基于系统辨识法的航空发动机建模与应用
2022-08-30吴星星
吴星星
(贵州贵飞飞机设计研究院有限公司,贵州 安顺 561000)
在进场下滑过程中,使用反区操纵技术的飞机需要使用油门来控制飞机下滑轨迹[1-2],《舰载机着舰规范》[2]明确规定了飞机对油门指令响应能力,即小油门特性的具体要求。为检验飞机小油门响应是否满足规范要求,需要建立发动机数学模型来进行飞机小油门响应特性仿真计算。
航空发动机建模方法通常分为部件法和系统辨识法两大类。部件法根据发动机工作原理基于结构力学、空气动力学、热力学等关系式建立各部件的非线性方程组,采用迭代法求解方程组从而得到发动机模型[3-5]。系统辨识法将发动机系统作为一个整体,根据油门杆输入和推力、转速等输出的变化关系将发动机系统用传递函数模型代替,利用地面试车试验数据或空中飞行试验数据辨识模型结构和参数。系统辨识法重点在于模型的选择、辨识方法的改进等方面。目前,航空发动机建模常采用部件法[6-7],特别是在发动机研制过程中,部件法建模仿真可对发动机各部件动态特性进行设计验证,缩短研制周期,减少研制成本。但部件法原理复杂,存在部件级模型精度受部件特性数据少的限制,模型非线性方程组复杂程度高、迭代计算时间长、计算量过大和迭代收敛慢甚至发散等问题。在飞机运动建模仿真或飞控系统控制律设计中只需考虑发动机转速、推力等对油门杆输入的动态响应特性即可,不必关心发动机各部件运行状况,可采用更高效的系统辨识法建立发动机等效传递函数模型。本文根据系统辨识法原理,选取一阶系统和二阶系统传递函数模型,使用某型发动机地面台架试验数据,采用动态系统辨识中常用的极大似然参数估计法辨识模型参数,通过最终预测误差(FPE)、最优适配度(Best Fit)等判断模型准确性,确定发动机模型后建立飞机纵向运动仿真模型对飞机小油门特性进行仿真分析。
1 系统辨识法
1.1 系统辨识过程
系统辨识是研究如何利用系统含有噪声的输入和输出数据建立系统数学模型的学科[8],所获得的模型与系统的近似程度取决于对系统先验知识的了解,以及对数据、模型和准则函数的掌握和运用。系统辨识过程主要包括系统试验、试验数据处理、模型结构辨识、参数估计和模型检验等,其基本流程如图1所示。

图1 系统辨识的基本流程
为获取发动机系统输入输出数据,在地面试车台上开展了不同低压转速下的阶跃油门推力响应试验。试验选取了4个低压转速状态(分别为NL1、NL2、NL3和NL4,各转速状态依次增加5%),进行推油门杆和收油门杆的阶跃操纵,使低压转速增加或减小约5%,其中NL1转速状态推油门和收油门的试验数据如图2和图3所示,图中ΔδT为油门杆角度变化量,ΔT为推力变化量。由于测量干扰影响,采样数据通常需要进行滤波处理,本文采用高精度傅里叶变换算法对推力响应数据进行了滤波。
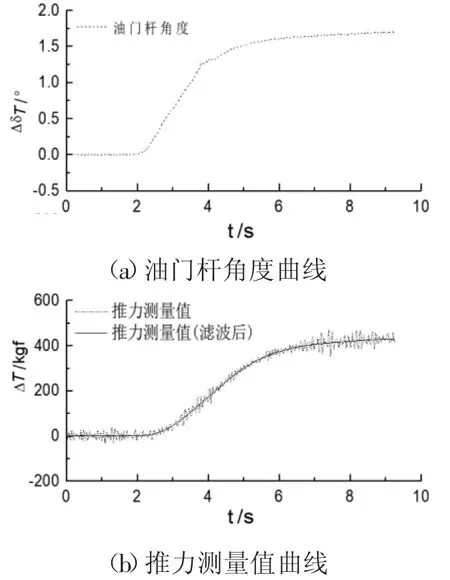
图2 推力响应试验数据(推油门)

图3 推力响应试验数据(收油门)
根据动态系统的时域分析法,从推力响应时间历程曲线可以看出,该发动机系统可等效为一阶系统或过阻尼二阶系统,传递函数分别见式(1)和式(2),其单位阶跃响应时域表达式分别为式(3)和式(4)。
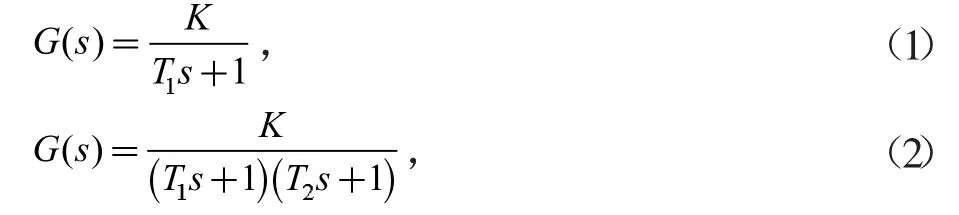

式中:K为增益;T1、T2为时间常数。
1.2 辨识方法
极大似然法基于测量噪声服从高斯分布的假设,若测量值为Z(t),则噪声似然函数的负对数为

式中:Y为模型含参数θ的输出值;N为每次试验测量的数据个数;M为独立试验的次数。
对式(5)求偏导并令其等于0,则得到

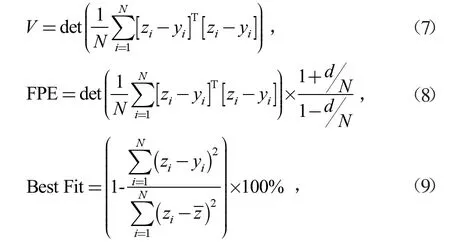
采用式(7)作为代价函数进行迭代计算使代价函数值最小,以最优适配度(Best Fit)、最终预测误差(FPE)等模型评价准则确定模型结构、判断参数辨识结果的准确性[9]。
2 辨识结果与分析
2.1 发动机模型辨识结果
根据上述原理,为确定发动机模型结构,利用低压转速NL1状态推油门、收油门和NL2状态推油门、收油门的试验数据分别按一阶和二阶2种等效模型结构进行参数辨识,结果见表1。
从表1可以看出,转速NL1状态收油门和转速NL2状态推油门试验数据使用一阶系统和二阶系统的最优适配度都较高,最终预测误差都较小,但二阶系统中有一时间常数很小,基本为0。当二阶系统中的一个时间常数远大于另一时间常数时,该二阶系统可以等效为一阶系统,因而采信一阶系统的辨识结果。从转速NL2状态收油门辨识结果可以看出,使用一阶系统的最优适配度和最终预测误差都优于二阶系统。从转速NL1状态推油门辨识结果可以看出,使用一阶和二阶系统模型都较准确,二阶系统模型略优于一阶系统。
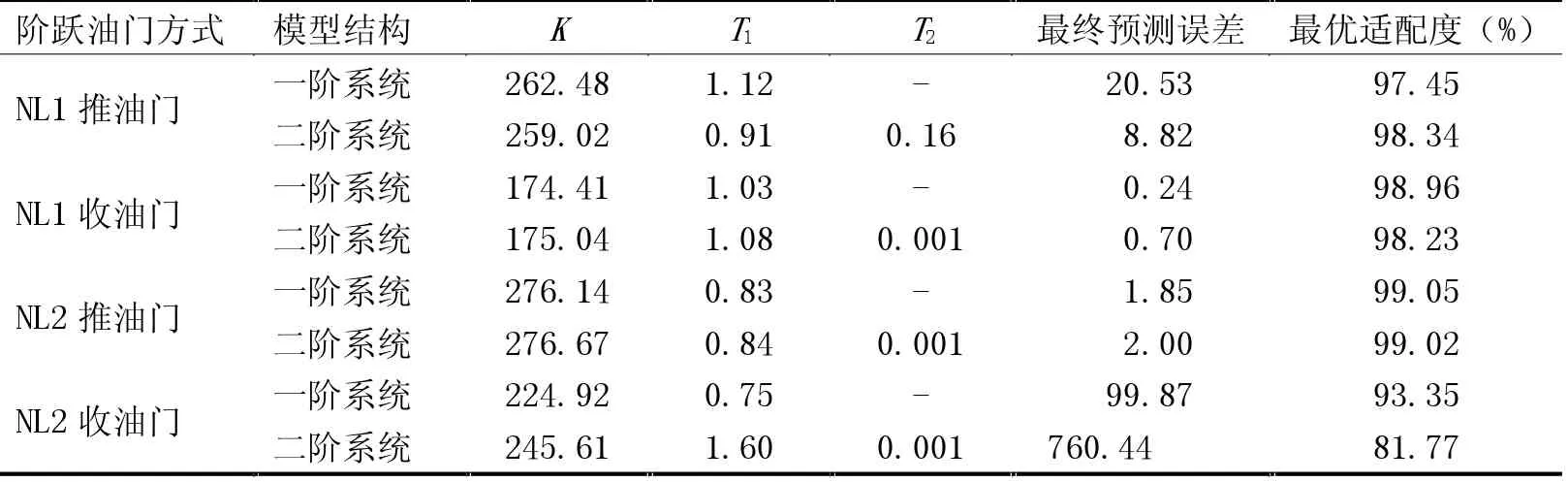
表1 2种模型结构的参数辨识结果对比
综合转速NL1和NL2状态推油门和收油门辨识结果,选择一阶系统作为该型发动机等效模型结构,其中转速NL1状态推油门和收油门一阶系统辨识结果与试验测量结果的对比分别如图4和图5所示,从图中可见辨识结果和测量值重合度高。

图4 模型输出与测量值对比(转速NL1推油门)

图5 模型输出与测量值对比(转速NL1收油门)
转速NL3和NL4状态按一阶模型参数辨识的结果见表2。

表2 发动机模型参数辨识结果
2.2 小油门特性仿真
舰载机进场着舰时处于低动压状态,飞机处于阻力曲线“背区”,导致轨迹稳定性降低甚至失稳,无动力补偿时飞行员需要采用“反区”操纵技术精确控制飞机的轨迹[10],即通过油门控制下沉率,驾驶杆控制迎角。
因而在3.5°~4°光学下滑道上,需要频繁使用油门进行调整,当下滑道偏低时,应推油门并小幅柔和向后拉杆;当下滑道偏高时,应收油门并小幅柔和向前推杆。可见“反区”操纵要求发动机对油门输入要有足够的响应速度,从而使飞机具有良好的小油门特性。着舰规范对舰载机小油门特性的具体要求为[2]:当油门指令输入后,1.2 s时间内使飞机纵向加速度达到指令要求±0.120 g的90%,在整个下滑道的进场控制中,油门的输入始终要达到这个要求。
舰载机设计必须满足小油门特性要求,在方案阶段和详细设计阶段都应对小油门特性进行仿真计算,为此需要建立准确的发动机模型,一是用于仿真计算小油门特性达标情况,二是用于小油门特性鉴定试飞前预估使纵向加速度达到规范要求所需的油门操纵量。
本文使用基于系统辨识法建立的发动机模型,在Matlab/Simulink仿真环境中建立飞机纵向运动仿真模型。根据发动机推力与低压转速对应关系,在给定下滑速度和下滑角的情况下,通过调整减速板组合状态或减速板开度使飞机进场下滑时的低压转速分别处于NL1、NL2、NL3和NL4状态,并分别进行同等油门杆阶跃量的推油门和收油门操纵实时仿真。采用保持迎角不变的操纵策略,推油门使飞机纵向加速度增加,收油门使飞机纵向加速度减小,仿真得出的飞机纵向加速度时间历程曲线如图6所示。从仿真结果可以看出,转速在NL1至NL3范围内推油门,飞机小油门特性满足规范要求,在NL4状态推油门不满足规范要求;转速在NL3至NL4范围内收油门满足规范要求,在NL1和NL2状态收油门不满足规范要求。因此转速在NL3时飞机小油门特性能够满足规范要求。

图6 飞机纵向加速度时间历程曲线
3 结束语
采用基于系统辨识法的发动机建模方法,将发动机等效为一阶传递函数形式,辨识结果与试验数据最优适配度高,建模方法行之有效,模型准确。基于Matlab/Simulink的飞机小油门响应特性仿真,计算了飞机进场下滑时不同低压转速下飞机对油门指令的响应能力,仿真结果表明低压转速在NL3满足规范要求,转速NL4推油门飞机纵向加速度增量小,不满足规范要求,转速NL2和转速NL1收油门飞机响应慢,不满足规范要求。
本文通过仿真计算给出了满足规范要求的下滑转速,由于实际推力需经进排气修正、大气修正,且在同等重量、表速和下滑角的情况下,在一定转速范围内飞机小油门响应与油门杆阶跃操纵量有关,因此实际满足规范要求的转速范围需通过鉴定试飞方式给出,但本文研究结果对飞机减速板开度设计及减速板组合状态设计具有重大的参考价值。
