基于高速公路空间几何特性的线形协调性设计评价
2022-08-31邢小亮陈雨人周可夫
邢小亮,陈雨人,李 璨,周可夫
(1.同济大学道路与交通工程教育部重点实验室,上海 201804;2.中国雄安集团基础建设有限公司,河北 保定 071700;3.交通运输部路网监测与应急处置中心,北京 100029)
公路建设是建设交通强国、完善综合运输大通道网络的重要主题。未来公路网建设将继续向发达地区优化完善、欠发达地区扩大覆盖的目标迈进,以提升路网整体运营效率[1]。而路网的加密完善不可避免地受到公路外部环境和可利用资源的影响,线形几何指标选取条件将更为苛刻。选线资源受限,可能存在设计指标即使选用规范标准极限值,路线仍具有高风险、高造价及对周边环境造成恶劣影响的状况[2]。公路灵活性设计(flexibility in highway design,FHD)[3]为弱化这一矛盾冲突提供了思路。其涉及的首要问题是指标选用对路线整体安全性、协调性等的潜在影响。然而,该理念在我国路线设计理论和总体评价等方面的渗透尚不成熟。因此,研究符合我国路网发展现状的线形协调性设计评价方法具有重要的理论意义和应用价值。
目前,针对公路线形协调性设计的研究主要集中在解决安全、环保、经济等目标间的矛盾关系上。安全性方面,研究认为运行速度是常见的线形设计一致性和协调性评价指标,复杂环境下平纵组合段的安全风险需要进行特殊论证设计[4-6]。郭忠印等[7]和闫莹等[8]从指标设计的一致性入手,提出反映公路线形空间几何特性的模型,论证了线形指标与事故率、运行速度间的相关性,为指标协调性设计的安全性评价提供一定理论支持。但受模型指标集和维度影响,资源受限条件下的协调性设计评价适用性有待进一步验证。区域资源的差异性和复杂性导致线形设计遇到各类约束问题,甚至存在超标设计(design exception)[9]状况。环境影响方面,秦晓春等[10],刘燕等[11]研究了适用于我国路网发展的灵活性设计建议及关键问题,并在部分建设项目上进行了示范性应用,但主要侧重定性分析。Ruud等[12]运用既有标准和设计方法对项目建设产生的环境影响进行协调性补偿。但研究主要侧重于项目设计和建设的定性指导,缺乏量化分析支持。经济方面,Jiang等[13]人通过成本效益分析评价认为协调性设计不仅可以节省项目成本,在旅行时间、用户效益、车辆运行安全等方面均展现出较高的优越性。此外,诸多FHD相关设计方法、模型及工具[14-15]的开发,提高了线形设计协调性评价在工程应用中的有效性。
总之,尽管国内外学者在线形设计协调性评价涉及的诸多方面进行了有益的探索,但仍存在一些不足:①涉及协调性设计评价的设计指标和评价指标选用标准并不统一,尤其是符合未来我国路网发展背景的高速公路线性协调性评价原则尚待明确。②线形模型维度的局限性限制了评价设计协调性优劣的技术手段和方法。传统二维“点+线”模型对公路三维空间模型缺乏直观描述。③指标协调性设计评价和选用涉及约束条件繁琐,综合道路平、纵、横空间信息特征的指标分析尚未达成共识。
鉴于此,有针对性地对高速公路线形协调性展开探索性应用研究是必要的。本文首先剖析了高速公路线形协调性设计指标,提出直观描述道路三维空间几何特性的曲面模型和特征参数。然后通过驾驶模拟和实车试验的方法建立空间线形影响下的运行速度差模型,以此作为评价线形几何设计协调性有效性的标准。最后提出指标选用的依据和优化建议措施,为高速公路线形协调性设计评价和指标选用提供一定指导。
1 指标分析
在线形设计中车道宽度、平曲线、竖曲线及平纵组合等指标是作为衡量线形设计安全性、一致性等的常用指标[16-18]。对比国外公路灵活性设计指南中的设计指标可知,虽各指标存在差异,但是存在多个共性设计指标,如圆曲线半径、纵坡、竖曲线等。本文研究对象为高速公路,结合路线设计理论和需求,当走廊带范围局部可用资源受到限制时,线形主要存在局部宽度不足、曲率受限、高差大、相邻道路衔接困难4类状况,产生急弯陡坡、小半径曲线及长大纵坡等不良设计路段。因此,提出优先可供协调性设计评价考虑的线形指标见表1。
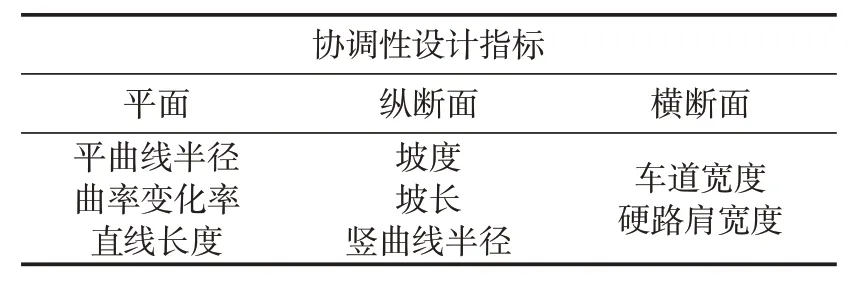
表1 高速公路协调性设计线形指标筛选Tab.1 Selection of alignment indexes for flexibility design of expressway
2 曲面模型分析
2.1 曲面构造理论
道路是由平纵线形组合形成中线后,由中线上各点沿法向切面方向向两侧延伸一定宽度形成的空间带状结构。在之前研究中[16]已建立道路三维空间拓扑结构模型和数据结构,摆脱了存在的维度弊端。为得到所需三维道路空间曲面,在线形基础上设计相应的横断面和高程信息,同时确定曲面的分段原则。
根据拓扑模型中心线元和空间拓扑曲面元(curved bin geometry,CBG)算法可知,空间曲面模型中曲面的横向宽度和超高信息是由中心线元在横向的边界平面坐标和纵向高程计算所得;同样,曲面单元的分段原理是根据中心线任一点切线与x轴正方向夹角φ、曲率k及坡度i变化确定,图1为连续上坡路段空间曲面模型。

图1 道路空间曲面模型Fig.1 Road curved surface model
2.2 参数表达
为便于公路线形空间曲面模型的应用和分析,应确定中心线元在空间内的表征参数。
2.2.1 参数选择道路中心线是由平面线形和纵断面线形组合而成的三维空间曲线,该曲线可视作直线在空间内经弯曲和扭转后形成,由曲率k和挠率τ两个参数唯一确定[19-20]。微分几何曲线理论中,k和τ是描述空间曲线几何特性和形态的两个基本变量,不同的曲率和挠率函数决定不同形状的曲线。在Frenet标架下[20],k表示曲线某一点的单位切向量相对弧长的旋转速度,表明曲线在该点的弯曲程度;τ表示相邻两点的副法向量间夹角对弧长的变化率,用于描述空间曲线相对于平面的扭转程度,其绝对值反映了曲线偏离密切平面的快慢,如图2所示。以空间曲线形式描述高速公路中心线不仅能够体现线形的空间几何特性,同时弥补了传统二维平、纵分离式线形的不足。因此,本文引用空间曲线法表征线形三维空间几何特性。
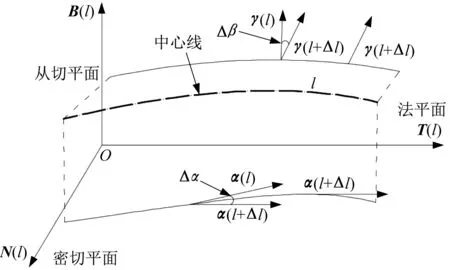
图2 Frenet标架下路中心线的曲率和挠率Fig.2 Curvature and torsion of the center line in the Frenet frame
2.2.2 空间参数表达
假定道路中心线选用弧长l(即桩号)作为自然参数,通过构建曲率函数k(l)和挠率函数τ(l)可唯一确定路线的走向和形状,据此建立高速公路空间三维线形模型。
如图2所示,在Frenet标架下,中心线自然参数方程为r=r(l),α(l)、α(l+Δl)为相邻两点的切矢量,γ(l)、γ(l+Δl)为两点的主法矢量,Δl为桩号增量,Δα为切向量夹角,Δβ为次法向量夹角。空间曲线任一点的曲率k(l)、τ(l)计算为
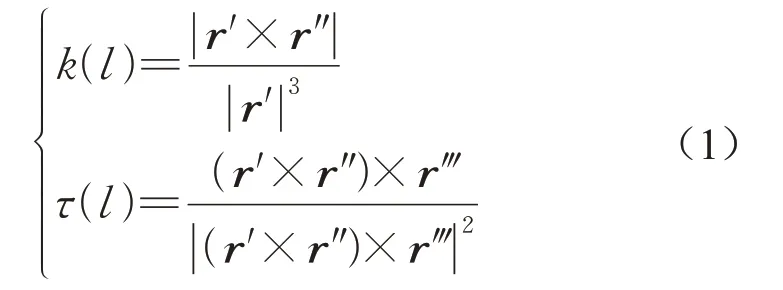
式中:r′、r′、r′′′分别为r(l)的一阶、二阶和三阶导数。
假定在直角坐标系下中心线方程为r(l)=[x(l),y(l),z(l)],则曲线任一点曲率和挠率函数表示为

空间直角坐标系下,假定曲线起点为P(x0,y0,z0),则中心线上桩号为l点的坐标为

式中:i(l)为该点的纵坡坡度;α(l)为该点在水平面上的方位角。
将平面和纵断面线形的描述方程代入式(2)中,得到中心线曲率和挠率函数。

式中:kp(l)′为曲率变化率;i(l)′为纵坡变化率,,RV为竖曲线半径,LV为竖曲线长度,i1、i2分别为变坡点前后坡度。
3 协调性设计评价
3.1 评价指标及路段划分
线形总体设计安全性、协调性研究常用相邻路段运行速度差的绝对值|Δv85|作为评价的主要标准。线形设计的协调性体现在行驶过程中驾驶员是否能及时获取到期望运行速度,局部设计不良路段,驾驶员实际运行速度与期望速度供求不平衡直接导致相邻路段的运行速度差异显著。因此,采用运行速度差作为判断协调性设计的评价指标符合实际驾驶规律要求。相关研究[21]表明|Δv85|超过20 km·h-1后,发生交通事故的概率将大幅增加。因此,将相邻路段|Δv85|不超过20 km·h-1作为评价线形设计协调性优劣的指标是合理的。
为便于对线形整体展开有效评价,将公路按不同属性进行路段划分是必要的。本文采用同质法将空间线形按平面和纵断面组合的形式分为6类:直线段-直坡段(TT)、直线段-竖曲线段(TV)、缓和曲线段-直坡段(ST)、缓和曲线段-竖曲线段(SV)、圆曲线段-直坡段(CT)、圆曲线段-竖曲线段(CV)。同时,在线形空间曲面中,将横断面信息的变化和安全设施也作为评价线形协调性评价的依据。通过计算各类路段的期望车速,得到全路线中相邻路段的期望车速分布,将运行车速相差20 km·h-1以上的路段定义为线形设计协调性不良路段,据此对各类线形指标和安全设施进行协调性设计和选用研究。
3.2 实验设计及预分析
3.2.1 实验设计
(1)驾驶模拟实验
通过SCANeR STUDIO驾驶模拟器建立4条线形相近的双向四车道山区高速公路驾驶模拟实验场景,实验段总长度为32.63 km,设计速度为100 km·h-1,场景设置见表2。按划分原则将实验段划分为235个单元,选用各单元起、终点的v85作为运行速度统计值。实验人员包括22名(14男,8女)具有丰富驾驶经验的驾驶员。
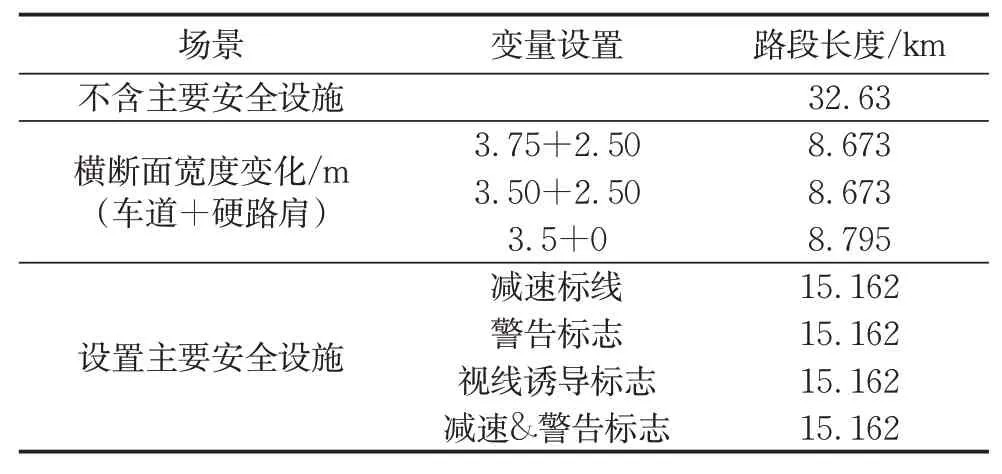
表2 实验场景设置Tab.2 Setting of experiment scene
实验过程中驾驶人首先在不含主要安全设施的路线场景中行驶,后在横断面变化(车道宽度、硬路肩)和设置不同安全设施(减速标线、线形诱导标志、警告标志、减速&警告标志)的自由流场景中驾驶(未出现违法变道或超速驾驶行为)。实验过程实时记录实验场景各单元车辆的运行速度及线形参数数据。
(2)实车试验
实车试验车型为小汽车,采用行车记录仪(GARMIN GDR35)记录包含急弯、陡坡、无硬路肩及高压跨线等典型特征的6条高速公路,路段总长约170 km,主要设计资料信息见表3。试验人员包括7名驾驶经验丰富的驾驶员,试验环境良好,且驾驶过程中均未出现违章变道、超速等行为。

表3 实车试验路段主要指标参数Tab.3 Main index parameters of real vehicle test sections
3.2.2 预分析
为确定本研究中驾驶模拟和实车试验数据样本综合分析是否具有统计意义,对两类实验所得运行速度差进行差异显著性检验。由检验结果可知,两实验测得运行速度差均不满足正态分布,所测数据速度差的峰值集中在5~7 km·h-1之间,呈现正偏态分布。这与实际高速公路中,线形协调速度差小于10 km·h-1的实际情况一致,且二者的偏度和峰度系数均大于1。因此,认为速度差不服从正态分布。
为确定两实验类型所得运行速度差均值是否具有显著差别,采用直接对比数据的非参数检验中曼-惠特尼U检验(Mann-Whitney U test),建立原假设H0为两速度差的分布在不同实验类型上相同,取显著性水平为0.05。结果表明:两实验数据均能够满足U-Test连续变量、二分类独立变量、样本分布一致前提,且输出P=0.895>0.05,接受原假设,认为两实验速度差值无显著性差异,可对实验数据进行综合分析。
3.3 评价分析
3.3.1 模型构建
(1)建模流程
收集驾驶模拟实验中无安全设施和实车试验中一般类型路段的运行速度差值与线形参数,建立多元非线性回归模型;在不利平纵组合、急弯陡坡等典型路段设置不同安全设施或修改横断面形式,对模型进行修正,最终得到反映线形设计协调性优劣的相邻路段运行速度差模型,模型设计如图3所示。
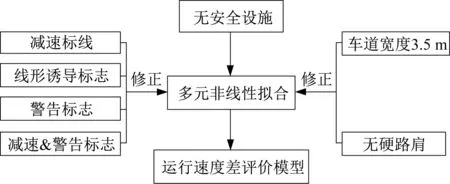
图3 模型设计Fig.3 Model design
(2)相关性分析
驾驶模拟实验输出各路段单元的运行速度,并通过式(5)计算两相邻路段的运行速度差。

式中:Δv(i85)为相邻路段单元的运行速度差值;为任意相邻路段的运行速度均值。
选用相邻路段的曲率差Δki和挠率差Δτi作为线形设计的指标参数,计算为
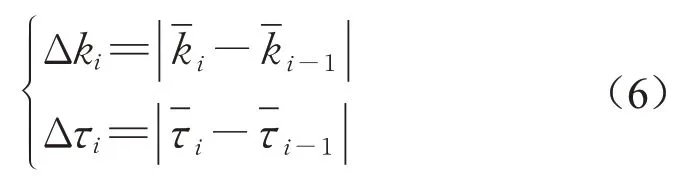
为解释线形单元各参数计算原理,以实验中平纵组合段为例进行说明,如图4所示。
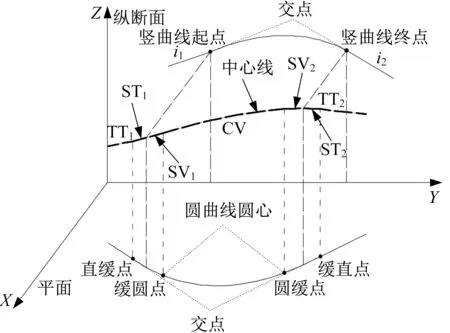
图4 平纵组合路段单元划分示意Fig.4 Unit division of horizontal and vertical alignments
该路段包括ST1、SV1、CV、SV2、ST2等5个单元。ST1和SV1相邻单元的Δv1(85)、Δk1、Δτ1计算为
结合实验数据可知,曲率k的变动程度较挠率τ更明显,Δτi主要在0值附近浮动,而Δki随里程的推进呈现出频繁变动的状态。结合k、τ对空间曲面的影响,分析其原因主要是实际项目建设中平曲线出现的频率远高于竖曲线。在平面线形中,对应竖曲线位置处Δτ发生明显突变,且一般出现在与缓和曲线组合位置,Δk的突变位置与Δτ基本吻合,Δv85受Δk、Δτ叠加作用影响呈相似规律变化。为确定三者相关关系,采用偏相关分析(partial correlation analysis)建立原假设H0:Δk、Δτ与Δv85不存在显著相关关系,取假设检验的显著性水平为0.05。由计算结果可知,三者相关性系数R2均大于0.7,且显著性水平小于0.05,拒绝原假设,认为相邻路段Δk、Δτ与Δv85具有显著相关性。
为进一步说明运行速度差和曲率差、挠率差的关系,绘制相邻单元3个参数散点分布图,见图5。
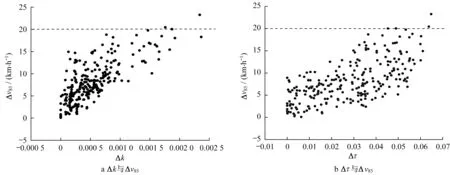
图5 Δk、Δτ与Δv85的散点分布Fig.5 Scatter plot ofΔk,Δτ,andΔv85
由图5中散点分布可知,Δki、Δτi与Δv85间均存在明显的正相关关系,即当空间路线的Δki、Δτi变化越大,驾驶员在该路段上的运行速度变化越明显。Δv85受Δk和Δτ的影响,其差值呈先增后减、再增再减的状态,且在一定范围内,Δk的影响程度明显高于Δτ。但当Δτ继续增大,即空间线形扭转程度(坡度)变动增大,其对Δv85的影响作用愈加明显,直接影响驾驶员在路段上的行驶安全性。
(3)建模分析
为评价线形空间参数对设计协调性的影响,在剔除异常数据值后进行多元非线性拟合建模。鉴于Δk和Δτ可能存在的多重共线性对模型结果的影响,首先对两线形参数进行多重共线性检验。由检验结果可知两自变量方差膨胀系数(variance inflation factor,VIF)=1.061<10,容忍度(tolerance)>0.1,说明Δk和Δτ的多重共线性和内生性较弱,可用于多元非线性拟合建模。取常用的多项式(Poly)、高斯(Gaussian)及对数正态(LogNormal)函数进行拟合分析,如图6所示。
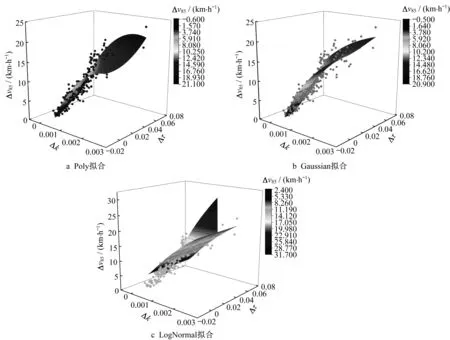
图6 多元非线性拟合Fig.6 Multivariate nonlinear fitting
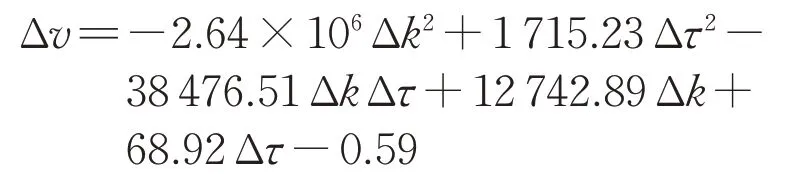
结果显示在95%置信区间下,p=0<0.05。由收敛性和拟合优度分析可知,LogNormal函数拟合优度最差,Gaussian拟合效果不错,但未收敛。因此,确定一般路段选用Poly函数作为Δv与Δk、Δτ函数关系模型,即
3.3.2 模型修正
调整模拟场景中横断面和安全设施变量条件,分析不同场景下运行速度差变化,并对模型进行修正,输出结果见表4。
由表4可知:车道宽度修改为3.5 m时,Δv85增加为原来的0.246%,运行速度变化较小,因此对原模型不作修正;当不设置硬路肩,改为均匀布设港湾式停车带时,Δv85减小3.69%。由此可知,无硬路肩设置时,驾驶人倾向选择更为安全的速度行驶,运行速度离散性降低;设置不同交通安全设施时,Δv85均呈现不同程度降低,其中减速标线和警告标志同时设置时Δv85降低程度最明显,线形整体安全性和协调性较好。基于此,确定综合横断面变化和交通安全设施设置条件下的线形设计协调性运行速度评价模型为
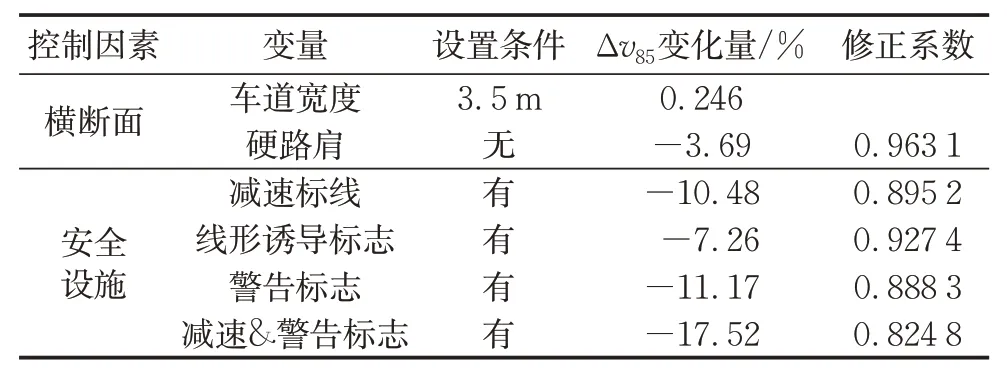
表4 模型修正Tab.4 Modification

式中:ci为模型修正系数;i为不同受限条件,i=1,2,3,4,5,6,分别对应一般路段、无硬路肩、减速标线、线形诱导标志、警告标志、减速&警告标志,对应ci分别为1、0.963 1、0.895 2、0.927 4、0.888 3、0.824 8。该模型能够充分反映相邻路段的Δv85与Δk、Δτ的对应关系,指导道路空间几何线形的协调性设计。
4 指标选用及优化
为提升评价模型在几何设计指标选用和优化中的适用性,提出以可靠度作为综合判定设计指标选取的依据,以相邻路段空间线形曲率差和挠率差共同影响下的运行速度差20 km·h-1为临界失效面,即失效概率(Pf),通过目标可靠度反推一定Pf条件下路段Δk或Δτ的选用建议。通过蒙特卡洛仿真(Monte Carlo)计算分析当Pf为0、5%、10%、15%时各路段Δk或Δτ的取值范围,以此作为几何设计指标灵活确定的准则。如图7所示,若两相邻路段Δk在(0,0.001 5)内,当指定Pf为0时,Δτ值的取值范围为(0.050 0,0.051 6)。同理,当Pf分别为5%、10%、15%时,Δτ范围分别为(0.0500,0.0533)、(0.0500,0.054 9)、(0.050 0,0.056 4)。一定失效概率下的参数取值范围设定不拘泥于规范中传统确定性指标值、极限值及模糊范围的限定,可为高速公路线形指标选取提供足够的协调性。
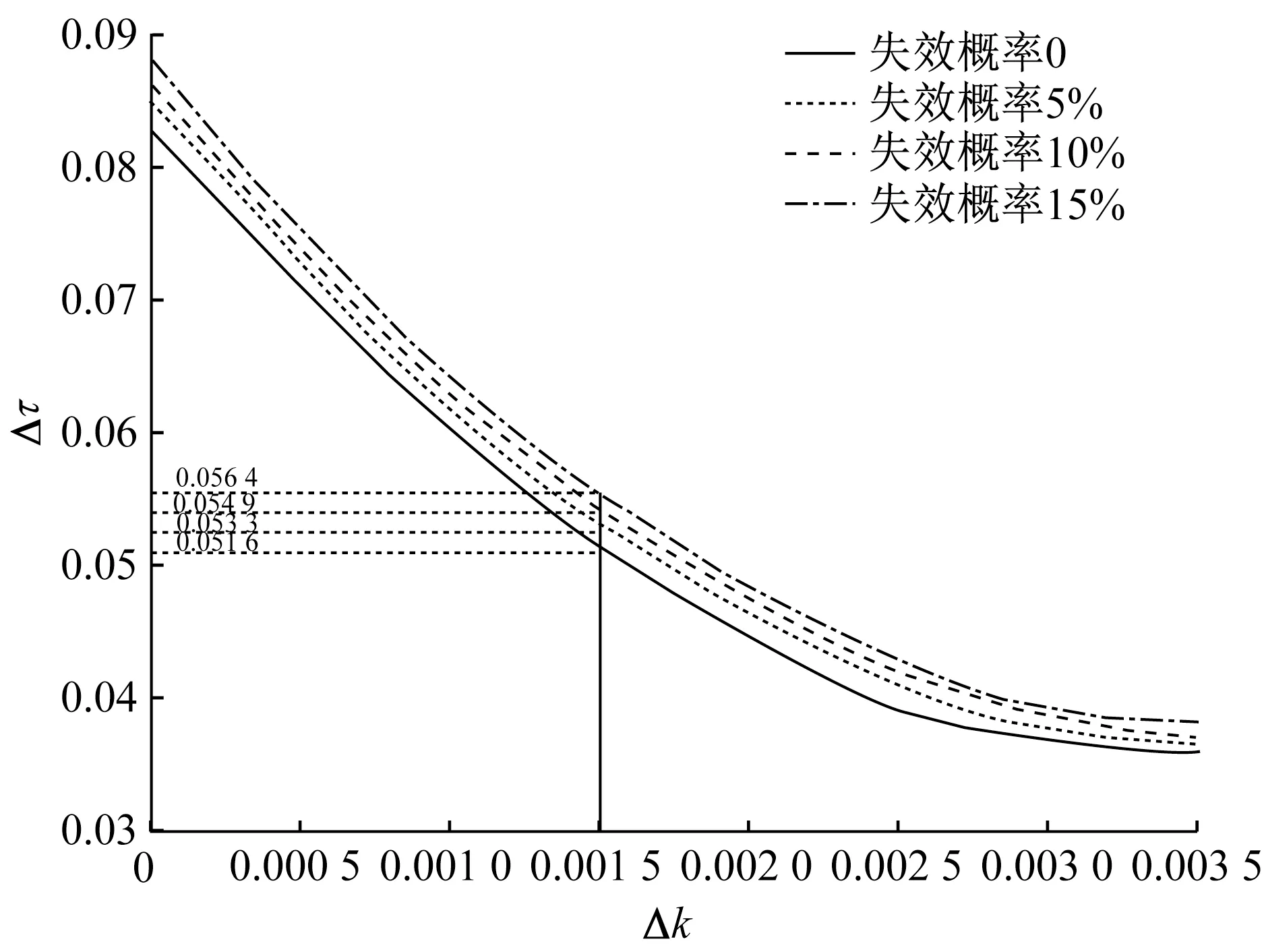
图7 不同P f对应的空间参数取值Fig.7 Values of spatial parameters corresponding to different P f values
根据空间线形参数指标与运行速度差关系模型和可靠度分析,可知相邻路段Δk和Δτ值越大,对应Δv越大,失效概率越高,反映出线形设计的协调性越差。为尽量避免相邻路段的k、τ差值过大,分析并汇总不利平纵组合的主要影响因素及改进措施如表5所示。

表5 平纵线形组合路段影响因素和改进措施Tab.5 Influencing factors and optimization measures of horizontal and vertical combined road sections
受k和τ控制的不同类型路段在空间内的组合对线形设计协调性的影响存在差异,主要影响的线形指标有圆曲线半径、竖曲线半径、缓和曲线与竖曲线叠加长度等。平面和纵断面线形中k均体现出较强的敏感性,τ对纵断面线形的影响较为显著,特别是SV组合段。因此,在平纵设计中应特别论证竖曲线与缓和曲线叠加位置处的指标调整与选取,注意控制易引发空间线形突变的设计指标(表6),这些指标的具体取值需要参考提出不同Δk、Δτ组合后的失效概率。
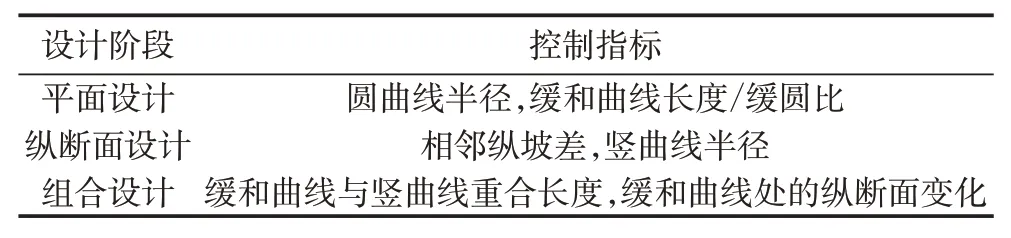
表6 不同设计阶段的相邻路段控制指标Tab.6 Control index of adjacent road sections in different design stages
由前述空间线形分析可知,缓和曲线处的k、τ变化明显,缓和曲线虽然能避免直线与圆曲线直连时的平面曲率不连续,但不可随意确定其长度及与纵断面线形的组合形式。此外,当平曲线与竖曲线邻近时,为使线形更加平顺、连续,常采用“平包竖”(竖曲线的起终点位于缓和曲线内)的组合方式进行设计。而由Δτ分析可知,SV组合会导致相邻路段的τ突变,除选用较大的竖曲线半径值外,还需注意竖曲线与缓和曲线的组合长度不宜过大,减少缓和曲线上的纵断面线形变化。
5 结论
本文在考虑高速公路线形设计安全性、协调性等因素基础上,提出优先可供协调性设计的线形指标,综合道路空间曲面模型参数表达和协调性评价指标,建立相邻路段运行速度差与空间线形曲率差、挠率差关系评价模型,并通过可靠度分析提出线形指标选用的依据和设计建议。主要结论有:
(1)由驾驶模拟实验和实车试验结果分析可知,在一般路段平面线形中,对应竖曲线位置处Δτ发生明显突变,且常出现在与缓和曲线组合位置,Δk的突变位置与Δτ基本吻合。同样,Δv85受Δk、Δτ叠加作用影响呈相似规律变化。由相关性分析结果可知,相邻路段Δki、Δτi与Δv85存在显著正相关关系。建立了一般类型路段Δv与Δk、Δτ的线形设计协调性评价模型,拟合优度为0.85,拟合结果良好。
(2)通过调整横断面和交通安全设施场景设置对运行速度差模型进行了修正,提高了评价模型的普适性。研究表明,无硬路肩和设置交通安全设施环境,Δv85均呈现不同程度降低。其中减速标线和警告标志同时设置时Δv85降低程度最为明显,各类变量环境设置对应的修正系数ci分别为0.963 1、0.895 2、0.927 4、0.888 3、0.824 8。
(3)通过可靠度分析得到一定失效概率下相邻路段Δk或Δτ参数取值范围,为线形设计提供足够的协调性选取依据。分析并汇总出不利平纵组合的主要影响因素,并提出改进措施,为指导高速公路线形指标设计提供一定参考。
(4)由于线形几何设计背景环境复杂,未来研究仍需根据实际项目和科研需求扩充和细化主要线形指标集和交通安全设施,提高指标设计和选用的普适性。由于时间和条件限制,本文仅采用相邻路段运行速度差作为协调性设计评价指标,且驾驶模拟实验设定车型较为单一,后续研究将补充设计速度与运行速度差值关系分析以及大型车对线形协调性的潜在影响。同时,超标设计是公路灵活性设计理念中与协调性设计相关的热点问题,下一步计划通过运行速度分布和期望分布对其展开评价分析和阈值标定研究。