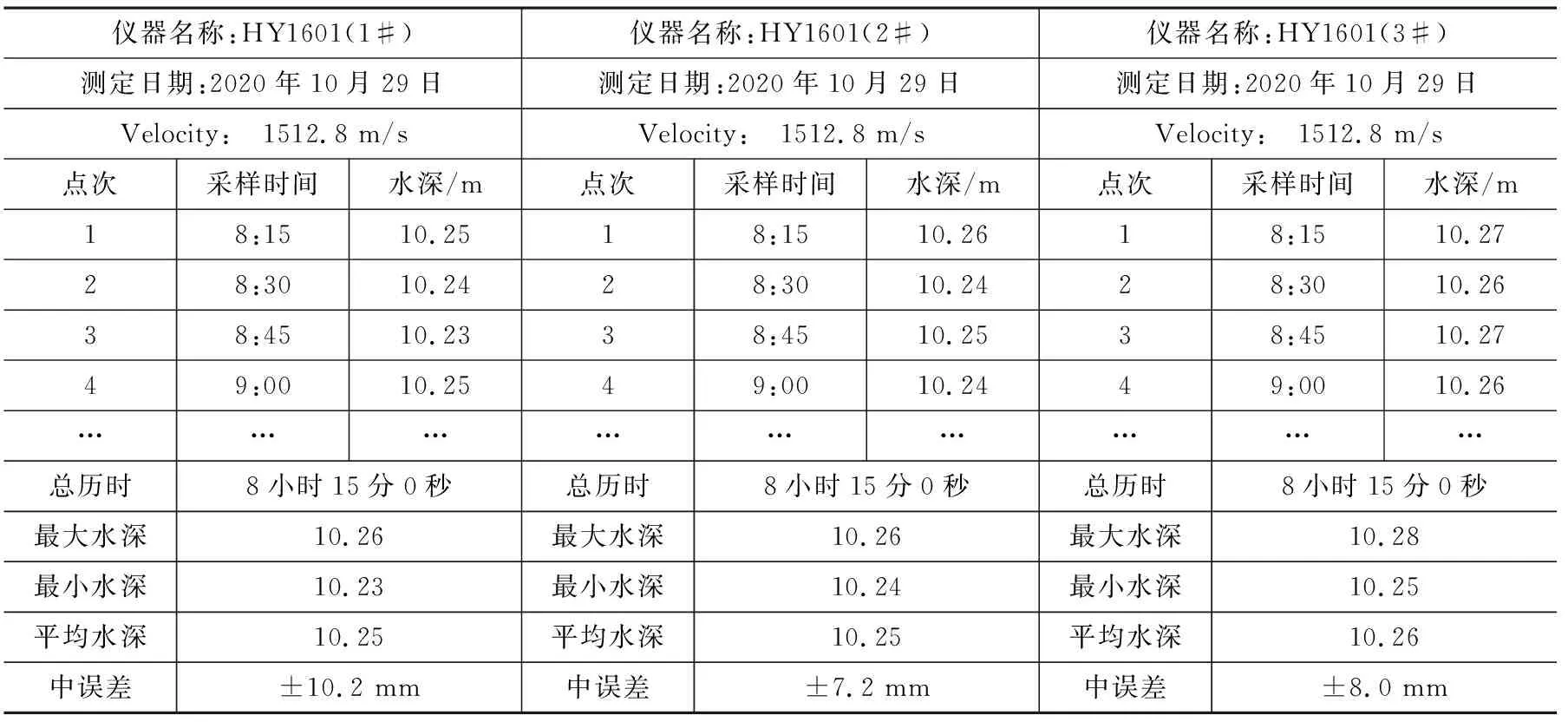
表4 测深仪稳定性测定表
其次,进行测深仪一致性测试,把多台回声仪放置在同一水深的位置进行测量,统计各台仪器测量结果的差值。同一时刻,测深仪HY1601(1#)、HY1601(2#)和HY1601(3#)相对于平均值的最大偏差小于0.02 m,如表5所示。
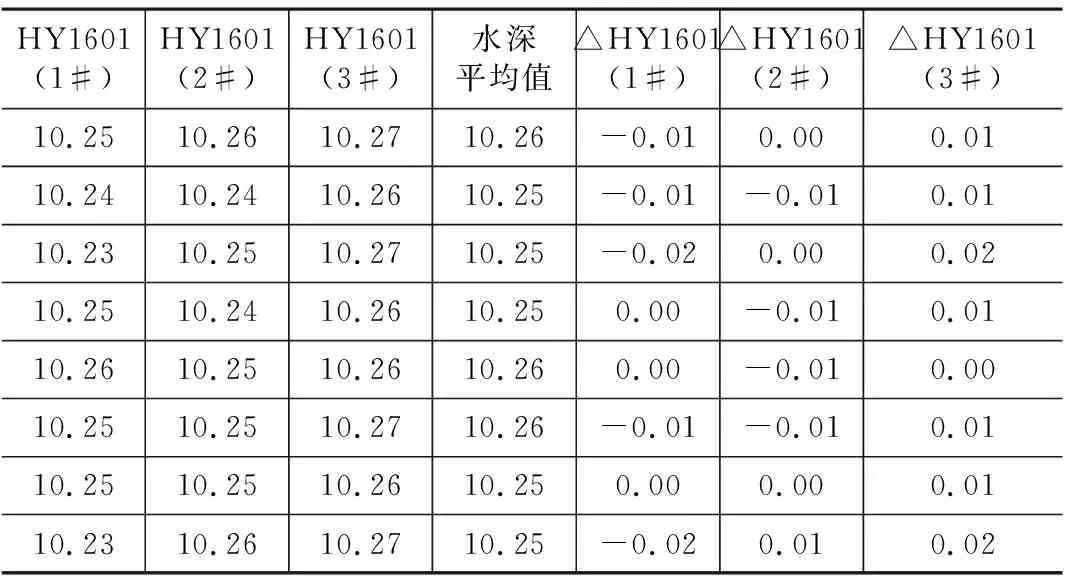
表5 测深仪一致性测试表(单位/m)
(3)DGPS-测深仪协同探测精度分析
在实际水深测量过程中,实时采集差分GPS数据和水深数据,定位间隔为 1 s,测深间隔为 0.2 s,定位点之间水深点的位置由计算机通过内插获得。作业时,GPS天线直接固定于测深仪换能器杆子之上,内业资料整理时无须进行位置改正。
为了反映水下地形测量的精度,本文从深度误差和深度比对互差两个角度进行衡量。根据式(2)计算深度误差发现,测区水深不大于 20 m的主、检测线重合点共106个,中误差为 ±0.18 m;大于 20 m的重合点共92个,中误差为±0.0092H,满足规范要求(水深H≤20,深度误差限值±0.20 m;H>20,深度误差限值±0.01H)。
(2)
式中:△Hi为主测线和检查线重合点i水深差值,n为重合点个数,Mh为水深中误差。
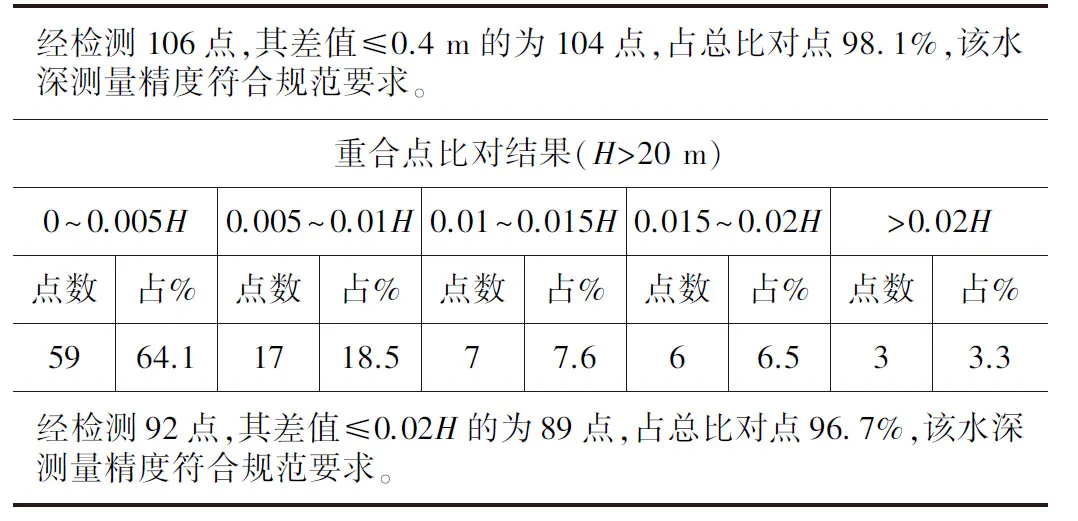
在深度比对互差方面,采用完成各项改正的每 0.2 s主测线及检查线水深数据进行互差分析计算。在程序计算时,取相交的主测线和检查测线数据,计算其交点作为深度互差对比重合点,该点主、检测线水深由对应测线上前后两点实测水深通过线性内插获取(通常,前后两点之间的定位距离约为 0.6 m~1 m)。测区主检测线重合点水深值比对统计情况如表6所示。

表6 测区主测线和检查测线重合点水深值比对统计表
4.3 基于机载LiDAR技术的盐沼与滩涂测量成果分析
对飞行设备上GPS模块的GNSS数据,联合基准站GPS数据进行解算。通过点云数据预处理、后处理等过程后提取出的地表点云,生成等高线模型与DEM模型,技术流程图如图6所示。
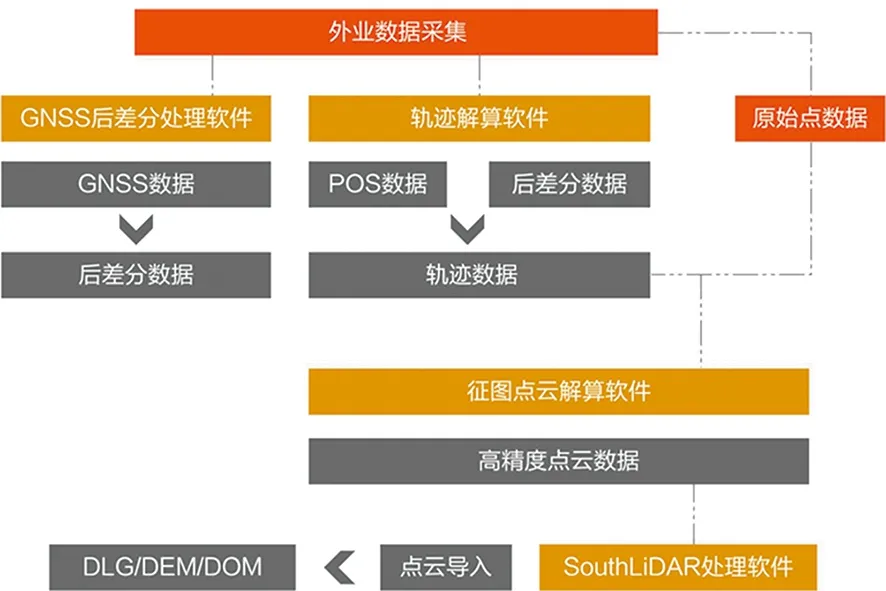
图6 机载雷达数据处理流程图
根据经各项改正后的测区水深数据集、滩涂高程数据集按要求的比例尺进行水下地形图绘制。地物符号和地貌元素按相应图式绘制。岸线套用最新大陆岸线修测成果,滩涂部分地物、地貌要素利用无人机激光雷达技术测量得到的数据集进行绘制,部分地物、地貌要素由搜集的地形图转绘得到,使用计算机自动化制图系统进行制图,如图7所示。
图7 西沪港水下地形图
5 结 论
西沪港水下地形测量环境复杂,区域内盐沼、泥滩等严重限制了测量船监测系统的使用。因此,本文采用无人机载激光雷达技术进行辅助测量,在水准网和GPS平面控制网的基础上,采用高精度DGPS-测深仪协同探测技术测量深水区域,应用高-低配双无人机载激光雷达技术进行盐沼与滩涂测量,主要得到以下结论:
(1)水下地形测量高程控制网每公里高差中误差最大为 12.75 mm,GPS平面控制网在X和Y方向的误差最大值分别为 1.2 cm和 0.6 cm,均在限差允许值范围内。
(2)本文所用DGPS-测深仪协同探测技术中,测深仪稳定性中误差约为 8.5 mm,一致性最大偏差小于 2 cm,DGPS技术定位中误差为 ±0.18 m,单项技术均能够满足使用要求。
(3)本文采用DGPS-测深仪协同探测技术测量西沪港深水区水深,测区水深不大于 20 m的主、检测线重合点共106个,中误差为 ±0.18 m;大于 20 m的重合点共92个,中误差为±0.0092H。通过对经各项改正后的主检测线重合点水深值比对,发现重合点的深度比对H≤20 m互差超限率小于1.9%,H>20 m互差超限率小于3.3%,符合相应技术规范的要求。
(4)本文采用高精度测深仪、高精度GNSS定位系统、高-低配双无人机激光雷达系统等多源监测技术测量西沪港水下地形,实现了关于大区域、复杂环境、高精度要求水下地形测量的技术突破,是海陆空地形一体化测量方法应用的典型案例。