压力感知室内定位算法研究
2022-08-30贾崇伟姜文淇李中伟苏长河佟为明
贾崇伟,姜文淇,李中伟,苏长河,佟为明
(1.哈尔滨工业大学 电气工程及自动化学院,黑龙江 哈尔滨 150001;2.哈尔滨工业大学 空间环境与物质科学研究院,黑龙江 哈尔滨 150001)
0 引 言
室内定位是智能家居系统的主要功能之一,可以帮助居民实时记录住宅内状况,为物体移动、记录等工作提供便利[1]。随着室外宽阔环境定位技术的成熟与人们对复杂环境下室内定位精度需求不断提升,室内定位技术日益受到人们重视。
室内定位的测量参数主要包括传播时间或时间差、运动方向与加速度、运动角度或角度差、信号强度等。文献[2~4]研究了采用超宽带、激光雷达、WiFi技术等信息传输与融合技术的定位方法;文献[5,6] 提出了融合深度学习与图像处理的计算机视觉定位的室内定位方案。基于信号传输或指纹库的定位方法,普遍存在环境干扰适应性差、定位精度低、定位训练复杂等缺点[7~10]。基于压力感知的室内定位技术出现于20世纪90年代末,1997年Addlesee M等人设计的ORL Active Floor使用3×3区域的低碳钢板作为模拟地板[11]。Venkatraman S在通信节点上添加压力传感器,并获得参考高度与参考压力,进而计算出受力点的空间位置[12]。Mai L等人在桌面上搭建了一个小型感压定位系统[13],在50 kg的测量范围内可以对静态物体进行厘米(cm)级定位。但该系统需在各个物体表面大量布置传感器,难以大范围使用。
综上所述,目前的基于压力感知的定位方法为提高定位精度,主要采用增加传感器数量的方法,这又导致传感器的测量参数、接触面积有较高的限制条件,同时多传感器测量过程中的协调问题也是定位的难点所在。本文拟提出并实现独立区域压力感知定位算法,分析传感器布局对定位精度的影响,在较低的传感器布置密度条件下实现较高的定位精度。对于目标跨区域运动的情况,提出由多个定位区域协同定位方案以实现室内整体定位。
1 压力定位基本原理
本文对压力定位的基本原理与算法实现流程进行分析。当物体受到外力F作用时,物体不同位置所受力F的分力大小不同,主要影响因素包括力F的大小和施力点距离,建筑中常见的地板形状为正方形平板。在二维平面上定位目标的具体位置需要确定目标P的横坐标xP与纵坐标yP。在正方形平板下布置n只压力传感器,若P对平面的压力为FP,则P位置为
(1)
式中xi、yi为压力传感器Si的横纵坐标,Fi为测量得到的压力值。可以得出结论,确定称重传感器的具体位置与称重值,即可求出平面受力点坐标。
为定位地板区域内物体的具体位置,在正方形平面区域内布置n个压力传感器,当物体在区域表面静止放置或运动时,由式(1)可以计算出物体在该区域内的相对位置,此时需要保证区域内传感器数目不少于3个,即n≥3。传感器最小数量布置方法见图1,受力点P1的坐标为

图1 定位区域布置3只传感器的定位原理
(2)
图1中,Sa、Sb、Sc包围形成的区域可以对P1进行有效定位,定义该区域为定位区域A的有效定位区域Ae;在Ae外的区域中,基于压力数据计算得出的P2位置坐标与平面区域的边长a相关。不仅如此,质量较大的定位目标静置或运动到Ae区域外时,传感器因无法支撑定位平面而出现平面倾斜的现象,定位的误差增加,因此定义该区域为定位区域A的无效定位区域Ad。为提高传感器采集数据利用率,Ad应具备以下2个条件:1)Ad的面积远小于Ae;2)Ad中心对称,在A边缘平均分布。
定位目标接触平面后,平面边缘产生的形变较中心区域明显,Ad的存在可以减小定位的误差,因此,在设计定位区域时应当考虑Ad的范围。
2 基于感压地板压力感知的室内定位算法
2.1 独立区域压力感知定位算法
为实现独立区域压力感知定位,同时增加有效定位区域范围,传感器布置数目应不少于3只,且尽可能摆放在平面边缘区域。考虑到定位地板的平衡性与后续多区域定位功能实现,本文设计的独立区域压力感知定位布局将4只压力传感器布置在定位区域A的角落,其结构如图2所示。

图2 独立区域压力感知定位布局
设定位区域的边长为a,根据式(1),可计算出定位目标所在定位区域的相对位置
(3)
式(3)是定位区域内无预置压力条件的理想结果。实际测量中,存在两个影响定位结果的因素:1)传感器未调零;2)定位区域存在预置物体。考虑上述因素的影响,在预置物体P′的影响下,在独立区域A内物体P的相对位置为
(4)
式中F′i为预置物体P′对传感器Si的分压;Fipre为传感器Si的零置数值。
由于定位区域A的边缘部分定位误差较大,且物体移动过程中边缘区域的存在跨区定位的问题,因此在A内设置无效定位区域Ad用于降低整体定位误差。相对地,有效定位区域Ae位于平面的中央区域。Ad具有避免单一定位目标出现多定位结果的作用,在后文将进行详细介绍。
当某一独立区域A的传感器检测到压力数值变化时,本文提出的独立区域压力感知定位(IRPP)算法。实现过程见算法1:
算法1 独立区域压力感知定位算法
输出:相对位置坐标P(i)或无输出

2)While定位系统运行:
4) ifs(i)-s(0)≥s:

6) ifx(i)∈Xandy(i)∈Ythen:
7)P(i)=(x(i),y(i));
8) else:end if
9) else:
10) forjin range(1,4):
12)end for
13) end if
14)i=i+1。
在实验验证时,传感器在静置状态下压力测量结果存在波动现象,且在较长时间范围内存在持续上升或下降的趋势,因此在定位过程中需要实时调整预设值,对采集的压力数据进行均值降噪处理。
2.2 多区域协同定位方案设计
实际情况中,由于单一定位区域面积有限,且房屋总体定位环境的形状并不是标准的正方形或矩形平面,因此实现室内整体定位需要由多个定位区域协同定位。对于室内定位目标P,如确定物体所在定位区域Ai及定位区域内相对位置(xP,yP),则P的实际位置为(xP,yP,Ai)。
图3为两相邻定位区域A1和A2对P的不同定位结果,按照定位目标接触面积大小可分为两类情况:

图3 A1,A2对P的不同定位结果P′,P″
1)接触面积较小
当P近似模拟为质点时,假设传感器无需调零且无预置物体,根据式(4)可以得到P的坐标P′(xP′,yP′,A1)。然而,由于定位区域A1和A2均需要使用传感器S2和S4定位,即便P位于A1区域内,A2仍可得出P的位置P″
(5)
显然,同一定位目标在定位过程中不允许同时得出多个不同的坐标。实际上,相邻定位区域所得出的错误定位位置P″除与物体P在定位区域A1的相对位置有关,也与相邻定位区域的位置相关,A1与A2的位置关系与P″的对应关系见表1。
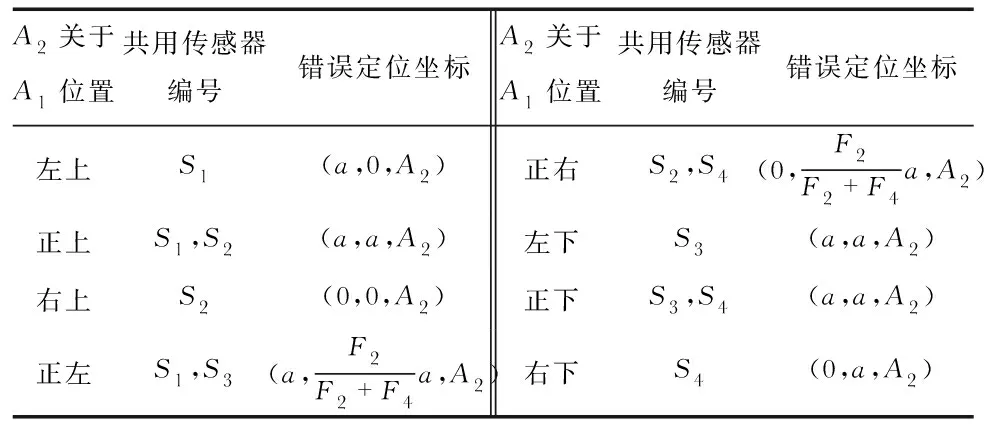
表1 错误定位坐标与定位区域相对位置关系
2)接触面积较大
室内的人员运动时,不可避免地存在跨区域的情况,由于接触面积此时不可忽略,在相邻定位区域内会同时计算得出较为相近的坐标值,这些坐标值会影响定位系统的稳定性,可能造成单目标被误判为多目标情况,同时也浪费定位数据资源。
由上述两类情况得知,在设计定位区域时应当尽量避免对单目标同时输出多个定位坐标的情况,否则对该定位目标后续的定位将造成极大干扰。为解决定位目标跨区域定位的问题,应在定位区域边缘区域设定无效定位区Ad,并要求计算得出的目标定位位置落于Ad内时将被视为无效定位。
为确保Ad在定位平面内分布均匀,同时在极大降低跨区定位发生可能的前提下减少对有效定位区域Ae的影响,Ad可以按照图2的区域设置,在面积为a2的定位区域A四周宽度为ε的无效定位区域,其面积为4ε(a-ε),ε的数值主要由定位区域材料等因素决定。当定位目标位于定位区域的无效定位区域时,定位区域计算得出的位置将被丢弃,并保留定位目标上一次有效的位置,直至定位目标离开Ad进入该区域或相邻区域的Ae中。
3 基于压力感知的室内定位系统
本文搭建基于压力感知的室内定位系统,其整体结构如图4所示,对于单一的定位地板单元,测量模块包括位于定位平面四角的压力传感器,收集到的区域内压力模拟信号经由转换模块转换为数字信号传递至计算模块。计算模块基于本文提出的压力感知定位算法计算目标当前位置并判断位置是否满足发送要求,射频模块对坐标数据进行调制并发送至上位机进行定位目标位置显示。当该定位区域的射频接收部分收到其他区域发送的定位坐标或定位信息时,计算模块调整内部参数,以便进行后续定位。
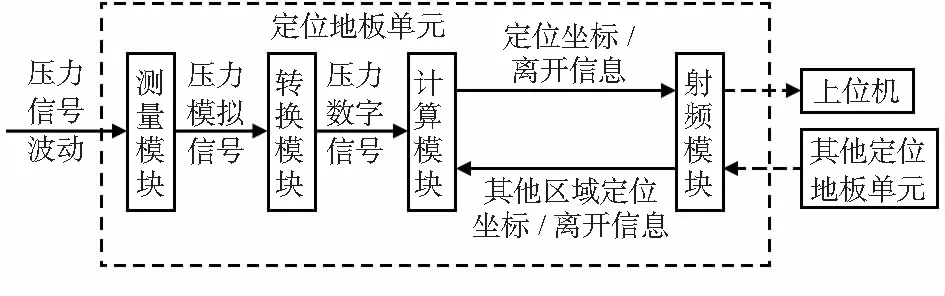
图4 室内定位系统功能框图
本文设计的定位地板单元如图5所示,为确保搭建的定位地板单元与实际应用环境相近,使用两块边长38 cm、厚度3 mm的亚克力板作为相邻的定位区域平面,由式(3)可知,定位地板单元定位精度与传感器测量参数相关。由于传感器有效定位区域留有一定空间,当系统需要扩展时只需将扩展定位平面放置在传感器有效定位区域即可。实验前将定位区域分割为面积为4 cm2的单元,并划分厚度为6 cm的无效定位区域。
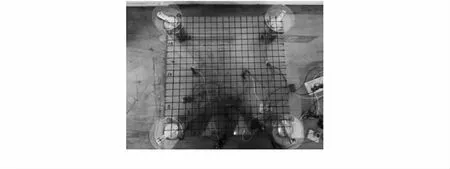
图5 定位地板单元实物
4 实验验证
前文论述的独立区域压力感知定位算法和多目标压力定位算法,在具体实现时应当配合使用。使用搭建完成的定位地板单元对定位目标进行定位,对定位算法的定位精度进行分析。
4.1 传感器布局对定位精度的影响
分别在传感器内置和外置两种布局环境下将定位目标放置在定位地板单元的不同区域。定义测量误差η为实际位置与测量位置间的距离,测量误差在给定范围内的测试次数与总测试次数之比为定位正确率。规定η≤2内的实验结果为正确定位结果,得到的结果如图6所示,外角布局方案使用的传感器数目更少,且在单区域内误差分布较为平稳。

图6 两类传感器布局方式的误差对比
表2为传感器外角与内角布局方案的定位误差分析,外角布局方式的精度与定位准确率相较内角布局方式更高。

表2 外角与内角传感器布局方案定位误差分析
出现该现象的原因是,内角布局方案中传感器定位区域与定位平面的接触面较大,导致定位平面的有效定位区Ae面积减小,位于无效定位区的目标定位误差有所增加。外角布局相比内角布局,在增大定位区域范围的情况下,定位最大误差减小0.9 cm,定位精度提高25.1 %,定位准确性整体提高26.3 %。
4.2 定位地板单元不同定位区域误差分析
为验证定位区域内不同位置定位精度的差异性,选择外角布局方案,设厚度ε=6 cm。将定位平面中心区域作为有效定位区域,平面边缘区域与角落区域作为无效定位区域,其误差对比如表3所示,中央区域的定位精度远高于边缘区域与角落区域,且物体位置与平面和传感器接触边缘距离越近,定位误差越大,即Ad的定位精度低于Ae,也验证了外角布局方案的正确性与可靠性。因此,搭建室内定位系统并确定定位区域时,传感器与定位平面的接触面积不应过大,否则边缘区域与角落区域面积增加,有效定位区域减小。

表3 独立定位区域内不同位置的误差对比
由上述实验结果可知,独立区域压力感知定位算法可以计算定位目标在单个定位区域上的相对位置信息,其定位误差与定位目标所在位置相关。
5 结束语
本文研究了压力感知定位基本原理,比较了不同传感器布局方案,根据感压平面受力模型,提出了独立区域压力感知定位算法,设计了多区域协同定位方案,实现了室内物体定位;搭建了基于压力感知的室内定位系统,并进行实验验证了定位算法的定位精度。实验结果表明,独立区域压力感知定位算法的定位精度在1 cm范围内,验证了本文所提基于压力感知的室内定位算法的正确性和有效性。