Flow control characteristics of the digital and mechanical redundancy control electric modulation valve
2022-08-30HeLIUBinZHAOBoWANGLongQUANYunxiaoHAOYunweiLI
He LIU ,Bin ZHAO ,Bo WANG ,Long QUAN✉ ,Yun-xiao HAO ,Yun-weiLI,2
1Key Laboratory of Advanced Transducers and Intelligent Control System of Ministry of Education and Shanxi Province,Taiyuan University of Technology,Taiyuan 030024,China
2Department of Electrical and Computer Engineering,University of Alberta,Edmonton ABT6G1H9,Canada
Abstract: The electrical modulation valve can provide proportional output valve element displacement,flow,or pressure according to a continuously changing input electrical signal.It is the core component of electro-hydraulic proportional control technology.To remove the influence of pressure difference changes on the output flow,the traditional scheme is to use a pressure compensation valve,which increases the difficulty of both manufacturing and maintaining the valve.To solve this problem,a method of digital and mechanical redundancy control flow is proposed.Pressure sensors are installed at the inlet and outlet of the valve,and the controller adjusts the displacement of the valve element according to the pressure difference between the valve ports to realize high-precision control of the flow.A pressure compensation valve is installed in front of the valve,and a three-way solenoid valve is used to control the working of the compensation valve.In the case of sensor failure,the valve is switched to the mechanical compensation differential pressure mode,to control the flow and to achieve redundancy control.The system security is thereby improved.The feasibility of this scheme is verified through simulation and tests.The results show that,both for digital compensation and mechanical compensation,the output flow can be kept constant when the pressure difference changes,and the system has good static and dynamic characteristics.The principle can be applied to the displacement-flow feedback type electrical modulation valve,and can realize accurate control of the flow of the pilot valve and,finally,accurate control of the flow in the main valve.
Key words: Electrical modulation valve;Control characteristics;Co-simulation;Redundancy control
1 Introduction
An electrical modulation valve can provide proportional output displacement,flow,or pressure,according to a continuously changing input electrical signal.It is the core component of electro-hydraulic proportional control technology and is widely used in aviation,aerospace,marine engineering,metallurgy,mining,heavy machinery,and other fields (Tamburrano et al.,2019;Tong et al.,2020;Xu et al.,2020;Zhang et al.,2020).
For a long time,due to the gap in core components,China’s equipment manufacturing industry lagged behind developed countries in terms of overall technology.In many important applications and for major equipment required by the country,highperformance electrical modulation valves still mainly rely on imports and are restricted by foreign companies in many aspects such as technology,price,and the supply cycle.With the development of science and technology,under the strategic background of“Industry 4.0” in Germany (Ding and Li,2014),“Industrial Internet”in the USA(Yang,2015),and“Industry 2050” in the UK (Zhong,2018),developed countries have successively launched higher performance and more intelligent products.For example,the 4WR series electrical modulation valves from Rexroth of Germany have the functions of programming,parameter configuration,nonlinear adaptive compensation control,and advanced data bus communication.The CMA electronic load sensing multi-way valve from Eaton(2021) of the USA converts the complex hydraulic mechanical system into a flexible and intelligent electrical control system to realize efficient and independent load control.Its energy-saving effect is remarkable.The discrete hydraulic digital valve prototype developed by Tampere University of Technology in Finland can realize functional logic programming,and the valve is applied to construction machinery to improve system efficiency (Ketonen and Linjama,2019).Therefore,the development of a low-cost,highperformance,and high-reliability electrical modulation valve is of great significance for enhancing the international competitiveness of China’s electro-hydraulic proportional control technology and for promoting the technological progress of China’s hydraulic industry and related host industries.
Flow control is one of the most important functions of the electrical modulation valve.Many scholars have carried out research on flow control in valves.Due to the slow dynamic response and large space occupation of flowmeters,an indirect flow measurement method is widely used.Xu et al.(2017) proposed a novel flow rate inferential measurement method and successfully applied it to hydraulic elevators.Zhang et al.(2019) proposed a computational flow feedback control method in which an AdaBoost neural networkis employed to monitor flow change regulation affected by spool displacement,pressure difference,and temperature with high accuracy and low overfitting.The control error is controlled within±3%.
In a large flow hydraulic system,the pilotcontrolled electrical modulation valve is usually used to control the flow.In principle,the pilot-controlled electrical modulation valves include:the displacement following type,the displacement-force feedback type,the pressure difference feedback type,the displacementelectric feedback type,and the displacement-flow feedback type.The structural principle of the displacementflow feedback type was proposed by Andersson,a Swedish scholar,and was called the valvistor valve.The displacement of the main valve element and the flow of the main valve are respectively proportional to the displacement of the pilot valve element and the flow of the pilot valve.It has the advantages of simple structure,strong flow capacity,and low cost.Eriksson et al.(2007a,2007b,2008) verified the correctness of the dynamic mathematical model of the valvistor valve,and further set two check valves and two pilot oil circuits in the valve element to achieve a two-way flow in the valve.Prasetiawan et al.(2001)and Zhang et al.(2002) studied the dynamic characteristics of the valvistor valve and,using the root locus method,analyzed the bandwidth limitation of the closed-loop system caused by the zero position of the open-loop transfer function.Fales (2006) studied theinfluence of the main valve structure parameters on its rapidity and stability by using the root locus method and the Bode diagram method.Quan et al.(2010)applied the flow amplification principle to the proportional directional valve,and the prototype test showed that the valve had high control accuracy and good static and dynamic characteristics (Wang et al.,2013,2014).Eriksson (2007) proposed the principle of the two-way valvistor proportional flow valve controlled by double pilot valves based on differential pressure compensation and applied the valve to an electrohydraulic system with independent control of inlet and outlet to reduce system energy consumption.Wang et al.(2018,2020,2021)adopted a fuzzy proportional-integral-derivative(PID)controller to control the flowin a closed loop,with feedback obtained by the flow inference with back-propagation neural network(BPNN)based on the spool displacement in the pilot stage and the pressure difference across the main orifice.The results show that this control strategy is very effective and the performance of the valve is improved.Huang et al.(2019)adopted a kind of digital flow compensator with a bilinear interpolation algorithm presented to compensate for the pressure drop,in which the pressure drop and the desired outlet flow are the twoinput parameters.The experimental results show that such a control strategy can improve the performance of the valve.Zhao et al.(2021) proposed a novel twoposition three-way electro-hydraulic proportional directional flow valve which can realize manual pilot control and electro-hydraulic proportional flow control.It has been successfully applied to hydraulic roof supports.
In the pilot controlled electrical modulation valve based on the displacement-flow feedback principle,the pilot valve is a proportional flow valve,and the main valve amplifies the flow of the pilot valve.If there is error in the output flow of the pilot valve,the error of the output flow of the main valve will be multiplied,so it is necessary to accurately control the flow of the pilot valve.At present,the method for controlling the output flow is to use the displacement sensor closed loop to control the opening of the valve port,and add a mechanical pressure compensation valve in front of or behind the valve.The pressure difference between the inlet and outlet of the control valve is not affected by the load,and maintains a fixed value,so that the flow through the valve and the valve opening have a linear relationship.However,this scheme increases the manufacturing difficulty and maintenance complexity of the valve,and will cause additional throttling loss (Cheng,2005;Wu et al.,2007).Moreover,once the mechanical pressure compensation valve is designed,the pressure difference after compensation is a fixed value.If you want to change this value,you need to replace another parameter of the pressure compensation valve,which introduces low flexibility and low economy.
Addressing this problem,and taking an electrical modulation valve with orifice diameter of 6 mm as the research object,a method of digital and mechani-cal redundancy control flow is proposed.The displacement of the valve element is adjusted in real time by collecting the pressure sensor signal for flow calculation,and a pressure compensation valve and a threeway solenoid valve are added to the system.In case of sensor failure,it is switched to the mechanical compensation differential pressure mode,so as to control the flow and realize the purpose of redundancy control,and thus the system security is improved.The feasibility of this scheme is verified through simulation and test research.The results show that whether by digital compensation or mechanical compensation,the output flow can be kept constant when the pressure difference changes,and the system has good static and dynamic characteristics.
2 Working principle
The principle of digital and mechanical redundancy control of the flow of an electric modulation valve is shown in Fig.1.The pressure sensors are installed at the inlet and outlet of the valve,and the controller adjusts the displacement of the valve element according to the pressure difference of the valve ports,to realize high-precision control of the flow.A pressure compensation valve is installed in front of the valve,and a three-way solenoid valve is used to control whether the compensation valve is involved in work.When there is no fault in the system,the three-way solenoid valve loses power,so the pressure compensation valve is in the fully open position,and the flow is digitally controlled by the controller.When the sensor fails,the three-way solenoid valve is powered on andis switched to the mechanical compensation differential pressure mode to control the flow and to achieve redundancy control.
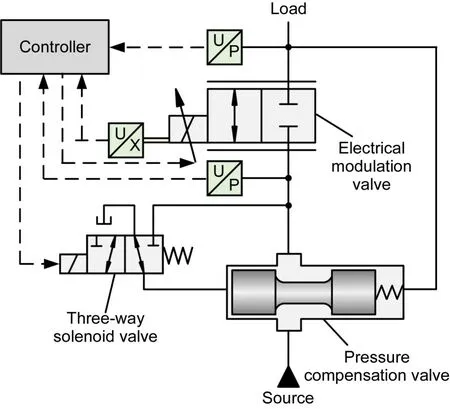
Fig.1 Principle of digital and mechanical redundancy control of the flow of an electric modulation valve
When the proportional electromagnet of the electrical modulation valve is electrified,the valve element will produce displacement under the action of the electromagnetic thrust and spring force.Therefore,the proportional control of valve element displacement can be realized by controlling the input electric signal.However,the flow through the valve is related to factors such as valve element displacement and valve port differential pressure.The formula is as follows:

q
is the flow through the valve port,C
is the flow coefficient,W
is the area gradient,x
is the valve element displacement,Δp
is the pressure difference between the inlet and outlet of the valve,andρ
is the oil density.According to Eq.(1),if the area gradient is linear,the flow is proportional to the displacement and to the square root of the pressure difference.When the pressure difference is known,the flow through the valve can be controlled by controlling the valve element displacement.However,in actual use,the pressure difference is often changing and so,in the case of constant valve element displacement,the change of load pressure will lead to a change of output flow,resulting in the actual speed of the actuator not matching the demand.
When the differential pressure changes,the formula is as follows:

q
is the changed flow,and Δp
is the changed pressure difference.If the mechanical pressure compensation valve is used,the pressure difference at the valve port can be adjusted from Δp
to Δp
,so that the flow through the valve is stillq
.If the digital compensation flow scheme proposed in this paper is adopted,the flow through the valve can still beq
by adjusting the valve element displacement.The flow formula is as follows:
x
is the adjusted valve element displacement.The relationship betweenx
andx
can be calculated by combining Eqs.(1)and(3),as follows:
As can be seen from Eq.(4),as long as the pressure difference between the inlet and outlet of the valve is measured by the pressure sensor and the new spool displacement instruction signal is calculated,the output flow can be kept constant when the pressure difference of the valve port changes.The designed flow control principle of an electrical modulation valveis shown in Fig.2.

Fig.2 Flow control principle of an electrical modulation valve
The control loop is composed of a valve element displacement closed loop and a digital compensation flow closed loop.In the valve element displacement closed loop,the command signal,composed of the valve element displacement feed-forward signal and the PID feedback signal,is used to control the valve element displacement,to realize high response and high precision control of the valve element displacement of the electrical modulation valve.In the closed loop of digital compensation flow,two pressure sensors are used to collect the pressure at the inlet (p
)and outlet(p
)of the valve respectively,and the actual pressure difference Δp
is obtained by subtraction.Dividing Δp
by Δp
and opening the root sign (the SQRT module in Fig.2) to get the displacement correction coefficient,and multiplying that coefficient with the set displacement signal to output the adjusted displacement signal realize the displacement correction,so as to ensure a constant output flow.It should be noted that when Δp
is 0,it cannot be used as denominator.At this time,the output value can be “1”by using the judgment module.This new scheme of digital compensation flow has the following three obvious advantages:
(1)The pressure compensation valve can only keep the pressure difference constant by reducing the opening of the valve port when the pressure difference increases.When the pressure difference decreases,it cannot be compensated for.However,the new scheme can compensate the flow when the pressure difference increases or decreases.It can control the flow by reducing or increasing the opening of the valve port,which gives a wider range of flow control.
(2) When using digital control flow,the failure of a pressure sensor or electrical circuit will lead to an out-of-control flow.Such a system has risks.After adding a pressure compensation valve and a threeway solenoid valve,it can be switched to mechanical control flow in case of failure of the digital control part,so achieving redundancy control and improving the safety of the system.
(3) When the scheme is used in the multiactuator system,the three-way solenoid valve can actively control the full opening of the pressure compensation valve of the highest load circuit and thus reduce the system pressure loss and improve the energy saving.
3 Simulation research
As the flow control of the pressure compensation valve is a mature technology,only the simulation model of digital control flow is established for verifi-cation in the simulation stage.The co-simulation model of the electrical modulation valve is established in the multidisciplinary co-simulation software Simulation X.The simulation model of an electrical modulation valve is shown in Fig.3.The co-simulation modelincludes: (1) hydraulic power unit;(2) proportional valve;(3) relief valve;(4) proportional solenoid;(5)displacement sensor;(6)pressure sensor;(7)valve element displacement closed loop controller;(8) digi-tal compensation flow closed loop controller.
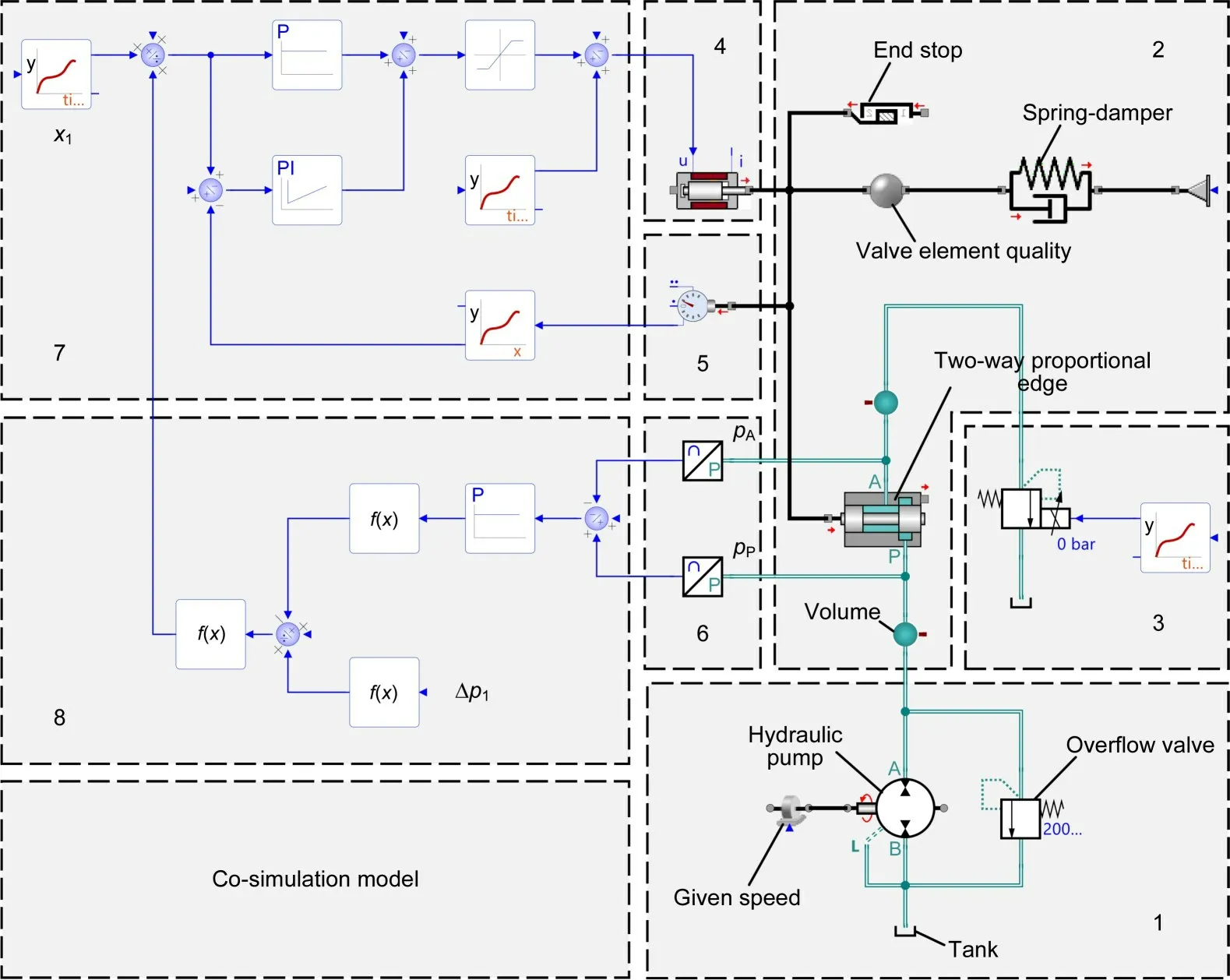
Fig.3 Co-simulation model of electrical modulation valve:1.hydraulic power unit;2.proportional valve;3.relief valve;4.proportional solenoid;5.displacement sensor;6.pressure sensor;7.valve element displacement closed loop controller;8.digital compensation flow closed loop controller.1 bar=1×105 Pa
The hydraulic power unit model is composed of given speed,hydraulic pump,overflow valve,and tank.The output flow value of the pump is always set to be greater than 100 L/min to meet the requirements of the simulation,and the relief valve plays a safety role.The proportional valve model is composed of valve element quality,spring-damper,end stop,volume,and two-way proportional edge.The two-way proportional edge module can set valve shape,area gradient,hydraulic diameter,overlap,and other parameters,and accurately and comprehensively express valve characteristics.The selected valve is a two-way proportional valve.Its set parameters are: an orifice diameter of 6 mm,a valve element diameter of 11 mm,a rated pressure difference of 3.5 MPa,a rated flow of 40 L/min,an area gain of 7 mm/mm,a maximum spool displacement of 1 mm,and a control voltage signalu
of 0-10 V.In order to make the simulation model more accurate,a volume module is added in front of and behind the valve to simulate the volume of oil in the hydraulic pipeline.The construction process of the valve element displacement closed loop controller and the digital compensation flow closed loop controller refers to the principle in Fig.2.Firstly,the model is simulated by the control scheme without flow compensation and only using the valve element displacement closed loop.When the valve openings are 20%,40%,60%,80%,and 100% (i.e.the given signalu
=2,4,6,8,and 10 V),the differential pressure of the valve port is graduallyincreased from 0 to 15 MPa,and the simulation curve of the electrical modulation valve is recorded,as shown in Fig.4.It can be seen from Fig.4a that under the valve element displacement closed loop control,the valve element displacement is stable,without fluctuation,and the control characteristics are good.It can be seen from Fig.4b that the flow through the valveincreases with the increase of the pressure difference under the five valve port openings,and the flow is proportional to the square root of the pressure difference,which is basically consistent with the flow formula,Eq.(1).When the valve opening is 100% and the pressure difference is 3.5 MPa,the flow is 40 L/min,which indicates that the model is correct.
Fig.4 Simulation curve without flow compensation:(a)valve opening curve;(b)flow curve
The model is then simulated by the control scheme with digital compensation flow.Input Δp
is 3.5 MPa.When the valve openings are 20%,40%,60%,80%,and 100%,the differential pressure of the valve port is gradually increased from 0 to 15 MPa,and the simulation curve of the electrical modulation valve is recorded,as shown in Fig.5.It can be seen from Fig.5a that when the pressure difference is 3.5 MPa,the valve openings are still 20%,40%,60%,80%,and 100% respectively,because Δp
is equal to Δp
at this time,and the calculated displacement correction coefficient is 1.When the pressure differenceincreases,the valve opening decreases to reduce the output flow due to the increasing rate of flow.When the pressure difference decreases,the valve openingincreases to increase the output flow due to the decreasing trend of flow.When the valve opening increases to 100%,the output flow is the maximum flow that can pass through the valve under the pressure difference.It can be seen from Fig.5b that the flows do not change with the change of pressure difference after the digital compensation flow scheme is adopted and are basically kept in a horizontal straight line,and a high-precision control of flow rate is realized.
Fig.5 Simulation curve with digital compensation flow(Δp1=3.5 MPa):(a)valve opening curve;(b)flow curve
It should be noted that the shaded area in Fig.5bis the“unadjustable region.”As the valve opening has reached 100%,it cannot continue to increase.When the pressure difference decreases,the flow cannot continue to increase.Taking the case of 100% valve opening as an example,when Δp
=3.5 MPa,the flowis 40 L/min.When Δp
>3.5 MPa,the flow is still maintained at 40 L/min by reducing the valve open-ing.However,when Δp
<3.5 MPa,the flow will decrease with the decrease of pressure difference because the valve opening is already 100%.The digital compensation flow scheme proposedin this paper can compensate the flow under different set pressure differences.Therefore,a simulation analysis with Δp
=0.8 MPa is also made.The simulation process is similar to the previous one.The simulation curve is shown in Fig.6.It can be seen from Fig.6a that when the pressure difference is 0.8 MPa,the valve openings are still 20%,40%,60%,80%,and 100% respectively,because Δp
is equal to Δp
at this time,and the calculated displacement correction coefficient is 1.When the pressure difference increases,the valve opening decreases,but when the pressure difference decreases,the valve opening increases.It can be seen from Fig.5b that the flow does not change with the change of pressure difference after the digital compensation flow scheme is adopted,andis basically kept in horizontal straight line,and a highprecision control of the flow rate is realized.Compar-ing Figs.6b and 5b,it can be seen that the area of the“unadjustable region” in Fig.6b is smaller,because the flow at 0.8 MPa is lower than that at 3.5 MPa,and thus the adjustable range increases.
Fig.6 Simulation curve with digital compensation flow(Δp1=0.8 MPa):(a)valve opening curve;(b)flow curve
4 Test research
The electrical modulation valve characteristic test research is carried out on the laboratory hydraulic valve test system.On the left is the principle of the test system,and on the right is a photo of the test system shown in Fig.7.The test system has three parts:hydraulic valve bedstand,tested valve,and power unit.The power unit is composed of a servo motor with rated power of 45 kW and a hydraulic pump with rated speed of 1500 r/min and displacement of 45 L/min.An electric proportional relief valve is installed at the outlet of the pump to control the output pressure.Two pressure sensors are installed at theinlet and outlet of the electrical modulation valve respectively.A throttle valve is installed at the outlet of the electrical modulation valve to control the outlet pressure.A pressure compensation valve is installed at the inlet of the electrical modulation valve.A flow sensor is installed behind the throttle valve,and the outlet of the flow sensor is connected to the oil tank.The whole system uses the software and hardware control system dSPACE 1103 to control the motor speed,relief valve pressure,and valve element displacement,and to transmit the real-time signal collected by each sensor to the computer.

Fig.7 Test system of electrical modulation valve:1.electrical modulation valve;2.pressure sensor;3.oil inlet;4.oil outlet;5.pressure compensation valve;6.throttle valve;7.flow sensor;8.pressure gauge;9.servo motor;10.hydraulic pump;11.electric proportional relief valve
Firstly,the scheme of flow control using a mechanical pressure compensation valve is tested.It isinstalled before the electrical modulation valve,and theinlet and outlet pressure difference of the electrical modulation valve can be adjusted to 0.8 MPa.When the valve openings are 20%,40%,60%,80%,and 100%,the differential pressure of the valve port is gradually increased from 0 to 15 MPa,and the test curve of the electrical modulation valve is recorded,as shown in Fig.8.It can be seen from Fig.8a that the valve opening of the electrical modulation valve has not changed after the pressure compensation valveis adopted.This is because the electrical modulation valve only adopts the valve element displacement closed-loop control.It can be seen from Fig.8b that when the pressure difference increases from 0.8 MPa,the flow remains basically constant,indicating that the accuracy of flow control by the pressure compensation valve is high.However,the pressure compensation valve can only adjust the pressure difference to 0.8 MPa.To change this value,a pressure compensation valve with other parameters is required.

Fig.8 Test curve with pressure compensation valve:(a)valve opening curve;(b)flow curve
Then,the digital compensation flow scheme proposed in this paper is used for the test.Input Δp
is 3.5 MPa.When the valve openings are 20%,40%,60%,80%,and 100%,the differential pressure of the valve port is gradually increased from 0 to 15 MPa,and the test curve of the electrical modulation valve is recorded,as shown in Fig.9.From Figs.9a and 9b,it can be seen that when the pressure difference changes,the valve element displacement changes accordingly,after the digital compensation flow scheme is adopted,so that the flow does not change with the change of pressure difference,thus realizing a high-precision control of the flow.The test curve in Fig.9 is basically consistent with the simulation curve in Fig.5,which verifies the correctness of the scheme.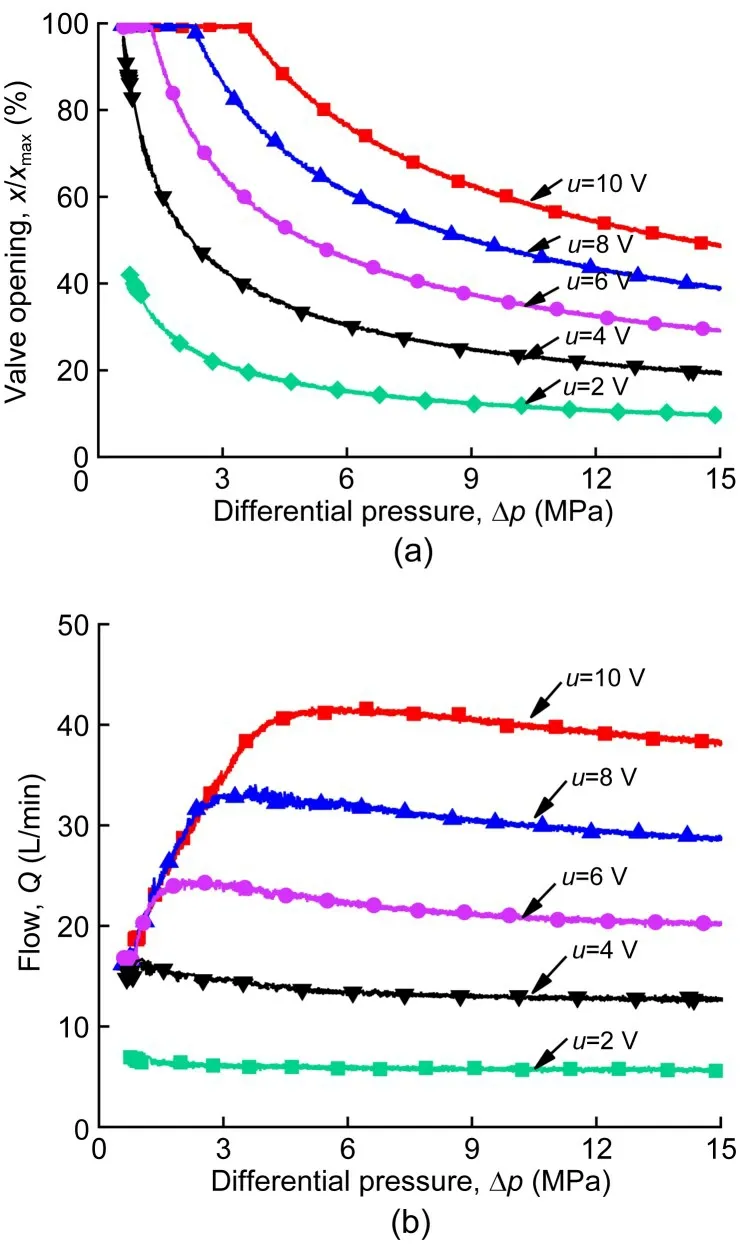
Fig.9 Test curve with digital compensation flow (Δp1=3.5 MPa):(a)valve opening curve;(b)flow curve
The test is also done when Δp
is set to 0.8 MPa.The test process is similar to the above.The test curve of the electrical modulation valve is recorded,as shown in Fig.10.It can be seen that the test curve in Fig.10 is basically consistent with the simulation curve in Fig.6,and the flow control accuracy is high.Comparing Fig.10b with Fig.8b,it can be seen that the flow control effect of the digital compensation flow scheme is basically the same as that of the pressure compensation valve.However,with the increase of pressure difference,the flow has a slight downward trend,especially in the case of a large valve opening,which may be caused by the change of flow coeffi-cient in the preliminary analysis.In future research,this factor should be considered to further improve the accuracy of flow control.
Fig.10 Test curve with digital compensation flow (Δp1=0.8 MPa):(a)valve opening curve;(b)flow curve
Finally,the dynamic characteristics of the digital compensation flow scheme are tested,and the valve opening curve and flow curve are recorded when the pressure difference changes suddenly,as shown in Fig.11.

Fig.11 Dynamic characteristic test curve of the digital compensation flow scheme
It can be seen from Fig.11 that when the system starts to run,the differential pressure is 6.8 MPa and the valve opening is 38%.At this time,the output flow is 19 L/min.From 0.8 to 1.0 s,the differential pressure suddenly increases to 11.2 MPa.At this time,the flow has an increasing trend.However,due to the digital flow compensation scheme,the valve openingis reduced to 30%,so that the output flow remains stable.After an overshoot,the flow is stabilized at about 18.3 L/min.From 2.0 to 2.2 s,the pressure difference suddenly decreases,and the valve opening increases rapidly,so that the output flow remains stable.The test shows that the digital flow compensation scheme has better dynamic characteristics.
5 Conclusions
The research shows that the scheme of digital compensation flow can keep the flow through a valve constant when the pressure difference changes and that the flow control accuracy is high.According to different flow requirements,the parameters can be setin the controller to flexibly adjust the set pressure difference.The scheme has the advantages of simple structure,good economy,and high flexibility.In this study,only the test curves with pressure differences of 0.8 and 3.5 MPa are given,but,in theory,this pressure difference can be set to any value.The system can also control the flow under the action of a mechanical pressure compensation valve,achieve the purpose of redundancy control,and improve the safety of the system.
The research object of this paper is a 6-mm ori-fice diameter electrical modulation valve.This princi-ple can be applied to the displacement-flow feedback large flow valve to realize high-precision control of the pilot valve flow,and thus high-precision control of the main valve flow.
Acknowledgments
This work is supported by the National Key Research and Development Program of China(No.2019YFB2004502),the National Natural Science Foundation of China (No.51975397),and the Key Research and Development Program of ShanxiProvince(No.201903D111007),China.
Author contributions
He LIU,Bin ZHAO,and Long QUAN designed the research.He LIU and Bo WANG processed the corresponding data.He LIU wrote the first draft of the manuscript.Bin ZHAO and Yun-xiao HAO helped to organize the manuscript.Long QUAN and Yun-weiLI revised and edited the final version.
Conflict of interest
He LIU,Bin ZHAO,Bo WANG,Long QUAN,Yun-xiao HAO,and Yun-weiLI declare that they have no conflict ofinterest.
杂志排行
Journal of Zhejiang University-Science A(Applied Physics & Engineering)的其它文章
- Copyright Information
- Activeflow co ntrol of S-duct by plasma synthhetic jet
- Active flow control of S-duct by plasma synthetic jet
- Experimental study of the bearing capacity of a drainage pipe pile under vacuum consolidation
- How fast is it to city centers?The average travel speed as an indicator of road traffic accessibility potential
- Effects of moisture content and dry bulk density on the thermal conductivity of compacted backfill soil