基于改进蚁群算法的四足巡检机器人全局路径规划方法
2022-08-31卢朝霞
于 飞,卢朝霞
(1.山东体育学院 信息技术学院,济南 250000;2.山东大学 计算机科学与技术学院,济南 250000)
0 引言
蚁群算法的建立遵循正反馈作用机制,可以在求解数值解的过程中,使得整个搜索流程呈现出不断收敛的表现形式,最终控制数值解计算结果使其逐渐趋近最优解。在实际计算过程中,每个个体数值节点都可以通过释放信息素的方式,来改变周围区域的环境,并且每一个个体节点都具备感知周围环境变化状态的能力,个体节点以环境介质为基础来保障信息传输行为的顺利进行,这也是改进蚁群算法能够直接对数据信息参量进行处理的主要原因。与常规蚁群算法相比,改进蚁群算法对于数据信息的处理符合分布式计算思想,当多个个体节点同时进入并行计算状态时,信息参量的传输与运行速率得到了大幅促进,且启发式的搜索行为使得求取结果不会陷入局部最优解状态,便于全局最优解的准确推导。
巡检机器人是基于图像识别与OCR思想所设计出来的自动化巡检监控装置,能够准确记录路径节点所处位置,并可以借助信息反馈机制将数据记录传输回核心监测主机。受到转向位移、行进速率等外界干扰条件的影响,机器人巡检行为并不能受到绝对有效的控制,这就导致了其实际巡检轨迹与预设运动轨迹之间总是具有较为明显的物理偏差。为避免上述情况的发生,基于改进萤火虫算法的路径规划方法通过定义位移节点映射关系的方式,确定四足巡检机器人所处的运动位置,再联合其他行进度量向量,实现对路径轨迹的按需规划[1]。然而此方法对于实际巡检轨迹的调试能力有限,并不能将其与预设轨迹之间的偏离程度控制在既定数值标准之内。为解决上述问题,引入改进蚁群算法,设计一种新型的四足巡检机器人全局路径规划方法。
1 基于改进蚁群算法的机器人行进路径建模
1.1 改进蚁群算法应用流程
对于四足巡检机器人而言,实现对改进蚁群算法应用流程的完善,必须准确掌握路径信息的存储格式,并根据既定计算原则,求取待标记节点之间的实值映射关系。在实施机器人全局路径规划的过程中,路径节点之间的排列关系必须满足改进蚁群算法的约束需求,即在推导计算表达式时,标记节点的选取既要遵循改进蚁群算法原则,又必须将所有路径节点定义在同一数值区间之内。由于四足巡检机器人的运动行为并不具有专一性,所以路径节点参量在改进蚁群算法约束下的排列行为具有可循环性特征[2]。完整的改进蚁群算法应用流程如图1所示。
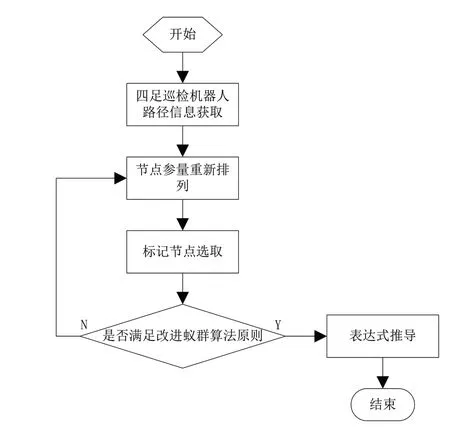
图1 改进蚁群算法的执行流程
设φ为标记节点向量,α、δ为两个随机选取的路径节点标记向量,rφ为基于向量φ的节点排列系数,rφ、rδ分别为基于向量α与向量δ的节点排列系数。联立上述物理量,可将改进蚁群算法表达式定义为:

wφ——基于向量φ的路径节点定义项;
wα——基于向量α的路径节点定义项;
wδ——基于向量δ的路径节点定义项;
1.2 路径节点分配原则
由于改进蚁群算法应用初期并不具有明显的正反馈调节作用,此时若随机选取四足巡检机器人路径节点,会存在较大的盲目性,这不但会导致改进蚁群算法的约束作用能力大大下降,还会使机器人实际巡检轨迹与预设运动轨迹之间出现较大偏差[3]。因此,为增强改进蚁群算法的收敛性能力,应选择间隔较远的路径节点作为标记参量,并以此为基础,建立完整的四足巡检机器人路径节点分配原则。
定义e1、e2为两个间隔较远的机器人巡检轨迹节点,其定义表达式如下:

其中,为四足巡检机器人路径节点的排列均值,y1为与节点e1匹配的收敛性系数,y2为与节点e2匹配的收敛性系数,ΔT为全局巡检指令的单位执行时长。
设r为e1节点、e2节点间隔步长值的最小取值结果,β为基于改进蚁群算法的四足巡检机器人路径节点分配向量,为收敛性特征均值。联立式(1)、式(2),可将四足巡检机器人路径节点分配原则表达式定义为:
在规划四足巡检机器人全局路径时,节点节点分配原则的制定必须满足改进蚁群算法的约束需求。
1.3 启发函数
在改进蚁群算法原理的基础上,定义路径节点分配原则,除了要求已选取节点向量的排列形式之外,还应联合运行速率的指标参量,建立完整的启发函数表达式。
1)运行速率
四足巡检机器人运行速率常表示为v,在稳定的行进环境中,该项指标参量的取值结果越大,表示机器人在单位时间内所能经历的路径节点越多。
2)转向位移
四足巡检机器人转向位移常表示为b,与运行速率指标相比,位移向量具有明显的方向性,当取值符号为正时,表示四足巡检机器人的运动方向为正方向;而当取值符号为负时,则表示四足巡检机器人的运动方向为负方向。
在上述物理量的支持下,联式(3),可将基于改进蚁群算法的启发函数表达式定义为:

式(4)中,β为四足巡检机器人的运行方向系数,cmiax为机器人全局路径节点启发向量的最大取值结果,cmin为启发向量的最小取值结果。为使改进蚁群算法对四足巡检机器人运动行为进行有效约束,在求取启发函数条件时,要求系数β的取值不得为负数。
2 四足巡检机器人全局路径规划
2.1 机器人运动模型
在改进蚁群算法的作用下,想要准确掌握四足巡检机器人的全局运动路径,必须根据机器人当前所处节点的x轴、Y轴、Z轴坐标,建立完整的运动模型表达式。假设四足巡检机器人不存在全向运动的可能,在既定路径区域内只能完成单纯的旋转与前进运动,则可认为在求解运动模型时,只需考虑两个相邻时刻之间机器人表现运动状态的差异性[4]。由于相邻时刻内,四足巡检机器人的运动行为满足直线运动行为的记录标注,所以在转向角数值保持不变的情况下,机器人运动角速度、运动线速度的实际取值结果均不会与速度向量的初始赋值产生较大出入。规定θ为四足巡检机器人的运动转向角,且其取值结果必须满足0°<θ<90°的定义条件。联式(4),可将四足巡检机器人的运动模型表示为:

式(5)中,x为示x轴定义条件,为x轴法向量,sinθ为转向角θ的正弦值,Y为Y轴定义条件,为Y轴法向量,cosθ为转向角θ的余弦值,Z为Z轴定义条件,为Z轴法向量,tanθ为转向角θ的正切值。由于转向角正弦值、余弦值、正切值之间存在着相互转化的可能,所以机器人运动模型x轴、Y轴、Z轴定义条件之间也存在着相互转化关系。
2.2 速度采样
确定机器人运动模型的定义标准之后,可以根据改进蚁群算法,来选择多个不同的速度参量,从而模拟出四足巡检机器人的全局运动轨迹。由于不同速度参量所对应的机器人速度采样结果也不相同,所以采用速度指标的集合空间是无限且可循环的[5]。在改进蚁群算法的作用下,四足巡检机器人的行进动力完全由电机元件提供,故而可认为动力驱动系数的物理取值越大,机器人所表现出的行进速率也就越快。设为x轴方向上的速度分向量,为Y轴方向上的速度分向量,为Z轴方向上的速度分向量,λ为机器人运动向量的全局采用系数,ϖ为基于改进蚁群算法的速度参量采样特征。
四足巡检机器人的运动速度采样表达式为:
为使速度采样结果更符合四足巡检机器人的全局运动特征,在对速度参量进行采样时,要求向量、向量、向量不能同时取得最大值与最小值结果,且三个指标参量取值不能同时为零。
2.3 步长值估算
步长值估算也叫四足巡检机器人的运动轨迹丈量。在全局路径轨迹中,步长值指标的绝对值越大,相邻路径节点之间的物理间隔数值也就越大;反之,若步长值指标的绝对值相对较小,则表示相邻路径节点之间的物理间隔数值也就越小。规定为四足巡检机器人运动步长值在x轴方向上的数值分量,为运动步长值在Y轴方向上的数值分量,为运动步长值在Z轴方向上的数值分量,X0为x轴方向上运动指标的初始赋值,Y0为Y轴方向上运动指标的初始赋值,Z0为Z轴方向上运动指标的初始赋值。
四足巡检机器人全局运动步长值估算结果为:

式(7)中,ψ为机器人单次运动步幅。实施四足巡检机器人全局路径规划时,除了要参考改进蚁群算法的作用能力之外,还应注重对步长值指标进行适当取值,一方面避免机器人出现步幅过大的运动行为,另一方面也可以实现对实际巡检轨迹、预设运动轨迹之间偏离程度的有效控制。
3 实例分析
将图2所示四足巡检机器人对象置于图3所示实验环境中,分别利用实验组、对照组路径规划方法对巡检机器人的运动行为进行检测,其中实验组采用基于改进蚁群算法的全局路径规划方法,对照组采用基于改进萤火虫算法的路径规划方法。

图2 四足巡检机器人实验对象

图3 实验环境
在图3所示实验环境中,选择3个路径位置(图3中的1、2、3)作为检测节点,记录在实验组对照组路径规划方法作用下,机器人巡检轨迹的变化情况。
机器人实际巡检轨迹与预设运动轨迹之间的偏离程度,可以用来描述所选取规划方法对于四足巡检机器人运动行为的约束能力。在参照节点所处位置保持不变的情况下,机器人实际巡检轨迹与预设运动轨迹之间的偏差程度越小,就表示所选取规划方法对于四足巡检机器人运动行为的约束能力越强;反之,机器人实际巡检轨迹与预设运动轨迹之间的偏差程度越大,就表示所选取规划方法对于四足巡检机器人运动行为的约束能力越弱。
表1给定了四足巡检机器人在x轴、Y轴、Z轴方向上的预设运动轨迹坐标。
表1中数值给定了两组不同的实验结果,就其中的记录数值来看,1号、2号、3号节点的x轴运动轨迹坐标差异性最大,其中3号节点的轨迹坐标数值最大,1号节点的轨迹坐标数值最小;Y轴、Z轴运动轨迹坐标则并没有明显差异性,但Y轴坐标的平均水平高于Z轴坐标。

表1 预设运动轨迹坐标
下表记录了在实验组、对照组规划方法作用下,四足巡检机器人在x轴、Y轴、Z轴方向上的实际运动轨迹坐标。
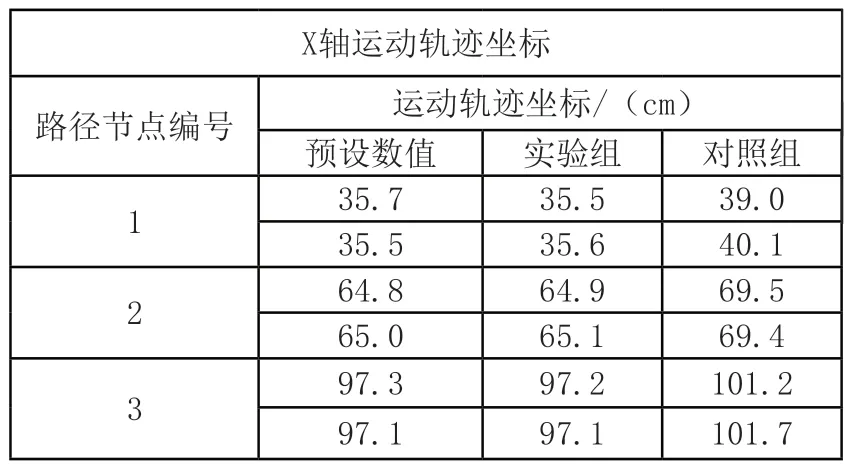
表2 实际运动轨迹坐标


预设运动轨迹坐标数值规律为:
x轴运动轨迹坐标均值:节点1—35.6cm、节点2—64.9cm、节点3—97.2cm;Y轴运动轨迹坐标均值:节点1—12.2cm、节点2—12.4cm、节点3—12.1cm;
Z轴运动轨迹坐标均值:节点1—9.9cm、节点2—9.5cm、节点3—9.7cm;
实验组数值规律为:
x轴运动轨迹坐标均值:节点1—35.6cm、节点2—65.0cm、节点3—97.2cm;
Y轴运动轨迹坐标均值:节点1—12.2cm、节点2—12.5cm、节点3—11.9cm;
Z轴运动轨迹坐标均值:节点1—9.9cm、节点2—9.4cm、节点3—9.6cm;
对照组数值规律为:
x轴运动轨迹坐标均值:节点1—39.6cm、节点2—69.5cm、节点3—101.5cm;
Y轴运动轨迹坐标均值:节点1—17.4cm、节点2—16.1cm、节点3—17.2cm;
Z轴运动轨迹坐标均值:节点1—10.3cm、节点2—16.2cm、节点3—5.3cm;
分析上述运动轨迹坐标数值规律可知,在实验组规划方法作用下,四足巡检机器人在x轴、Y轴、Z轴方向上的实际运动轨迹与预设运动轨迹之间的偏离程度始终相对较小,与基于改进萤火虫算法的路径规划方法相比,基于改进蚁群算法的全局路径规划方法能够更好约束四足巡检机器人的运动行为。
4 结语
在改进蚁群算法的作用下,新型路径规划方法首先定义了路径节点分配原则,其次根据启发函数表达式,得到机器人运动模型,最后按照速度采样结果,对步长值指标进行估算。与基于改进萤火虫算法的路径规划方法相比,在改进蚁群算法的作用下,四足巡检机器人在x轴、Y轴、Z轴方向上的实际巡检轨迹均不会与预设运动轨迹产生较大偏差,表明该方法确实可以准确约束四足巡检机器人的运动行为,更符合实际应用需求。
