基于SiPM 的硫化锌闪烁探测器设计与研制
2022-09-01王玮李婷武旭东段金松麻金龙张兆山
王玮,李婷,武旭东,段金松,麻金龙,张兆山
(核工业北京地质研究院,北京 100029)
随着光电探测技术的不断发展,一种新型的硅光电倍增管(Silicon photomultiplier,SiPM)的发展引起人们的广泛关注[1-2]。SiPM 是由数个独立工作在盖革模式下的单光子雪崩二极管(Single Photon Avalanche Diode,SPAD)串联猝灭电阻集成在单片硅晶体上的阵列探测器,具有体积小、抗干扰能力强等特性[3]。目前已被广泛应用于粒子物理、空间物理及核医学(特别是PET 方面)等领域[4]。
SiPM 的高探测效率,低工作电压,对磁场不敏感等优点[5-6],使其具有一定的潜力替代辐射探测器研制中常用的光电倍增管(photomultiplier tube,PMT)进行低能光子及高能射线探测;但同时也拥有半导体器件对温度敏感的特性,其暗电流、增益、雪崩临界电压值等指标受温度影响较大。针对这一局限性,已有研究提出通过实时温度监测并相应地改变SiPM 偏置电压从而进行自动增益校正[7-8];以固定特征峰位道址为参考调节偏置电压[9];采用半导体制冷技术控制探测器温度[10]等技术解决方案。在此基础上,本文研制基于SiPM 的硫化锌闪烁探测器,旨在通过温度控制方式解决探测器因温度升高而导致探测效率降低的问题,提高探测器稳定工作的动态温度范围。
1 系统设计
探测器整体结构设计如图1 所示,主要包括信号探测与采集电路、温度控制系统及电源模块。系统以主动泵吸形式将含氡气体吸入闪烁瓶内,氡及其子体发射的α粒子使闪烁瓶内ZnS(Ag)涂层受激发光,信号探测与采集部分通过SiPM 进行光电转换,经前置放大电路放大,以幅值判别为依据通过成形与甄别电路获得计数脉冲。针对SiPM 对温度敏感的特性,温度控制系统通过温度采集模块进行实时数据采集,微控制器内置模糊PID 控制算法进行运算,通过输出PWM 信号调整半导体制冷器运行功率,有效降低冷端温度,实现探测器温度的控制。电源模块为系统稳定运行提供基础。
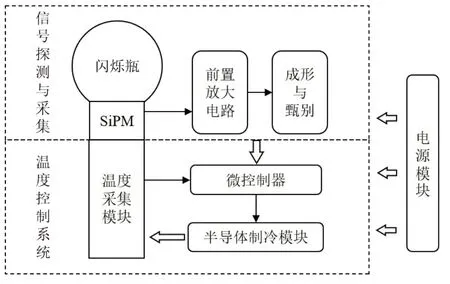
图1 硫化锌闪烁探测器整体结构设计图Fig.1 Integrated design of ZnS(Ag)scintillation detector
2 信号探测电路设计
探测器设计选用MicroSC-60035-SMT 型SiPM 作为光学读出端,其光敏面积为6 mm×6 mm,峰值波长约为420 nm,增益可达3×106,配合聚四氟乙烯聚光罩可有效探测闪烁瓶内光信号。
2.1 前置放大电路
根据SiPM 输出端的电流耦合方式不同,前置放大电路分为直流耦合和交流耦合两种类型,如图2 所示[11]。直流耦合放大电路将SiPM输出直接连接至放大器,SiPM 漏电流随信号电流一同流入放大器从而产生直流偏移,高计数率情况下可能引起放大电路饱和堵塞。交流耦合放大电路经过耦合电容C1 连接至放大器,输入信号直流分量为零,具有低噪声,无直流偏移,计数脉冲通过率高的特点。
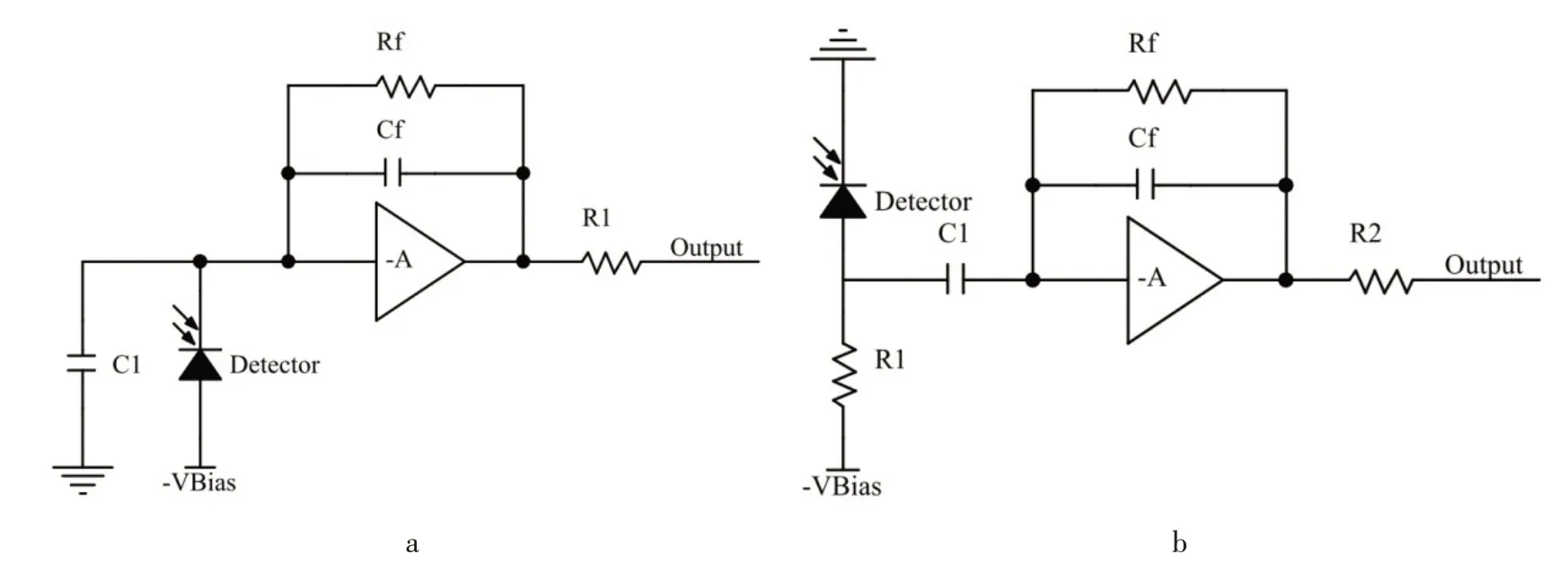
图2 基于不同耦合方式的前置放大电路示意图Fig.2 Schematic diagram of preamplifier circuit based on different coupling modes
以交流耦合形式设计前置放大电路,如图3所示。MicroSC-60035-SMT 在25℃时的雪崩击穿电压为24.5 V,且当其过电压在(1~5)V 范围时可获得较高的增益和较低的工作噪声,因此使用偏置电源提供27 V 正向偏置电压,经偏置电阻R1 连接至SiPM 阴极。L1、C3、C4 构成π 型滤波器提高偏置电源稳定性。SiPM 输出信号经交流耦合电容C1 隔直后输入到具有结型场效应晶体管(JFET)输入级的放大器OPA656 中。R2、C2 构成放大器负反馈网络,反馈电阻R2 决定信号放大倍数,反馈电容C2 作为补偿电容,防止电路自激[12]。交流耦合电容C1 与放大器等效输入电容之间会有信号分压,降低信号幅度,为消除分压效应,将C1 纳入交流负反馈支路。电路中需注意C1 的选择,C1 太小时会造成电荷耦合不完整,太大时可能将电源低频噪声耦合到电路中,一般选择10 nF 为宜。

图3 基于SiPM 的前置放大电路原理图Fig.3 Schematic diagram of preamplifier circuit based on SiPM
2.2 信号成形与甄别
前置放大电路输出的脉冲信号上升沿陡峭,抗干扰能力弱,不适合直接用于幅值甄别。针对这一问题设计滤波成形网络,用于改变脉冲形状,抑制电子学噪声,提高系统信噪比[13]。滤波成形网络由一级CR 微分和两级RC 积分电路构成,并加入极零相消电路。经RC-CR 滤波后的信号,脉冲峰位右移、时间宽度增加,被滤波成形为准高斯波形。同时,极零相消电路的引入消除滤波成形网络产生的信号过冲现象,使脉冲下降沿快速收敛于基线,有效减少信号堆积。
信号幅值判别通过由比较器、触发器及逻辑门电路等器件组成的单道脉冲幅值甄别电路实现,其上、下阈值设置可有效滤除噪声和宇宙射线干扰。当输入信号介于给定阈值范围时,甄别电路产生一个方波信号用于计数。
3 温度控制系统设计
MicroSC-60035-SMT 增益随温度的升高而降低,随偏置电压升高而增加;暗电流计数随温度和偏置电压的升高而增加。因此,通过调节偏置电压进行温度补偿的方法在提高增益的同时可能引起暗电流计数急剧增加,为该探测器的下阈设置带来不确定性。本文通过使用半导体制冷器和高导热性能材料进行热传递实现SiPM 周围局部空间快速降温的方法提高探测效率,其温度控制系统如图4 所示。SiPM 固定于电路板,半导体制冷器冷端通过铜块连接至电路板,接触面涂抹导热硅脂进行热传递;热端连接纯铜热管散热器和风扇快速带走多余热量。四路温度传感器构成分布式温度采集模块,分别用于实时获取SiPM、导冷铜块、半导体制冷器热端及环境温度。

图4 温度控制系统结构示意图Fig.4 Structure diagram of temperature control system
3.1 实时温度采集电路
实时温度采集电路如图5所示,使用4个支持“一线总线”接口的数字化温度传感器DS18B20并联挂接到微控制器IO口进行温度数据采集。该传感器在(-10~85)℃范围内测量精度为(±0.5)℃,测温分辨率可设置为0.062 5℃,温度以16位带符号扩展的二进制补码形式串行传输,具有良好的抗干扰性能。为保证系统稳定可靠运行,使用平均滤波法进行滤波,消除偶然出现的脉冲性干扰引起的采样偏差。
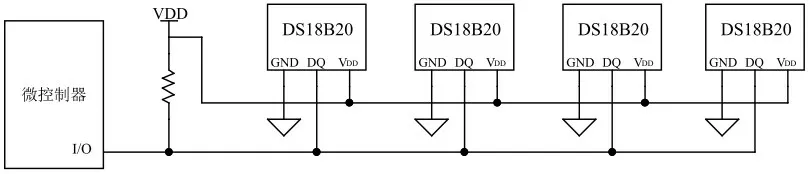
图5 实时温度监测电路Fig.5 Real-time temperature monitoring circuit
3.2 半导体制冷模块驱动电路
微控制器根据温度传感器测量值进行半导体制冷模块的反馈调节,其驱动控制电路如图6 所示。系统通过发送PWM 信号改变光耦TLP521 工作状态,进而驱动场效应管实现制冷模块工作回路的通断。光电耦合器的应用实现了控制电路和驱动电路的电气隔离,防止驱动电路的强电流对控制信号产生干扰。

图6 半导体制冷模块驱动控制电路Fig.6 Driving control circuit of semiconductor refrigeration module
4 控制程序设计
系统采用基于Cortex-M3 内核的STM32 系列微控制器作为核心控制单元,初上电时进行系统参数设置,功能接口初始化和信号甄别阈值设置等;并通过嵌入式实时操作系统FreeRTOS 协调运行测量任务,温度采集任务及PID 控制任务等。
针对温度变量的非线性、大滞后和时变等特性,传统的PID 控制系统难以达到精确控温的效果,系统采用模糊理论与PID 控制相结合构成模糊PID 控制器[14-15],通过对不同目标温度的变化曲线分析制定模糊规则,以温度变量输入偏差和偏差变化率作为模糊控制器输入变量,通过模糊规则对PID 调整参数进行在线模糊推理,以克服传统PID 参数无法实时调整的缺点。
5 试验与结果分析
基于SiPM 的硫化锌闪烁探测器的设计主要包含信号探测与采集和温度控制两部分,其中温度控制系统是整个探测器可稳定运行于温度变化较大的自然环境的基础。因此,为验证整个探测器的稳定性与可靠性,本文将分别对温度控制系统的性能和探测器的性能指标进行分析和评估。
5.1 温度控制系统性能分析
5.1.1 系统制冷性能分析
使用校准后的温度传感器测量半导体制冷器冷端、热端和环境温度。去掉前端铜块,关闭模糊PID 控制功能,手动调节作用于制冷片的供电模块输出电流,设置传感器读数间隔为2 s,在环境温度约为25℃时测试系统制冷和散热能力,结果如表1 所示。
由表1 可知,根据功率计算公式获得的半导体制冷器的电阻约为1Ω,可近似看做一个纯欧姆电阻进行控制。在低电流情况下,冷端温度达到稳定值时,热端温度与环境温度差异较小;随着电流的增加其制冷温度趋于不变,制冷效率下降;系统以接近最大功率运行时,冷端温度稳定在3℃。

表1 不同设置电流下的制冷温度和温差结果Table 1 Refrigeration temperature and temperature difference results under different setting currents
5.1.2 模糊PID 控制
将温度变量输入偏差e的物理量论域取值范围设定为[-10,10],量化至{-6,6},量化因子设置为0.6;偏差变化率ec的范围设定为[-5,5],量化至{-6,6},量化因子设置为1.2。试验设定目标温度为10℃时的调控曲线如图7 所示,系统约316 s 达到稳定,超调量为0.6℃,稳态误差为0.2℃;高温环境时设置目标温度为25℃时的调控曲线如图8 所示,此时约355 s 达到稳定,超调量为0℃,稳态误差为0.2℃。
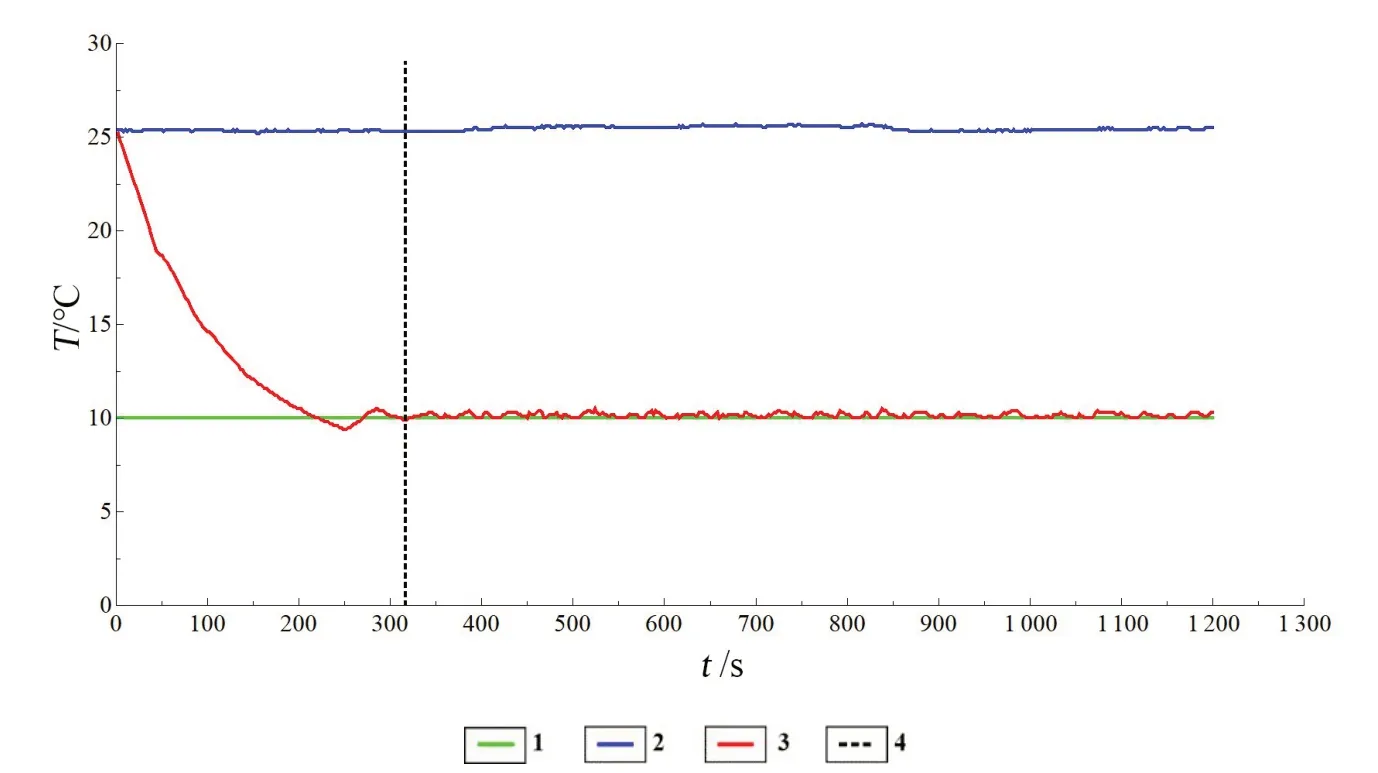
图7 常温25℃时基于模糊PID 控制的温度调控曲线Fig.7 Temperature control curve based on fuzzy PID algorithm at 25℃
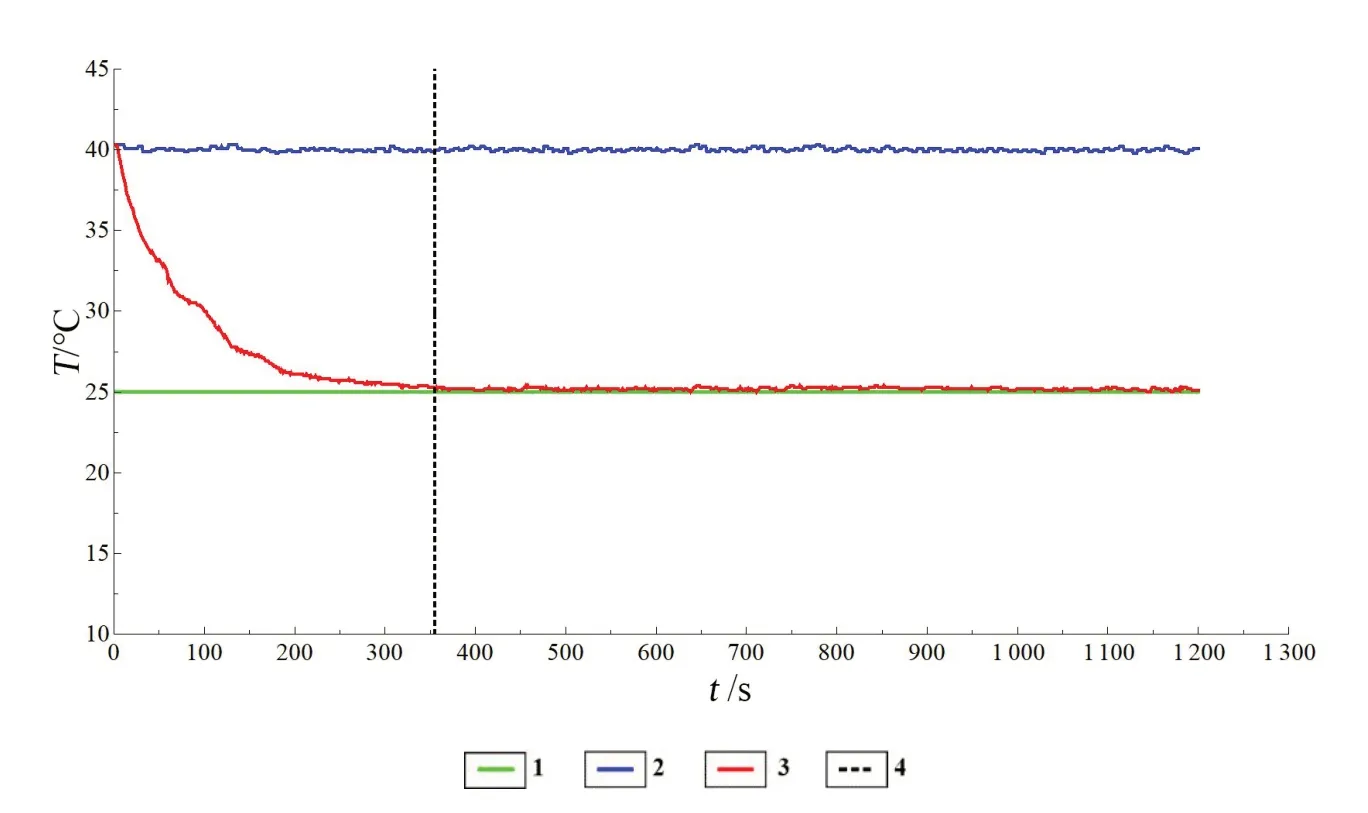
图8 高温40℃时基于模糊PID 控制的温度调控曲线Fig.8 Temperature control curve based on fuzzy PID algorithm at 40℃
5.2 探测器性能测试及结果分析
采用标准放射性物质作为测量对象,使用恒温试验箱模拟环境温度变化,设置温度变化梯度为5℃,到温后保持1 h 进行数据采集。以25℃时测量结果作为参考标准,探测器在(-15~50)℃时的探测效率变化如图9 所示。
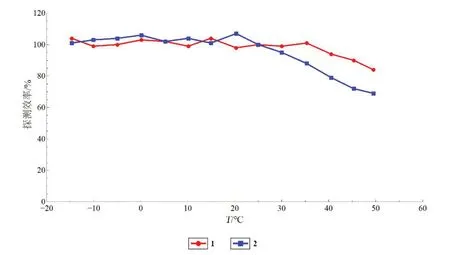
图9 不同温度下的探测器探测效率变化Fig.9 Variation of detection efficiency at different temperatures
由图9 环境温度下的测量曲线可知,在环境温度低于25℃时,探测效率受温度变化影响较小;大于25℃时,探测效率随温度的升高逐渐降低,其中30℃时的探测效率为25℃时的95%,40℃时约为80%。加入温度调控后,30~35℃时探测效率几乎保持不变,40℃时约为94%。因此,针对SiPM 对环境温度敏感的特性,该温度调控方式可适当补偿探测器因温度升高导致探测效率降低的问题,进一步扩大探测器工作的温度适用范围。
6 结 论
1)基于SiPM 的硫化锌闪烁探测器信号采集电路以交流耦合方式设计前置放大电路,信号经整形放大后,通过幅值甄别技术获得计数脉冲用于放射性含量计算。
2)针对SiPM 对环境温度敏感的特性,采用分布式测温模块配合模糊PID 控制算法实现探测器的实时温度调控,使探测器在环境温度(-15~40)℃变化范围内获得稳定的探测效率,基本满足野外实际环境的应用需求。
3)对于更高温度条件下的应用,可尝试温度控制和偏置电压补偿相结合的方法,在有效滤除本底噪声情况下获得稳定的探测性能。
