集装箱空轨货运系统装卸工艺设计及应用
2022-08-29汪宇亮
汪宇亮
(中铁第四勘察设计院集团有限公司 机动院,湖北 武汉 430063)
0 引言
目前国内集装箱自动化码头均无法实现铁水联运的无缝转运和换装,在港口建设规划中,由于货轮的集装箱运输能力与铁路的不匹配,往往也无法在港区后方直接建设铁路货运站,因而需要借助公路集卡运输才能完成码头堆场和铁路站场之间的转运,港区码头内部存在大量的中转箱需要通过陆路短途运输,港内车流复杂,铁路与港内公路的冲突日益增加,堵车情况时有发生。这样既影响了铁水联运的换装效率,也增加了物流成本[1]。研究提出一种空轨智能集装箱运输系统,借助空中轨道系统,实现港区各种集装箱集散点之间的互联互通,实现铁路、水运、公路、航空等物流体系之间的有机衔接,达到“无缝化衔接”要求。
集装箱空轨货运系统作为一种解决多式联运衔接问题的集疏运系统,目前还没有进入实际应用阶段,青岛港规划研究阶段提出并设计了一种多式联运空轨集疏运系统,该系统具有运行安全可靠、建设周期短、成本低、线路适应性强等特点,但如何提高自动化程度和装卸效率,梳理港口和铁路货场之间的接驳,并充分利用土地,节省开支是目前亟需解决的问题[2]。
1 空轨线路概况
武汉阳逻港集装箱空轨货运工程将江北铁路货运站作为铁路集装箱集散地,线路以货运站起点,经过江北铁路线,再跨越索子长河后沿华能电厂西侧的堤江路内侧南向延伸,穿过江北快速路后,起坡越过江堤路,沿亚东水泥厂与江堤路之间的防洪林带,一直延通到港口三期总规划的码头堆场末端,线路全长约10.0 km。由于本项目要跨越江北电气化铁路线和快速路以及防洪林带及煤炭皮带运输线,因而线路坡度最大可达10%,最小曲线半径为50 m。
集装箱港分一、二、三作业区,其中三作业区总体规划17 个集装箱泊位,将直接助推阳逻港达到500 万TEU 的年吞吐能力。综合预计,初期2025 年空轨货运系统运量为30万TEU。
集装箱空轨集疏运系统负责港口作业区至铁路货场之间的集装箱转运,由货运动车(指空轨装载集装箱的牵引车)、轨道系统、车辆停放与检修设施和应急救援设施等组成,集装箱空轨集疏运系统效果图如图1 所示,目前研究重点为货运动车的选型和转运站装卸布局。

图1 集装箱空轨集疏运系统效果图Fig.1 Container collection and transportation of air-rail freight system
2 集装箱空轨货运动车选型研究
2.1 货运动车选型
空轨货运动车主要由车体、转向架、牵引传动及控制系统、制动系统和走行装置等组成[3]。货运动车效果图如图2所示。

图2 货运动车效果图Fig.2 Renderings of freight traction car
(1)走行装置。货运动车拟采用对称胶轮型悬挂式单轨车辆,其主要特点是转向架对称布置于底部开口的轨道箱型梁内,转向架上对称设计了走行轮和导向轮。车体悬挂装置通过箱型梁底部开口将车体和转向架连接起来。车体由集装箱和集装箱吊具组成。集装箱可通过集装箱吊具灵活拆解。列车行驶方向的改变,通过道岔(箱型梁内的可动轨)的水平移动来实现。货运动车及胶轮结构如图3所示。
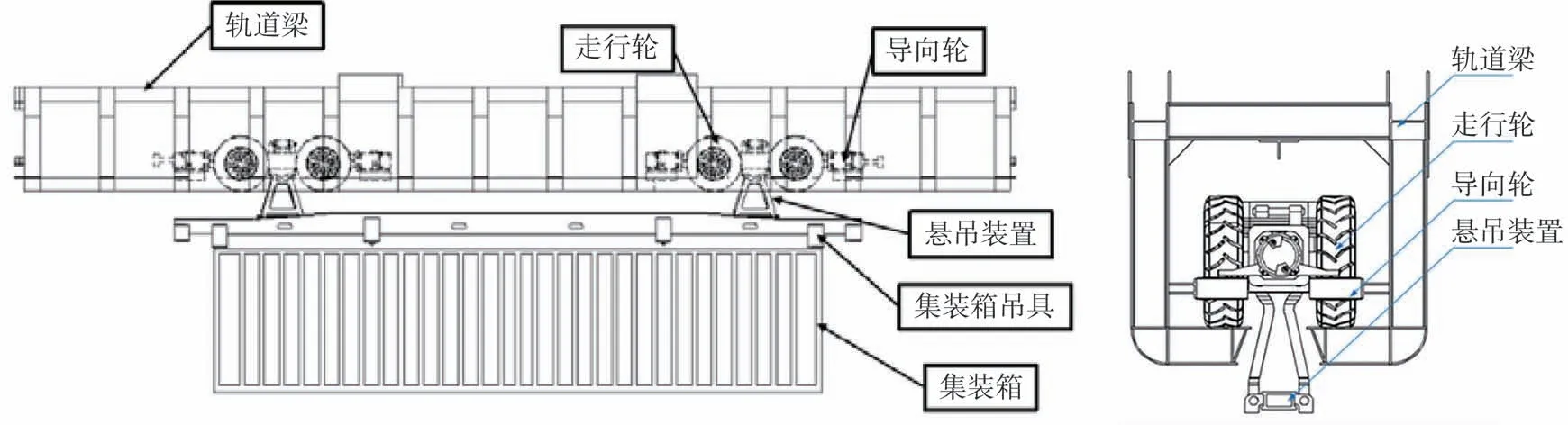
图3 货运动车及胶轮结构Fig.3 Freight traction car and rubber
对称胶轮型悬挂式单轨车辆的主要技术优势有以下4 点[4]。①运行安全。对称胶轮式悬挂式单轨车辆,设计了橡胶材质走行轮和导向轮,其走行机理与传统钢轮钢轨系统完全不同。在列车运行过程中,整个转向架及运行轨道都在箱型轨道梁内部,没有脱轨的可能性,安全可靠。②线路适应性强。橡胶材质走行轮的粘着性能好,最大坡度可达6%,能通过的最小曲线半径可达25 m,对复杂地形有较好的适应性,选线容易,可减少拆迁量以及施工期间对地面交通的影响。③环境适应性好。车轮和轨道置于封闭轨道梁内,车轮采用胶轮,受力分散,梁体可吸收振动,运行噪音低。采用电力牵引,列车运行中无排放,利于保护城市环境。桥梁基本采用钢结构、截面尺寸小,线路和车站可沿道路一侧或中间绿化带设计,对日照和景观影响小。由于车轮封闭在箱型轨道梁内,受恶劣天气影响小,当遇到雨雪、下雾、冰冻、大水等恶劣天气时,可照常运营,适应天气变化相对较大的环境。④施工简便。桥梁和轨道梁以钢结构为主,可实现工厂预制,现场组装,施工难度小,土建工程简单,可大大缩短建设工期[5]。
(2)转向架。转向架由构架、橡胶走行轮、橡胶导向轮、驱动装置、基础制动装置、受流装置、中央吊挂装置等组成。每个转向架安装2 台交流电机,单轴独立驱动;采用中央悬吊装置实现车体与转向架连接,传递垂向力、纵向力和横向力。中心销底部与两根悬吊臂的另一端也采用中央悬吊装置的方式实现铰接。设置安全钢索连接吊具和中心销,确保空轨货物列车载运集装箱时的安全。
(3)牵引系统。采用变频变压逆变器调速、永磁同步电动机驱动的交流牵引传动系统。此系统与直流电机相比,构成较为简单,价格便宜,后期运营维护工作量较小,可以满足空轨列车小型化和高功率密度的要求。牵引电机采用轮毂电机牵引,对于空轨列车的单电机牵引驱动方式来说,轮毂电机的优势是结构简单,电机输出轴可以与车轮直接装配,减少了减速箱、传动齿轮等部件。由于集装箱空轨货运系统主要进行集装箱的运输,速度要求低,可以适当牺牲舒适性来降低造价,提高传动效率,并尽量缩小尺寸,因而采用轮毂电机牵引。
集装箱空轨货运动车作为纯电动车辆,其功率全部来源于电机,为满足使用需求,牵引系统需从集装箱重量、最高车速、最大爬坡能力和加速时间4 个方面考虑。
根据本项目特点,全部采用20 ft 标准集装箱,总质量不超过45 t,最高车速30 km/h,最大坡度为10%。牵引力计算公式为

式中:Ft为货运动车驱动力,N;Ttg为电机转矩,N·m;i0为最终传动机构传动比;θ为传动效率,本次研究取0.95;γ为车轮半径,m,本次研究车轮半径按0.21 m考虑。
集装箱货运动车在空轨上运行时主要阻力有:水平行驶时车轮的滚动阻力和空气阻力,上坡行驶时重力坡度方向的阻力,加速行驶时的加速阻力。集装箱货运动车在行驶时所有阻力之和为其总阻力。

式中:Ff为水平行驶时车轮的滚动阻力,N;Fw为空气阻力,N;Fi为上坡行驶时重力坡度方向的阻力,N;Fj为加速行驶时的加速阻力,N。
由于集装箱货运动车采用对称胶轮,滚动阻力Ff主要由胶体材料的滞变作用和空轨刚性轨道的塑性变形导致的,滚动阻力计算公式为

式中:G 为重量,N,本次研究按照车辆自重加上集装箱质量来考虑,合计45 000 kg,重量合计45 000×9.8 N;f为摩擦系数,本次研究取0.016;α为轨面倾斜角度,取值本线最大坡度10%,倾斜角度为5.5°,cosα=0.996。

无风条件下空气阻力计算公式为

式中:CD为空气阻力系数,本次研究取0.6;A为集装箱空轨迎风面积,m2,按照集装箱和车身宽(2.44 m)×车身高(2.89 m)来计算,取7.051 6 m2;V为货运动车速度,m/s,速度目标值为30 km/h,即8.33 m/s;ν为迎风系数,根据经验取值21.15。

货运动车在下坡行驶过程中,集装箱及货运动车的重力坡度方向的分力会产生加速,反之,在上坡行驶过程中,会减速。坡度阻力计算公式为

货运动车加速过程中的加速阻力计算公式为

式中:δ为空轨集装箱货运动车旋转质量换算系数,与列车旋转部件的转动惯量有关,根据经验公式取1.2;m为质量,kg,本次研究按照车辆自重加上集装箱重量来考虑,合计45 000 kg;t为加速时间,按照集装箱运输能力及安全考虑,速度从0 到30 km/h,取0.7 m/s2。

根据公式⑵至公式⑹计算可得

按最高车速30 km/h,公式⑴两边同时乘以速度并转换单位,可推导出牵引电机功率Pn计算公式为

式中:Pn为牵引电机输出功率,kW;i0为电机的传动比率,牵引电机采用轮毂电机,电机输出轴与车轮直接装配,无减速箱传动齿轮等部件,此时传动机构传动比i0=1。

货运动车每个车轮采用轮毂电机单独驱动,单个轮毂电机的功率计算公式为

式中:Pn1为单个车轮牵引电机输出功率,kW,4 个车轮为160.4 kW,由上述计算可知轮毂电机可选用额定功率42 kW的电机。
取最终传动机构传动比i0为1,根据车轮直径,最高运行速度,可得出车轮的最高转速为

式中:nmax为车辆最高转速,r/s。

本次研究轮毂电机主要参数如表1所示。

表1 轮毂电机主要参数Tab.1 Main parameters of hub motor
(4)制动系统。考虑到集装箱空轨货运动车需要搬运集装箱通过桥涵的要求,制动系统推荐采用液压方式制动,与空气制动进行比较,液压制动方式的结构更简单,并且节省空间。
2.2 货运动车编组形式
根据运量预测结果,本线近期(2030 年)、远期(2040 年)年货运量分别为25 万TEU、30 万TEU;按每天运营时间16 h计算,本线研究年度近、远期单位小时货运量22 TEU/h、26 TEU/h,近、远期运用车分别为11列、23列,货运动车运行交路如图4所示。

图4 货运动车运行交路Fig.4 Operation road map of freight train
根据初步系统配置方案,本线采用基于无线通讯的列车自动控制系统,可实现货运动车2 min 的最小行车间隔。本线输送能力适应情况如表2所示。

表2 输送能力适应情况Tab.2 Conveying capacity adaptation
通过分析,研究年度本线输送能力可以满足运量需求。本项目运输能力受限于运输车辆的编组辆数,近期车辆采用单辆编组,转向架型式为:M+M,项目远期采用长编组(2 辆及以上编组)可将系统年运输能力提高到70万TEU及以上。
2.3 车辆主要参数及适用条件
车辆主要参数及适用条件如表3所示。

表3 车辆主要参数及适用条件Tab.3 Main vehicle parameters and applicable conditions
3 集装箱空轨货运系统转运站装卸布局研究
本系统起点和终点两端设集装箱装卸站各一处,起点端一般为铁路中转端,终点端一般为港口端,装卸点的设置均按“到达卸载、出发装载”的原则进行布设。
3.1 铁路中转中心端方案
铁路中转中心主要负责将从港口运输过来的集装箱进行卸载,并将空箱装载至运输系统中,因而在铁路中转中心站分设集装箱装载点1 处、集装箱卸载点1 处。货运动车经过卸载后,在线路终点,空载货运动车可选择回段停放或立即折返并发往港口站[6]。
货运动车折返有以下2种方案。
(1)方案Ⅰ:方案Ⅰ铁路装卸站示意图如图5 所示,采用单渡线道岔进行过渡,道岔的侧向最高通过速度为16 km/h,道岔转辙时间≤15 s,满足全线运行节拍的需求。

图5 方案Ⅰ铁路装卸站示意图Fig.5 Schematic diagram of the railway loading and unloading stations in scenario Ⅰ
(2)方案Ⅱ:在线路终点按三角线的方式设置,方案Ⅱ铁路装卸站示意图如图6 所示。当空车需要折返时,断开道岔4、接通道岔3,实现折返;空车可通过道岔5 直接出段;当空车需要入段时,断开道岔3、接通道岔4,可实现空车入段[7]。

图6 方案Ⅱ铁路装卸站示意图Fig.6 Schematic diagram of railway loading and unloading stations in scenario Ⅱ
2个方案对比如下。
(1)方案Ⅰ结构简单,仅需要1 组道岔,控制方便、造价相对较低。
(2)方案Ⅱ结构复杂,需要多组道岔相互配合实现车辆的折返以及出入段,控制复杂且造价相对较高。
由于每组道岔都有限速要求,道岔越多,限速越严重,制约系统的运输能力,因此,从造价、运输效率等角度考虑,推荐采用方案Ⅰ。
根据铁路中转中心的规划情况,铁路中转中心布置图如图7所示。
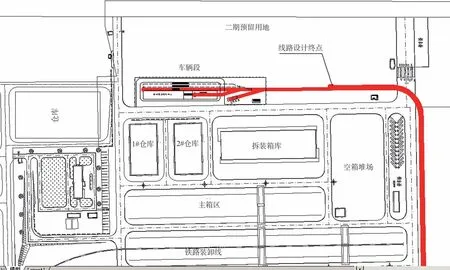
图7 铁路中转中心布置图Fig.7 Layout of the railway transit center
3.2 港口端方案
港口装载是指港口站的集装箱发往公路中转中心时,空载货运动车在港口装卸点装载,由港口站出发运往公路中转中心;港口卸载是指货运动车到达港口站,在卸载点卸载;空载货运动车到达港口站,直接通行开往装载点。
港口货运动车折返有以下2种方案。
(1)方案Ⅰ:方案Ⅰ港口装卸站示意图如图8 所示,采用单渡线道岔进行过渡,道岔的侧向最高通过速度为16 km/h,道岔转辙时间≤15 s,满足全线运行节拍的需求。
(2)方案Ⅱ:方案Ⅱ港口装卸站示意图如图9 所示,采用环线方式进行折返,从公路中转中心过来的货车经过卸载后,经过环线直接回段,环线曲线半径50 m。
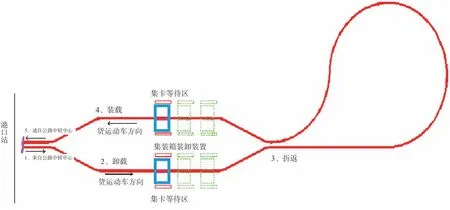
图9 方案Ⅱ港口装卸站示意图Fig.9 Schematic diagram of port loading and unloading stations in scenario Ⅱ
采用环线折返方案占地较大,会对港区作业产生干扰,因而建议采用方案Ⅰ。
3.3 集装箱转运方式技术经济比较
空轨货运系统相对于其他的转运方式,更加经济、安全和灵活,比较适合港区集装箱自动化码头的运输体系(固定投入、维护成本,影响运费主要因素为运输距离和运量)[8],空轨、接驳船、铁路、集卡转运方式性能指标对比如表4所示。
从表4 中可以发现集装箱空轨货运系统是一种效率更高、成本更低的运输方式,且其在运输过程中无人驾驶,只是在装卸过程中需要人工参与,可以达到智慧、环保、高效、节能的目的。集装箱空轨货运系统适用于阳逻港港区集装箱货物在铁路与港口之间的中短距离转运,随着港口集装箱逐渐增加,可以通过加配货运动车来实现运输能力的提高。

表4 空轨、接驳船、铁路、集卡转运方式性能指标对比Tab.4 Comparison of performance indicators of air-rail,feeder,railway,and collection truck transportation mode
4 结束语
集装箱空轨货运系统可以通过开辟空中通道,提升枢纽承载能力、衔接转换能力,缓解现有通道不畅及运输压力。随着“一带一路”倡议的稳步推进,长江黄金水道沿线港口的集装箱场站建设工程也将越来越多,铁路货运站与港口、公路集疏运区之间通过空轨货运系统实现转运将大大提高转运效率,空轨多式联运通道的建设应用前景广阔。