一种用于参加大学生竞赛的码垛搬运起重机器人
2022-08-30陈润林郭蓉翟俊杰何启华姜超张悦
陈润林郭蓉翟俊杰何启华姜超张悦
(1.沈阳工业大学机械工程学院 辽宁沈阳 110870;2.沈阳工业大学电气工程学院 辽宁沈阳110870)
2021年3月,中国高等教育学会高校竞赛评估与管理体系研究工作组发布了2020全国普通高校大学生竞赛排行榜。本轮大学生竞赛排行榜根据获奖贡献、组织贡献和研究贡献3个方面相关数据进行排行,总计有57项竞赛项目列入排行榜。中国大学生起重机创意大赛是其中之一,通过设计机械结构、控制系统、编程等实践,提高大学生科技创新能力[1-2]。
设计的起重机器人旨在参加第六届中国大学生起重机创意大赛,基于机器视觉,识别特定图形的形状和颜色的算法、激光传感器定位、双平行四边形机械臂设计并实现了能够完成比赛要求的起重机器人[3-8]。
1 机械结构
起重机器人的整体建模如图1所示。该机器人的底板正上方设有用于控制机器人机械臂旋转的舵机DS3230,舵机DS3230的正上方设有上顶板,舵机DS3230通过舵盘连接有小齿轮,小齿轮的外周啮合有齿圈,齿圈与其上方的内圈丝孔外沉头孔轴承XRU8022XUUCC0P5的内圈及内圈丝孔外沉头孔轴承上方的机械臂底座通过螺栓连接,内圈丝孔外沉头孔轴承的外圈与其下方的上顶板通过螺栓连接。机械臂大臂一端的两侧分别连接两个舵机DS516,机械臂大臂的另一端连接机械臂小臂的一端,机械臂小臂的另一端通过机械爪座连接舵机DS3120,舵机DS3120通过舵盘和与机械爪的爪根连接的舵机DS3120连接,起重机器人的实物如图2所示。

图1 起重机器人的整体建模图

图2 起重机器人的实物图
2 控制部分
主控板采用RoboMaster开发板C型,主控芯片为STM32F427IIH6。控制部分采用STM32单片机控制3个电机驱动底盘运动和5个舵机驱动机械臂运动[9-10]。电机采用RoboMaster M2006,搭配相应的C610电调,其具有额定转矩大、减速比小、相对转速高的优点,采用CAN总线控制。视觉部分由OpenMv模块提供,其是ov摄像头与STM32H7的结合,与主板进行串口通信。因为其较高的开源性、封装性,OpenMV模块极其适用于视觉识别要求不高、环境较为固定的识别场合。OpenMV模块在本设计中完美地承担了视觉任务,简单、体积小、开源、准确性高是简单视觉识别的不二选择。使用时,RoboMaster开发板C型和RoboMaster电调中心板两对、两个舵机DS3120、两个舵机DS5160、1个舵机DS3230、3个电机M2006全自动控制。
2.1 底盘的控制
底盘运动由3个全向轮[8]控制底盘运动。其物理建模过程如下。假设轮子无打滑,建立如图3所示的底盘坐标系和世界坐标系。
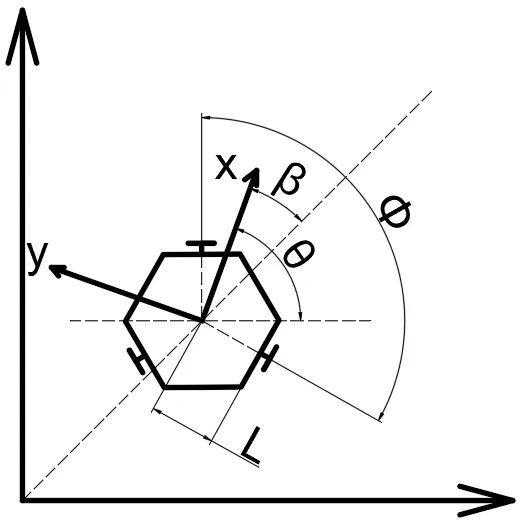
图3 底盘坐标系和世界坐标系
图3中,θ为机器人坐标系与世界坐标系之间的夹角;Φ为全向轮之间的夹角,本设计方案中Φ=120°;L为机器人中心到轮子理论中心的距离:

2.2 机械臂的控制
机械臂部分采用双平行四边形机械臂控制模型,其采用5个舵机进行驱动。机械臂控制分析如图4所示。

图4 机械臂控制分析图
本设计中,由于需要搬运物体位置一定,只需进行运动学反解即可做到抓取控制,经过运动学反解可得到:

由于其具有末端执行器始终平行于地面的优点,其经常用于码垛机器人,其灵活度较高且因为双平行四边形的优点前臂和大臂的驱动舵机均在机械臂的底座上且不产生运动干涉,大大减少了机械臂的倾覆力矩,且双平行四边形机构承载能力较平常机械臂大,但因为其复杂的逻辑控制精度相对较低且稳定性较低,数字舵机的驱动使其不适合于重载高速的运动场合。
2.3 车体及机械臂运动轨迹规划
在车轮与地面无相对滑动时,车体的运动位置精度可由编码器采集车轮所转圈数而得,但车体在场地的绝对位置无法得知,且无法保证车轮与地面无相对滑动。本设计中,采用3个摩天L1保证车体位置。摩天激光采用串口信号与单片机进行通讯,可获得激光发射器与障碍物(物体表面不包含镜面反射)之间的距离。而本设计中,由两组平行、一组垂直激光、垂直激光与两组平行激光正交来获得车体在场地中的位置,以及保证车体在场地中运动轨迹,且由激光可以减少车轮打滑带来的累计误差对行动的影响。由两组平行激光作为车体运动的y轴,垂直激光作为车体运动的x轴,通过两组平行激光对某一障碍物的距离比较,可判断车体的运动学y轴某一瞬间和场地y轴的角度关系,由平行激光和垂直激光,可确定车体在某一瞬间的移动位置,由角度和距离,可得车体在场地平面的绝对位置,以达到运动轨迹的控制。
激光的本身精度高,其量程为40m,在量程距离的测距精度可达到1mm,且测距激光的成本低,3个激光的成本远低于激光雷达等位置传感器,且满足本设计运用场合的精度需要,较其他位置传感器而言,测距激光的运用简单,精度不弱,适合本设计所运用场合。
但由于车体本身具有惯性,以及通信时间的考虑,具体车体运动精度在保证车体运动效率及流畅的情况下,低速运动状态下(运动速度小于0.3m/s)车体运动精度可达到厘米级;高速运动状态下(运动速度大于0.3m/s)车体的运动精度可达到3~5cm,不追求运动效率的情况下精度可达3mm以下。而本车适合承担比赛场地、小场地的搬运任务,速度条件及精度条件完全适合。
由于机械臂需要知道自己的抓取方向及抓取位置,而机械臂的关节精度由数字舵机本身的精度决定,所以机械臂的抓取绝对精度则取决于机械臂相对于车体的位置关系精度,其由15位多圈绝对式编码器可知。15位编码器可记录刻度为215,其可通过CAN总线发布相关命令设置编码器的零点和中点(即214)所在。多圈记忆使其具有掉电记忆能力,不需在此方面做额外供电,以保证电路安全。此编码器具备掉电记忆功能,所以其可记录某一时刻机械臂关于车体的旋转精度,其可接受CAN总线、RS485等信号的通信,有体积小、重量轻、占用资源少、功耗低等优点,其线性度为1‰,即0.01°,将编码器机械中点设置为与车体y轴同方向,即可保证机器人可得知自己的抓取方向和位置而做出相应的调整。
在使用绝对式编码器时,机械臂的旋转速度不易过大,否则易导致编码及记录不准,但本设计由于力臂过长,机械臂的旋转速度本就不易过大,所以使用绝对式编码器十分适合本设计,且经济实惠,精度高。
在车体运动及抓取过程中,存在着对位置进行调整的过程车体的发车位置调整,由于通信频率和激光测距的精度,存在调整死区。车体的调整移动速度不宜过快,否则存在摇摆、超限等问题。而且虽然两平行激光距离较近,但由于车体本身结构所限,两激光中间仍有距离。若两激光中间存在物体,则会对车体的位置调整产生误差,导致一定概率下车体难以调整到所需要的状态,所以车体的调整需要多次进行。虽然降低了车体的移动效率,但是对车体的精度,完成任务的问题性具有较大的改善,且车辆起步应缓慢加速而不应过高的起步速度导致车轮丢装或装载物体惯性过大,导致影响车体的运动精度和机械臂的抓取精度。
机械臂则存在对准过程,如果使用绝对式编码器对机械臂的旋转进行控制,则会导致机械臂旋转存在超限和死区,而将控制旋转精度分为利用电机编码器快速控制和用绝对式编码器进行慢速校准两个过程,则能解决上述问题,且有良好的控制精度。再将车体及机械臂校准同时进行配合校准,使整体任务精度进一步提高,完成车体任务精度的控制。至此,完成本设计对于场地抓取任务、搬运任务的控制要求及精度要求。
3 结语
本文首先对起重机器人的机械结构进行设计,然后对机器人底盘和机械臂的控制方案进行了分析。本机器人能很好地完成第六届中国大学生起重机创意大赛的比赛任务,能够一次性搬运并堆码6个相同的特仑苏牛奶箱,提高了搬运和堆码的效率,实用性较好;机械臂采用双平行四边形的结构,保证机械爪的轴线始终垂直于地面,保证了抓取的稳定性。
