无刷直流电机调速系统的设计与实现
2022-08-31韩佳芳李雅迪马琳琳魏强
韩佳芳 李雅迪 马琳琳 魏强

摘要:该文首先论述了无刷直流电机的基本构造与工作原理,以及电机调速的方法,分析研究利用单片机控制无刷直流电机调速的总体方案。采用AT89C51单片机作为整个控制电路的核心部分,L293D作为驱动芯片,硬件部分设计包括单片机最小部分,键盘电路,速度检测电路,正反转控制电路,过流保护电路等。选用KEIL作为单片机编程环境,设计无刷直流电机调速系统软件程序整体流程框图。在设计中,采用PWM调速方式,通过改变PWM的占空比从而改变电动机的电枢电压,进而实现对电动机的调速。设计的整个控制系统,在硬件结构上采用了大量的集成电路模块,大大地简化了硬件电路,提高了系统的稳定性和可靠性,使整个系统的性能得到提高。最后,无刷直流电机调速系统的仿真与调试,焊接的实物能够达到设计的要求,實现了电机启动、停止、正反转、加速、减速等功能。
关键词:无刷直流电动机;AT89C51单片机;调速控制;霍尔位置传感器
中图分类号:TP302.1 文献标识码:A
文章编号:1009-3044(2022)19-0108-03
1 引言
在传统的电机控制中,直流电机一直占据着很重要的地位,由于直流电机本身带有机械换向器和电刷,而产生了一系列的问题,比如电机容量有限、噪音大和可靠性低等,因此,人们开始尝试探索一种新型的低噪声、高效率和大容量的电机驱动电机。
随着科学技术的发展,电力电子技术和自动控制技术得到了很好的发展,人们开始将这些新兴技术运用到电机的研究当中,无刷直流电机也由此诞生了,无刷直流电机和传统的电机相比具有很多的优点,比如说体积小、效率高、容量大、可靠性高等[1]。
经过这些年的发展,直流电机的内部结构和控制方式与之前的电机相比较,发生了很大的变化[2]。尤其是计算机技术在控制领域的出现,新的电子功率器件的技术日趋成熟,通过全功率开关脉宽调制(脉宽调制)控制方法成为一种新的电机调速方法[3]。
2 无刷直流电机控制设计
2.1 系统总体设计方案
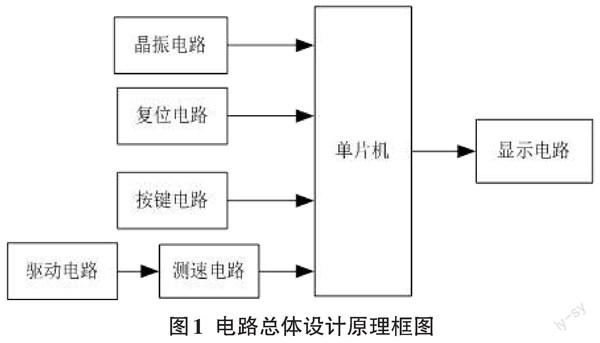
控制电路以单片机作为主控芯片,L293D作为驱动芯片,来驱动H桥电路。用PWM脉冲调制控制电机转速[4]。与单片微型计算机相比,新型单片机增加了许多新功能,包括脉宽调制功能[5]。对程序初始化设置,可以自动产生脉冲波形信号。改变占空比的大小,可以实现电机以不同的速度转动。总体设计方案原理图如图1所示:
2.1.1 控制电路基本原理
本文是基于单片机的无刷直流电机调速系统的设计,包括以下几个部分:AT89C51单片机,四位数码管,L239D驱动芯片,H桥电路,霍尔测速,键盘电路和直流无刷电机。
用AT89C51单片机作为主控制器,数码管用于显示转子的旋转方向和速度的大小,使用L239D作为驱动芯片驱动H桥电路,选择输入键盘用来实现对电路的控制。采用脉宽调制技术控制电机的速度。
2.1.2 脉宽调制技术(PWM)
在设计中,采用PWM调压调速方式,通过改变PWM的占空比从而改变电动机的电枢电压,进而实现对电动机的控制[6]。
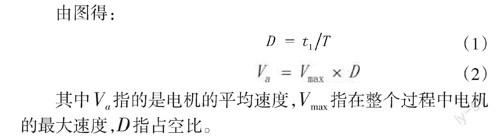
PWM控制的原理是在驱动电路中,通过改变开关在一个通断周期内接通的时间,也就是改变一个周期内高电平的持续时间,占空比的大小会影响输入的电枢电压,也会改变电机的转速[7],原理如图2所示。
由图得:
其中[Va]指的是电机的平均速度,[Vmax]指在整个过程中电机的最大速度,[D]指占空比。
当占空比发生改变时,输入电压就发生改变,从而电机速度也发生改变,即达到了调速的目的。无刷直流电机速度控制是运用PWM控制技术,对单片机AT89C51进行编程,能得到PWM输出波形,占空比的大小也可任意改变,只需在编程时处理占空比的大小即可。
3 系统硬件电路设计
硬件电路的设计是将每个功能子模块分开设计,再将这些子模块组合在一起,形成整个硬件电路的设计。硬件部分主要包括:单片机选型及外围电路、键盘电路,测速电路、正反转电路、过流保护电路等。
3.1 单片机选型及外围电路设计
3.1.1单片机最小系统
单片机最小系统是一个完整的计算机系统,可以使单片机正常工作,并能正常发挥其功能[8]。本设计采用AT89C51单片机,最小系统包括:AT89C51单片机、时钟电路、复位电路等。如图4蓝色虚线框内所示:
3.1.2时钟电路
单片机的时钟连接方式可以分为内部时钟方式和外部时钟方式。在本设计中用的是内部时钟方式,如图4黄色虚线框所示。在内部时钟方式中,XTAL1和XTAL2引脚两端必须连接在石英晶体振荡器和微调电容上,单片机、晶振以及电阻构成振荡电路,C1和C2一般取30pF,晶振的频率取值在范围1.2MHz~12MHz之间,在本次设计中采用的10.1M 的石英晶振。
3.1.3复位电路
复位电路设计如图4紫色虚线框内所示。RST(第九引脚)为复位引脚,当有2个机器周期以上高电平时,控制器将执行复位操作。如果RST持续高水平,单片机是在一个周期的复位状态。
3.2复位电路
在键盘设计模块中,把正反转、急停、加速、减速四个开关分别与单片机的P1.0、P1.1、P1.2、P1.3端口相连,然后把它们的公共端再与地相连。其电路如图4红色虚线框内所示。其中K1:电机启动按键,K2:加速按键,K3:减速按键,K4:正反转按键。
3.3无刷直流电机测速电路的设计
使用霍尔传感器产生脉冲信号时,结构一部分将小磁钢粘在圆盘上,再将圆盘与电机同轴相连;另一部分是霍尔传感器,与电机定位好后,固定在电路板上。当电机转动时,点带动圆盘转动,转动过程中不断地产生脉冲信号[9]。若要获得多个脉冲信号,可以在圆盘上多粘几个小磁钢,并将脉冲送单片机中进计数,即可获得转速信息。
3.4电机控制正反转电路的设计
通过改变直流电压,发动机速度发生变化,本设计采用脉冲宽度调制(PWM)来实现速度控制。这里采用H桥电路来控速,如图3所示,H桥驱动电路是典型的直流电机控制电路。桥电机驱动电路由四个晶体管和一个电机组成。要想使电机转动,必须让对角线上的一对晶体管导通,电流由左至右或从右至左流过电机,从而实现电机不同方向的转动[10]。
3.5显示电路的设计
数码管是一种可以发光的半导体元件,给不同引脚输入电流会使相应引脚发光,在数码管上显示不同的数字[11]。本设计选择采用七位四段数码管来显示速度的变化,如图4所示。
3.6 系统总体硬件电路
综上所示,系统整体设计的硬件电路图如图4所示:
4 软件部分的设计
软件设计主要包括对每一个模块进行编程,使它能够实现对硬件的控制。在软件设计上,要首先考虑,我们需要实现什么样的功能,达到什么样的目的,比如在本设计中,我们需要产生PWM波,那就要想到需要什么样的软件,来产生该信号。所以在软件设计时,应定义一些标志位,比如启动标志位以及闪烁标志位的定义等。功能程序如表1所示:
软件设计的主程序流程图如图5所示:
5 仿真与调试
5.1系统仿真
仿真是在PROTEUS软件环境下结果如图6所示。在PROTEUS软件搭建好仿真电路,将程序写入单片机,运行,按下启动按键,电机转动;按下加速按键,电机转速加快,直到达到最高速度;按下减速按键,电机转速逐渐减慢,直到停止;按下正反转按键,电机可以沿着相反的方向加速或减速。电机运行结果如图11中(a)、(b)、(c)、(d)所示:
5.2系统调试
经过不断地修改和完善,设计最后基本达到了要求,当接通电源,按下启动按钮,电机可以正常运行,按下加速和减速按键,电机相应地做加速和减速变化,按下正反转按键,电机可以正转和反转。实物如图7所示:
6 总结
本文是基于单片机的无刷直流电机调速系统的设计与实现,主要完成了以下工作:
(1)介绍了无刷直流电机的结构组成、工作原理、电机调速的方法,经过分析最后采用PWM调压方式进行速度调节。
(2)根据任务要求,设计出系统的总体原路图,介绍系统控制原理。
(3)对电路硬件部分进行了设计。硬件部分包括控制单元、驱动单元、速度检测和显示电路,正反转控制电路,过流保护电路等。
(4)对电路软件部分进行了设计。首先设计出系统整体程序流程图。然后将系统分成若干个模块,分模块进行程序设计。
(5)进行了仿真调试,验证本设计能实现直流电机调速、加速、减速以及电机正反转。
虽然本文完成了系统的设计,但仍然有很大的改善空间。比如电机调速的精度,无刷直流电机运行速度较低等。相信随着无刷直流电机控制技术的发展和完善,还有很多应用潜力会被陆续开发出来,应用也会越来越广泛。
参考文献:
[1] 梁伟.单相无刷直流电机及其无位置传感器控制系统研究[D].杭州:浙江大学,2014.
[2] 王家达.基于DSP的无速度和位置传感器无刷直流电机控制系统的研究和设计[D].上海:复旦大学,2007.
[3] 陈风凯.无刷直流电机控制系统的研究与设计[D].广州:广东工业大学,2014.
[4] 王严.基于单片机的无刷直流电机控制系统设计与实现[D].南京:南京邮电大学,2013.
[5] 李伟,朱翔,奚海鑫,等.基于单片机的无刷电机控制系统设计[J].仪表技术与传感器,2011(11):74-76,79.
[6] 吴宝启,张元伟,刘阳.基于单片机的无刷直流电机控制方案设计[J].煤矿现代化,2009(6):74.
[7] 宫晓辉.关于直流无刷电机的发展状况和应用及其研究方向分析[J].世界华商经济年鉴·城乡建设,2012,19(6):167.
[8] 顾剑.无刷直流电机单片机控制调速系统设计[J].电子世界,2014(9):134-135.
[9] 卢静,陈非凡,张高飞,等.基于单片机的无刷直流电动机控制系统设计[J].北京机械工业学院学报,2002,17(4):44-49.
[10] 何晋良,欧阳昌华,廖力清.基于DSP的無刷直流电机控制系统的研究与设计[J].电子元器件应用,2010,12(9):3-6.
[11] Qiu C,Huang S,Lin Z,et al.A PWM rectifier control strategy for four-quadrant cascade converters based on complex vector pi regulators[J].Zhongguo Dianji Gongcheng Xuebao/Proceedings of the Chinese Society of Electrical Engineering,2015,35(11):2804-2812.
收稿日期:2022-03-03
基金项目:万物互联视域下物联网智慧农业系统助力乡村振兴战略脱贫攻坚应用研究(22B520032)
作者简介:韩佳芳(1991—),女,河南郑州人,助教,硕士,主要研究方向为物联网应用技术、人工智能;李雅迪(1991—),女,河南郑州人,助教,硕士,主要研究方向为物联网应用技术、人工智能;马琳琳(1992—),女,河南南阳人,中级讲师,硕士,主要研究方向为计算机应用技术;魏强(1990—),男,河南郑州人,主要研究方向为无线通信。
