直驱式永磁同步电机改进型无差拍直接转矩控制研究*
2022-08-30马祖阳王晓璨林晓刚周晓莹
马祖阳, 王晓璨, 林晓刚, 解 伟, 周晓莹
(1.厦门理工学院 电气工程与自动化学院,福建 厦门 361024;2.中国科学院海西研究院 泉州装备制造研究所,福建 泉州 362000)
0 引 言
传统的永磁同步电机(PMSM)加机械减速机构的驱动系统存在结构复杂、减速机构易磨损、润滑油渗漏、运行可靠性差、维护成本高以及系统整体效率低等缺点[1],不符合节能环保的要求。采用直驱式永磁同步电机(DD-PMSM)替代传统的驱动系统成为国内外学者的共识[2]。根据转子位置的不同,PMSM分为外转子同步电机和内转子同步电机。对比内、外转子同步电机性能,外转子同步电机具有低速大转矩的特点[3]。DD-PMSM在驱动负载时,不需经过传动装置(如传动皮带等),具有静音、节能、动力强劲等特点。根据其工作特点,DD-PMSM通常采用外转子PMSM[4]。
DD-PMSM在实际应用中需要实现对给定位置信号的快速响应,同时因其直接驱动负载的结构,负载产生的转矩波动会直接影响控制系统的性能[5-6]。为提高电机的运行性能,文献[7-11]针对上述问题展开了研究。文献[7]基于无差拍预测控制提出了一种新的PMSM电流控制方法,具有易于实现等优点,但整个系统设计的控制效果不能满足DD-PMSM在实际应用中的需求。文献[8]提出无差拍直接转矩控制(DB-DTC)和模型预测控制结合的控制策略,提高了系统的响应速度和控制精度,但是两种先进算法的复合控制,使系统的计算过程过于复杂,导致系统的稳定性下降。文献[9]在传统DB-DTC的基础上引入状态观测器对系统变量进行观测,以提高系统的控制性能,但其数学模型建立在旋转坐标系中,在定子参考电压的求解中需要进行多次坐标变换,同时需要反复求解一个一元二次方程,实时计算量大。文献[10]提出了一种将空间矢量调制与模型预测控制相结合来实现无差拍控制的方法,有效降低开关损耗,但是降低了系统的响应速度。文献[11]采用阻抗控制设计新型PI控制器,对比传统PI控制器,其控制系统力矩控制的误差降低了1.64%,但控制算法在面对复杂环境时应用较少。
针对上述控制策略的不足以及DD-PMSM的实际工况,本文提出一种改进型DB-DTC策略。相对于传统DB-DTC策略,所提改进型控制策略直接在静止坐标系中构造算法模型,根据离散电磁转矩表达式计算出负载角参考值,然后由负载角参考值计算出定子磁链在静止坐标轴上的增量,进而求出在静止坐标轴上的定子参考电压,使电磁转矩和定子磁链在一个控制周期内误差为零。本文提出的改进型DB-DTC避免了传统DB-DTC在定子参考电压的计算中需要进行多次坐标变换,以及反复求解一元二次方程的弊端,降低了控制策略的计算量,简化了控制流程,降低了电机运行时的转矩波动。文中介绍了传统DB-DTC和改进型DB-DTC的推导过程,同时将改进型DB-DTC结合位置型阻抗控制,验证所提控制策略在复合控制情况下的动态响应性能。最后通过仿真验证所提控制策略的可行性和有效性。
1 DD-PMSM的数学模型
外转子PMSM是一个强耦合、复杂的非线性系统,通过Clarke和Park变换将控制平面由自然坐标系变换为同步旋转坐标系,将外转子PMSM模型变为他励直流电机模型,实现电压与电流解耦控制。
假设外转子PMSM为理想电机,且满足下列条件:
(1) 忽略电机铁心的磁饱和;
(2) 不计电机中的涡流和磁滞损耗;
(3) 电机中的电流为对称三相正弦波电流。
选用同步旋转坐标系d-q下的数学模型[12],其定子电压方程可以表示为

(1)
定子磁链方程为
(2)
电磁转矩方程为

(3)
电机的机械运动方程为

(4)
式中:ud、uq为定子电压的d、q轴分量;id、iq为定子电流d、q轴分量;R为定子的电阻;p为极对数;ψd、ψq为定子磁链的d、q轴分量;ωr为电角速度;Ld、Lq为d、q轴电感分量;ψf为永磁体磁链;ωm为电机的机械角速度;J为转动惯量;B为阻尼系数;TL为负载转矩。
2 改进型DB-DTC系统设计
2.1 DB-DTC
DB-DTC将无差拍控制思想与直接转矩控制系统结合,在一个控制周期内使实际观测的转矩和磁链能够跟踪上期望值。
DB-DTC系统外环为PI控制器,内环为DB-DTC器。在图1所示的控制框图中,给定参考速度与实际转速的差值送入PI控制器得到参考转矩,将参考转矩与实际观测出的转矩信号的差值、给定磁链与实际观测磁链的差值,一起送入DB-DTC模块,计算出同时满足消除转矩和磁链误差的参考电压,经Park逆变器和空间矢量脉宽调制(SVPWM)模块调制后驱动电机运行[13]。
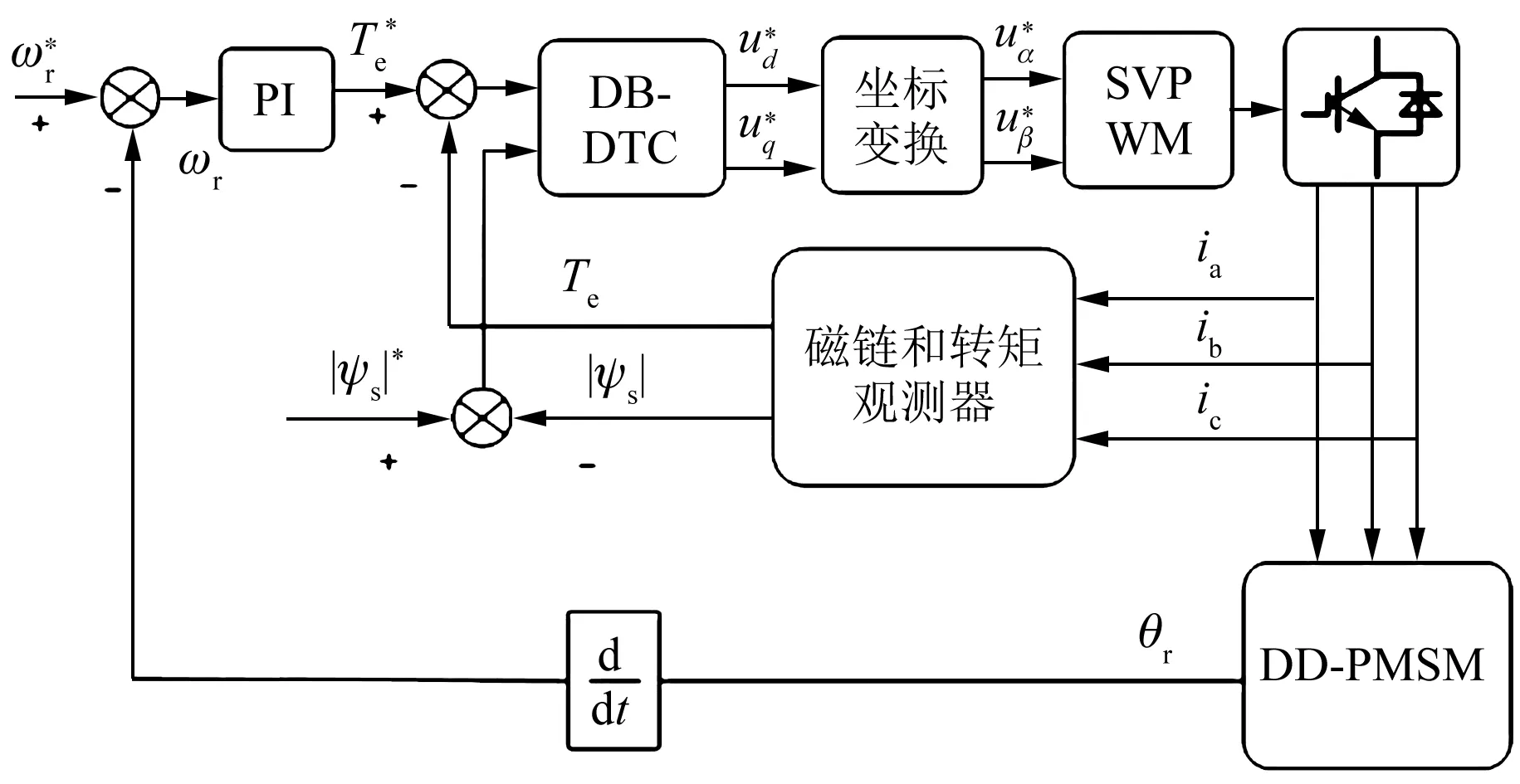
图1 DB-DTC控制框图
传统DB-DTC的公式推导如下。将式(2)代入式(1)中,消除电流量,化简整理得到d、q轴磁链的离散化公式:
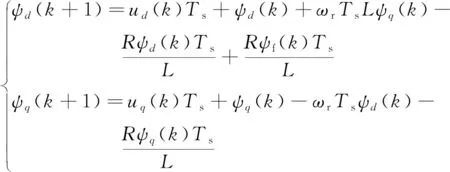
(5)
式中:ψd(k)、ψq(k)分别为当前时刻定子磁链在d、q轴的分量;ψd(k+1)、ψq(k+1)分别为下一时刻定子磁链在d、q轴的分量;ud(k)、uq(k)分别为当前时刻d、q轴电压;ψf(k)为k时刻永磁体磁链;Ts为一个控制周期;L=Ld=Lq。
将式(2)代入式(3)中,得到定子磁链与转矩的关系:

(6)
对电磁转矩求导并进行离散化处理:

(7)
式中:Te(k+1)、Te(k)分别为下一时刻和当前时刻电磁转矩。
将式(5)代入式(7)中,化简整理得到q轴上定子参考电压:
(8)

对k+1时刻定子磁链幅值进行离散化处理:
ψs(k+1)2=ψd(k+1)2+ψq(k+1)2
(9)
为达到无差拍控制的效果,令ψs(k+1)=ψs(k)*,化简得到d轴上定子参考电压[15]:
(10)
2.2 改进型DB-DTC
传统DB-DTC电机运行的过程中需要在旋转坐标系中计算定子参考电压,在此坐标系下,电磁转矩和定子磁通幅值均不解耦。同时在定子参考电压的计算中,需要反复求解一元二次方程,实时计算量大,对控制系统的硬件要求比较高[16]。


图2 改进型DB-DTC坐标系定义
改进型DB-DTC公式推导如下,对定子磁通进一步推导,得到定子磁链幅值在旋转坐标d-q轴分量:
(11)
根据式(2)、式(11),可以推导出旋转坐标系下的定子电流与定子磁链幅值之间的关系:
(12)
将式(11)和式(12)代入式(3),得到电磁转矩与负载角的表达式:

(13)
当定子磁链幅值恒定时,电机的电磁转矩仅与负载角有关。对式(13)中电磁转矩求导,得到电磁转矩变化率与负载角变化率的关系表达式:

(14)
利用前向欧拉离散化对式(14)进行离散,并将转矩期望值赋值给下一时刻,得到期望转矩与负载角的表达式:

(15)
根据式(15)可进一步求出期望负载角:

(16)
由期望负载角计算出定子磁链在α、β轴上的增量Δψα、Δψβ:

(17)
由增量Δψα、Δψβ求得定子参考电压:
(18)
将式(18)中定子参考电压在静止坐标轴上的分量输入SVPWM模块控制电机运行。改进型DB-DTC整体流程框图如图3所示。
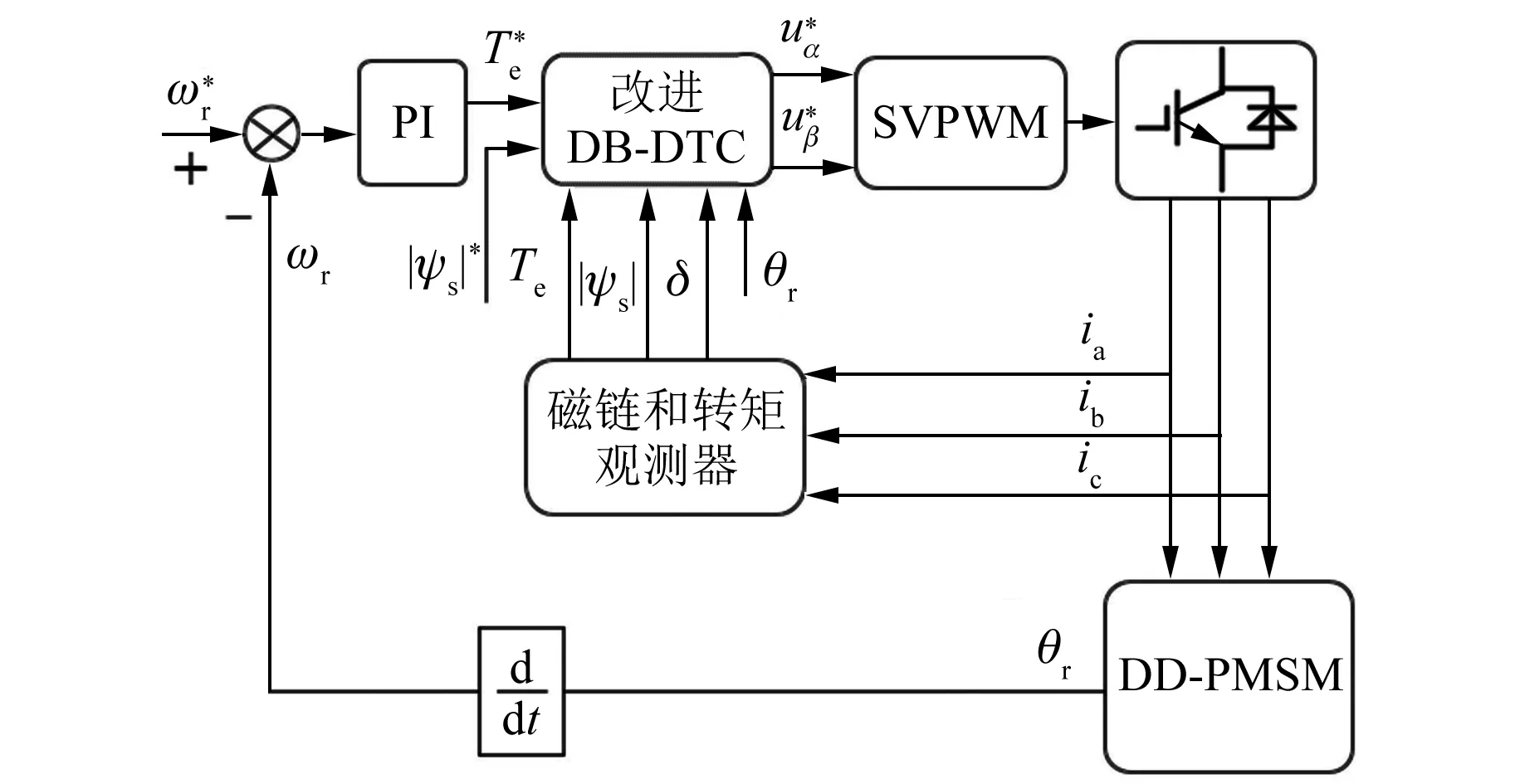
图3 改进型DB-DTC控制框图
3 位置型阻抗控制
将改进型DB-DTC结合位置型阻抗控制验证所提控制策略的控制性能。位置型阻抗控制的关键是建立位置和力之间的二阶阻抗模型关系,以达到柔顺控制的目的。位置和力之间的动态关系是阻抗控制的核心思想。由阻抗控制原理可得到阻抗系统的动态方程:

(19)
式中:m、b、k分别为物块质量、系统阻尼和弹性;f为系统施加外力;x为末端偏移量。当m、b、k参数确定时,即可得到期望动态响应[17]。
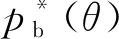
图4 位置型阻抗控制
4 仿真分析
4.1 仿真模型搭建
通过在MATLAB/Simulink环境下搭建三闭环电机控制系统仿真模型,将传统DB-DTC和改进型DB-DTC的控制效果进行对比,并且结合位置型阻抗控制策略验证改进型DB-DTC的动态响应性能。图5中仿真模型由Simulink仿真结合s函数构成。传统DB-DTC和改进型DB-DTC采用MATLAB的s函数编程实现[18]。采用DD-PMSM作为被控对象,电机的相关参数和仿真条件如表1和表2所示,其中fpwm为一个周期内信号从高电平到低电平再回到高电平的次数。
图5 基于改进型DB-DTC的DD-PMSM仿真模型
表1 DD-PMSM参数

表2 仿真参数
4.2 仿真结果分析
在给定0.5 N额定负载,位置20°的情况下进行传统DB-DTC与改进DB-DTC下电机位置响应对比仿真,得到的位置响应波形如图6所示,同等仿真情况下的速度响应波形如图7所示。在给定0.5 N额定负载,转速40 r/min的情况下进行传统DB-DTC与改进DB-DTC下电机转速对比仿真,得到的电机速度波形如图8所示,同等仿真情况下的q轴电流波形如图9所示。图10为给定0.5 N额定负载,转速40 r/min的情况下,改进型DB-DTC及其结合位置型阻抗控制策略的位置响应波形图。
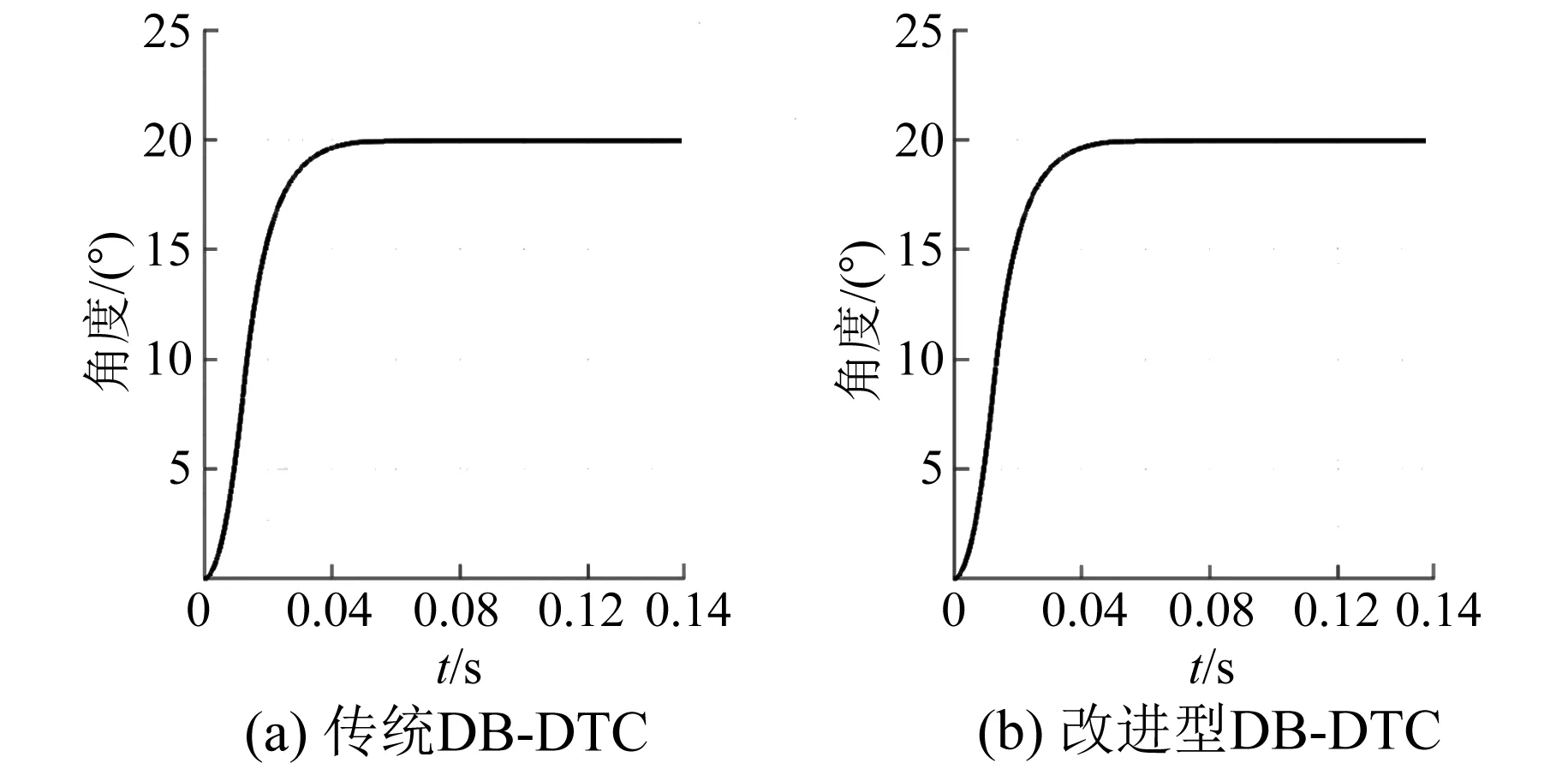
图6 传统DB-DTC与改进型DB-DTC位置响应波形图
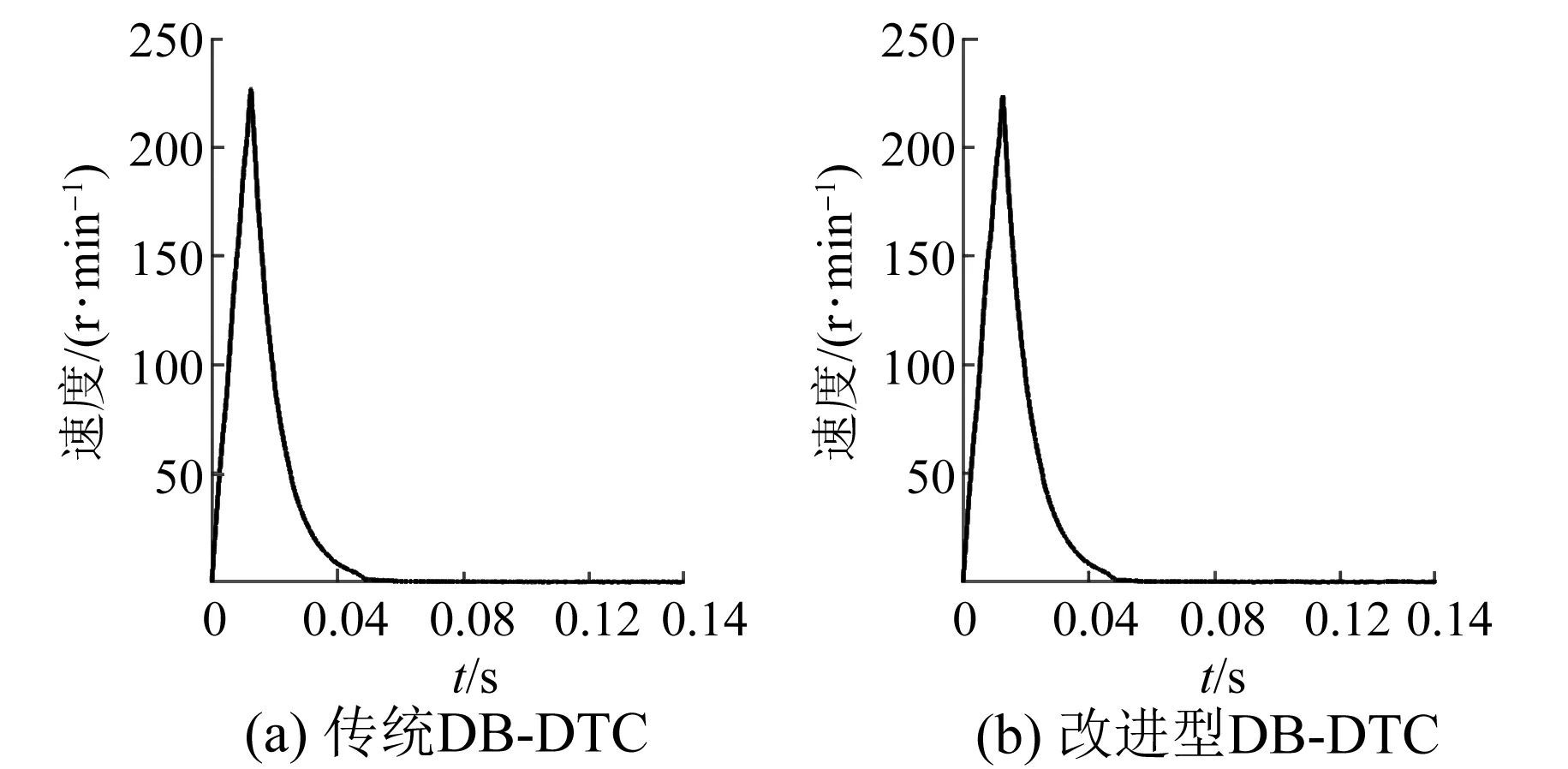
图7 传统DB-DTC与改进型DB-DTC速度响应波形图
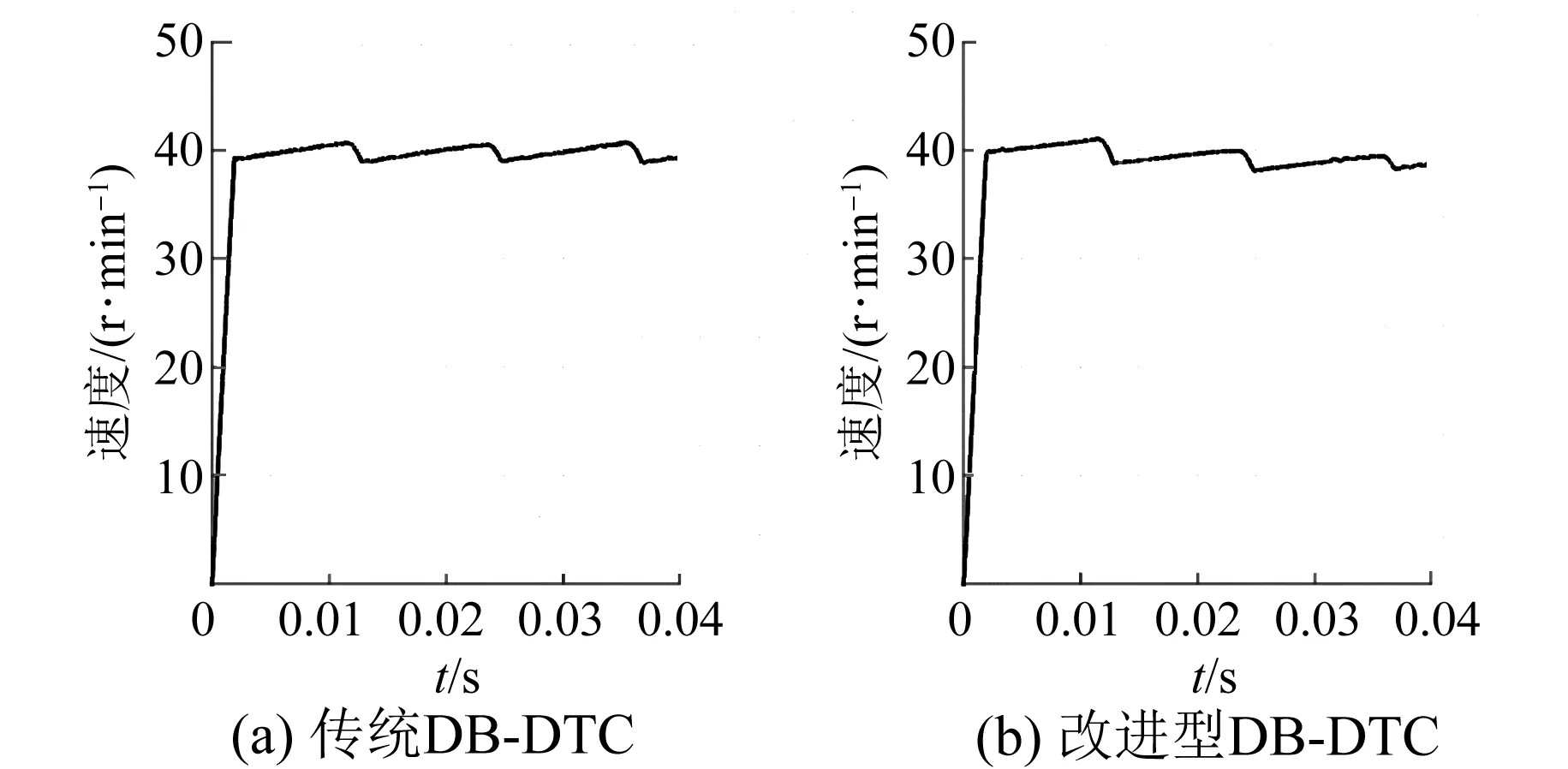
图8 传统DB-DTC与改进型DB-DTC转速波形图

图9 传统DB-DTC与改进型DB-DTC的q轴电流波形图
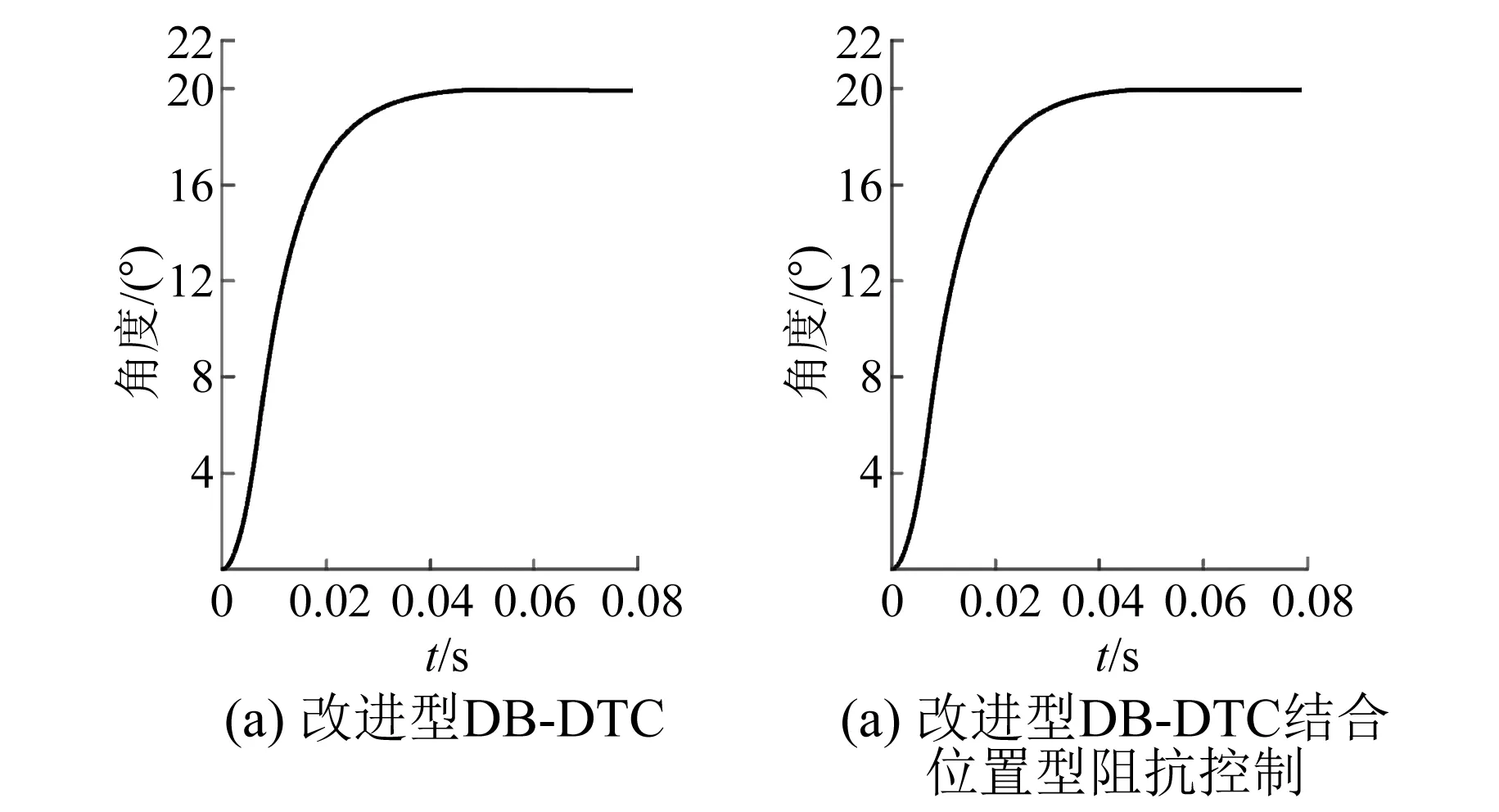
图10 改进型DB-DTC与位置型阻抗控制策略的位置响应波形图
对图6的仿真结果对比分析可得,电机由0°转动到20°时,传统DB-DTC下电机转动至给定角度所需时间大约为0.049 s,稳态运行角度误差为0.12°。改进型DB-DTC下电机转动至给定角度所需时间大约为0.047 s, 稳态运行角度误差为0.10°。在图7中,传统DB-DTC下电机转动至给定角度时电机转速降为零所需时间大约为0.049 s,改进型DB-DTC下电机转动至给定角度时电机转速降为零所需时间大约为0.047 s。在位置控制模式下,相对于传统DB-DTC,改进型DB-DTC下电机转动至给定角度时转速降为零所需时间减少0.002 s,稳态运行角度误差减少0.02°。
图8仿真结果表明,传统DB-DTC下电机速度上升至给定速度所需时间大约为0.006 s,稳态转速误差为0.59 r/min,稳态转速波动为1.18 r/min。改进型DB-DTC下电机速度上升至给定速度所需时间大约为0.002 s,稳态转速误差为0.56 r/min,稳态转速波动为1.12 r/min。在速度控制模式下,相对于传统DB-DTC,改进型DB-DTC下电机达到给定转速的时间减少0.004 s,稳态转速误差降低0.03 r/min,稳态转速波动降低0.06 r/min。图9中,传统DB-DTC下电机稳态运行时q轴电流峰值为1.227 A,q轴的电流脉动为1.707 A。改进型DB-DTC下电机稳态运行时q轴电流峰值为1.034 A,q轴的电流脉动为1.503 A。在速度控制模式下,改进型DB-DTC电机进入稳态运行以后,q轴电流峰值降低0.193 A,q轴电流脉动降低0.204 A。图10中,改进型DB-DTC结合位置型阻抗控制策略位置响应对比改进型DB-DTC单独控制,电机转动相同角度所需的时间相差不大。
根据上述分析可以得出所提改进型DB-DTC在减少计算量的情况下达到了与传统DB-DTC一样的控制效果,简化了控制过程,电机控制系统具有更好的动态性能和更强的抗干扰能力。并且所提控制策略结合其他控制策略时电机的动态响应时间基本不变,进一步证明所提控制策略的优越性。
5 结 语
为提升DD-PMSM控制性能,本文提出一种改进型DB-DTC策略,在保留传统DB-DTC动态响应特性的基础上,简化了控制流程,减少了控制策略的实时计算量,降低了电机运行时的转矩波动。文中提出的改进型DB-DTC在静止坐标系中建立数学模型,直接计算出参考定子电压,避免了传统DB-DTC在定子参考电压的计算中需要进行多次坐标变换以及反复求解一元二次方程的弊端。仿真结果表明,在位置控制模式和速度控制模式下,改进型DB-DTC策略的电机响应时间减少,转速误差和转速波动降低。在电机进入稳态运行以后,q轴电流峰值降低,电流脉动得到抑制。并且所提控制策略可以结合其他控制策略而不影响电机的动态响应性能,为实现DD-PMSM位置的高精度控制提供了有效的方法。
