无人机无人船海陆空间信息一体化测绘方法研究
2022-09-02汪大超柳华桥向荣唐琨
汪大超,柳华桥,向荣,唐琨
(天津市测绘院有限公司,天津 300381)
1 引 言
随着近海水域的不断开发和城市化建设的飞速发展,无人机、无人船等非载人式勘测技术在水下地形应用中越来越受到行业重视[1,2],其非接触式的特点能保障作业人员的生命安全,其灵活、机动、低成本的特点能大幅提高生产效率,陆海多源数据融合技术愈发成熟,将多种无人技术综合应用于测绘实践的时机已经成熟。
在内湖等测量领域,尤其是浅水区的水深测量中,单波束无人船是一种应用比较广泛的自动化测量设备[3]。在内湖水深测量时,无人船水下测量系统无须搭载人员,安全系数高,数据采集量大等特点大幅降低了人员落水风险和作业强度[4]。但在浅滩、礁石、渔网等出水地物较多的复杂水域中,传统载人船测量手段可以根据现场情况随时调整航行路线,而无人船受其搭载的卫星影像的精度和现势性问题,不能反映水面的实际工作状态,导致无人船在复杂水域的搁浅风险增大,甚至无法开展自动导航的工作。此时,作业员只能采用手动作业模式,对视线附近的水上障碍物进行合理规避,但对于远滩或远岸的障碍物,当船体离操控者太远,或遮挡物较多,其自动规划航线的应用场景大大受限。会大量增加操控量,使船体安全面临较大风险,极大限制无人船的应用场景。全部采用人工操控的方法又对作业员要求很高,低矮视角导致无法规避所有障碍等因素,严重制约了复杂水域的作业效率。无人机航测系统为解决上述难题提供了一种新的解决方案[5]。无人机倾斜摄影测量,则具有机动性高、地形分辨率高、自动化程度高、正射影像现势性强等特点,可以将无人机生成的正射影像作为无人船的工作底图[6],合理地规划无人船的航线,规避浅滩、礁石、渔网等各类出水地物,实现空域和水域的协同作业。为此,本文提出无人机无人船在内湖等浅水条件下的海陆空间信息一体化测绘方法,工程实践说明了方法的有效性。
2 无人机无人船海陆空间信息一体化测绘方法
无人机航测系统的现势性强、分辨率高,操作简单,能提供包括DOM、DSM、三维模型等多种数据成果[7],被广泛应用于工程测绘、大比例尺地形测绘等领域中[8]。其配合无人船水下测量系统的自动导航功能,既能实现船体航线依据实时影像的自动规划、自动航行、自动返航等指令的实施,还能充分利用无人船的自动避障、人工介入、画面回传等功能,提高船体操控的安全性,实现测区内水上和水下地形的无接触式、全覆盖、高精度测量。
无人机无人船海陆空间信息一体化测绘方法首先通过无人机进行摄影测量工作,获取测区的实时正射影像,然后将此影像作为工作底图进行无人船的测区划分和航线规划等工作[9]。再由无人船开展水深数据的自动化采集,通过软件生成水下DEM模型。最后与无人机空三模型构建的水上DEM模型融合处理,获取海陆空间信息一体化成果,用以计算出测区范围内的土方量等应用[10]。
无人机无人船海陆空间信息一体化测绘方法作业流程如图1所示。其中,数据融合是将水上水下的栅格DEM数据进行整合。首先进行数据预处理,统一数据格式、坐标系统、高程基准、数据采样间隔等,然后删除无人机采集的水面DEM数据,只保留出水部分的数据,即将重叠区域的数据删除,再对数据进行整合和重采样,最后输出整合后的DEM数据。
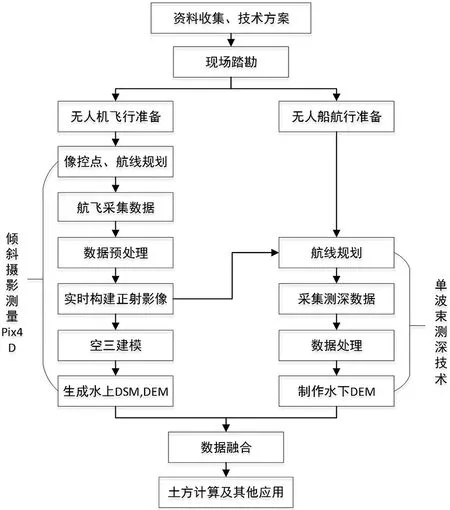
图1 无人机无人船一体化作业流程
3 工程应用实例
位于天津市中新生态城某处邻近渤海湾的待开发地块,要求实测测区范围内的水下及岸上地形图,并计算该区域的填挖土方量。该区域被分隔为多个独立水域,总面积约 0.7 km2,各独立水域内还存在多处内岛、浅滩、养虾网等出水地物,且在不同水位时期的岸线范围变化较大,无论是用载人大船还是无人船自动测图都存在较大困难和搁浅风险。为充分采集该区域的水深和地面数据,需采用无人机无人船一体化作业模式。
3.1 无人机航测采集正射影像
本项目航测作业采用大疆精灵4RTK无人机执行影像采集任务,作业飞行高度设定为 150 m,地面分辨率为 4.11 cm,航测耗时 22 min,进行实时正射影像重建耗时 30 min,短时间内即生成了现势高分辨率影像,卫星影像与正射影像对比图如图2所示。由正射影像可见,在西侧独立水域的中心,有一处距岸边 300 m,长约 280 m,宽约 170 m的湖心岛,该岛在水位较浅时可外扩约 50 m,并与周围其他浅滩连成一体,在高水位时,将进一步缩小其岸线位置。因此,如果仅采用卫星影像规划无人船自动航线,影像的现势性无法满足规划需求;如果采用作业员手动操控无人船,则无法判断船体与操控者、船体与湖心岛岸边的距离等问题,容易造成搁浅、数据采集密度不足等问题。采用无人机正射影像辅助无人船一体化作业,上述困难则迎刃而解。

图2 卫星影像(左)与正射影像(右)对比图
3.2 无人船采集水深数据
本项目水深作业采用合众思壮UB100无人船,无人船自重约 10 kg,吃水深度 0.12 m,方便运输和操控。针对西侧的独立水域,使用正射影像规划2条航线,导入无人船开展自动化测深作业。结合无人机正射影像的航线规划如图3所示。

图3 航线规划图
3.3 数据融合和土方计算
数据采集完成后,使用Pix4D处理无人机的航测数据,使用楚航无人船岸基控制软件V11.12处理水深数据,将无人船和无人机的高程数据融合,最后使用Autodesk Map3D进行土方量的数据处理和计算,得到该区域填挖至 3.5 m的土方量为 1 302 181.3 m3。DEM构网模型及计算结果如图4所示。
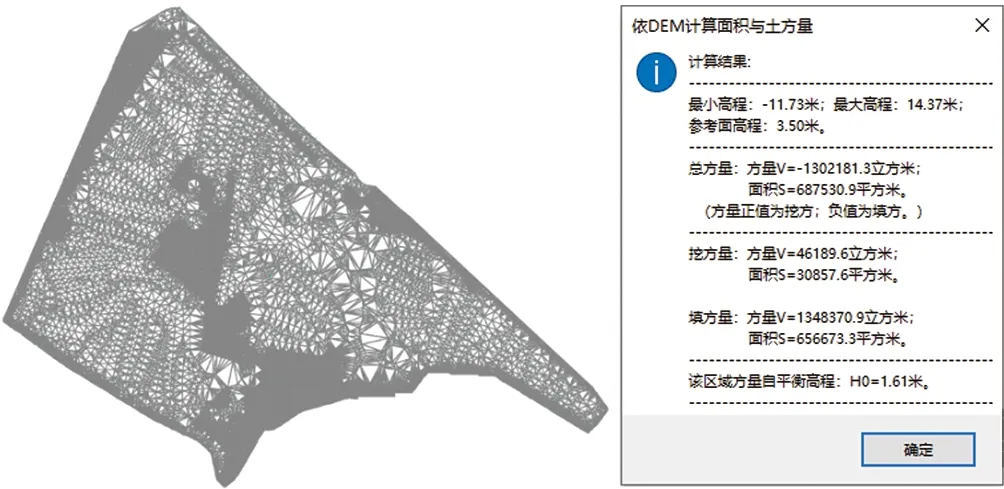
图4 依DEM计算结果
4 结 语
本文提出一种在内湖等复杂水域中,利用无人机和无人船开展水上、水下地形测量的一体化作业方法,并通过数据融合,生成测区的数字高程模型等成果。在天津市中新生态城某水域的实践应用中,证实了该方法在复杂水域开展自动化测图的可行性,构建出高精度的水下和水上模型,重现测区水底地貌,实现了基于TIN的土方量估算,既保障了仪器设备的安全和人员安全,又大幅提高数据采集的效率和密度,为该项目的顺利实施提供科学依据,节省大量成本。
无人机、无人船的海陆空间一体化测绘,既弥补了无人机无法测得水深数据的缺陷,又实现了复杂水域条件下无人船自动航线的合理规划和施测,能够解决复杂水域中传统测量手段无法到达的问题,提高作业效率和精度,为海陆空间信息一体化采集开辟了新的道路。