基于海图环境的无人艇全局路径规划
2022-09-01马欣杨兵邱斌彬王胜正赵建森
马欣,杨兵,邱斌彬,王胜正,赵建森
(1.上海海事大学商船学院,上海 201306;2.中远海运集装箱运输有限公司,上海 200080)
近年来,由于全球气候变暖、陆地资源紧缺、环境污染日益加剧,世界各国对海洋资源的开发更加重视,也因此带动了水面无人艇(Unmanned Surface Vehicle,USV)和水下机器人等海上高端设备的快速发展。作为一种海上智能机器人,USV 能够在无人干预的状况下独立执行任务,是一种具有体量小、高速智能、隐蔽性强等优点的水面作业任务平台,主要被用于执行具有危险性以及不适合有人船舶执行的任务。无人艇在环境监测、水文探测、近海巡逻、海上搜寻救助、远程侦察等民用及军事领域中都发挥了重大的作用。
Singh等使用可以设置安全距离的A*算法在卫星图上生成了一条沿岸的安全路径,该方法更适用于近岸航行。Candeloro等利用维诺图(Voronoi Diagram,VD)方法对新加坡海峡的航行空间进行分割,分割边界上的路径是环境中最安全的路径,但利用费马螺线方法平滑后的路径与初始规划路径偏差较大。Niu等利用维诺图算法和Dijsktra 算法进行全局路径搜索,在重构的新加坡海峡环境下得到了一条距离所有障碍物最远的路径但却不够平滑。Zhang等将遗传算法和模拟退火法混合,在栅格化的海图环境上进行了实验,解决了传统遗传算法搜索能力不足和时间消耗问题。以上研究虽然考虑了路径的安全性,但对实验环境中障碍物的建模以及路径的经济性考虑不足。
为了无人艇在自主航行过程中能够规划出一条安全、经济的路径,本文通过Web 海图构建基于5m 等深线的实验环境,确定全局路径规划的安全性优化目标,建立全局路径规划子模型。
1 实验部分
1.1 海图数据处理
首先,对于海图中渲染了不同颜色的面数据,用像素阈值分割技术进行处理。其中,满足水深约束条件的处理为可航区域,其他为障碍物区域。其次,筛选实验区域内碍航的点、线数据绘制在实验环境模型中。最后,将海图数据构建为栅格化环境模型。

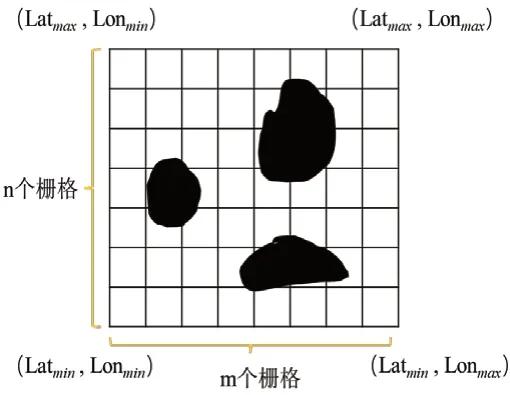
图1 坐标转换示意图


1.2 Voronoi-field 算法
维诺场是Dolgov等提出的在维诺图区域边界与障碍物之间按比例添加的危险势场,路径越靠近VE,则维诺场值越接近于0,越安全;路径越靠近障碍物,则维诺场值越接近于1,越危险。维诺场定义如下所示:

式(2)中,d(x,y)为当前节点到障碍物的距离;d(x,y)为当前节点到维诺边界的距离;a>0 是控制势场衰减率的常数;d>0 是控制势场最大作用范围的常量。
该公式适用于当势场值为0 时;因此,若将公式中的d设置为d=D,根据公式可知,维诺场值为0 的航行区域与障碍物之间的距离均大于USV 需要保持的安全距离D。无人艇航行在维诺场值为0 的区域能够降低碰撞风险。
1.3 改进A-star 算法
A-star 算法作为一种常用的启发式路径搜索算法,被广泛应用在全局路径规划领域。它的搜索方式有4 连通区域搜索和8 连通区域搜索两种,考虑到USV 在海洋中的运动特性,文中采用八连通区域的搜索方式对可航水域进行搜索。本文将危险度函数作为评价函数的一部分进行路径规划,改进后A-star 算法的启发式函数f(n)定义如下:

式(3)中,g(n)为起始点到当前节点的实际距离代价,h(n)为估算当前节点到目标节点的距离代价。D(n)为利用维诺场为栅格添加危险度的危险度函数。D(n)的定义如下:


2 结果与讨论
本文对选定的海图区域进行栅格化处理,划分为500×500 的栅格,每个栅格代表25m。针对USV 的操纵性能,设定了100m、200m、300m 的安全距离约束。基于不同安全距离约束并且平滑优化后的全局路径规划结果如图3所示,图3(a)为栅格环境中规划路径的显示,图3(b)为重绘的海图水深环境中规划路径的显示。
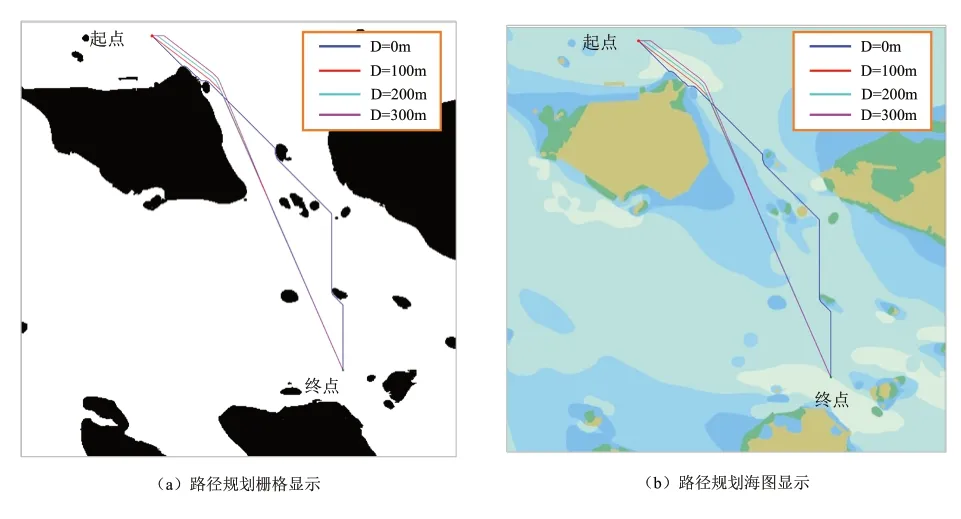
图2 不同安全距离约束下的全局路径规划结果
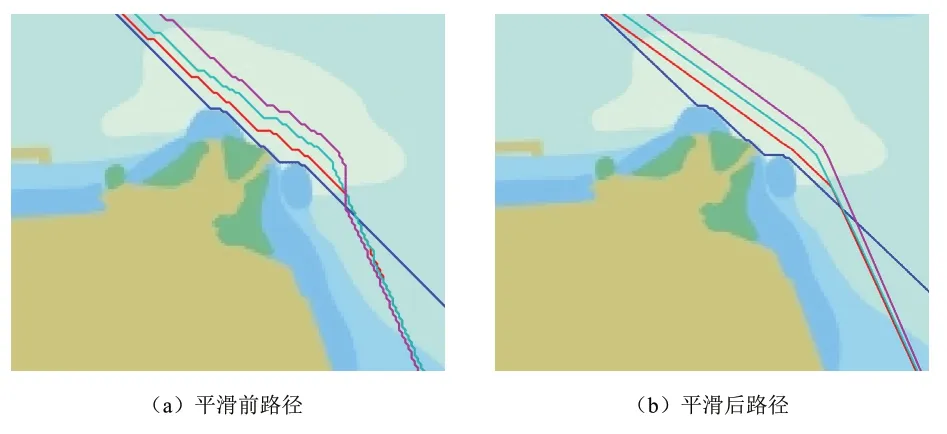
图3 不同安全距离约束下路径平滑效果对比
图2为传统A-star 算法与不同安全距离约束条件下A-star 算法的实验结果的对比。其中,蓝色实线为没有添加安全距离约束的A-star 算法全局路径规划的结果,可以看出规划的路径在障碍物附近贴近障碍物,这无疑会增加无人艇与障碍物之间的碰撞风险。红色、青色与洋红色分别为是保持100m、200m、300m 安全距离约束的路径规划结果,可以看出随着距离约束的增加,规划出的路径在靠近障碍物时能够保持距离约束并且安全距离越大的路径与障碍物的距离越远,所提的方法能够保证安全水深的约束。
图3为部分规划路径平滑优化前后的对比。图3(a)为平滑优化前的路径,路径转折次数多、不平滑,不符合航海实际与无人艇性能要求;图3(b)为平滑优化后的路径,路径转折次数少、平滑性高,具有较高的指导意义。
图4为三种不同安全距离下路径节点与障碍物之间的距离,从图中设置的黑色横向虚线可以看出,路径节点均与障碍物保持了设定的安全距离,能够提高无人艇航行过程中的安全系数。

图4 不同安全距离下路径节点与障碍物的距离
3 结论
本文针对无人艇全局路径规划展开研究,提出了基于海图环境的全局路径规划方法,在研究中着重考虑水深及安全距离的约束。首先,利用海图水深环境进行满足水深约束的环境建模;其次,利用Voronoi Field 算法进行安全距离约束设置并结合A*算法实现了在100m、200m、300m 不同安全距离下的路径规划;最后,利用路径规划中采集的数据可视化,分析了算法合理性和可行性。