基于单片机控制的清扫机器人的设计
2022-08-29王自凯刘立群李爱民易多轩徐小韦
王自凯,刘立群,李爱民,易多轩,徐小韦
(甘肃农业大学 信息科学技术学院,甘肃 兰州 730070)
0 引 言
进入21世纪以来,随着计算机技术、微电子技术和传感器技术的发展,人们在能实现控制模式的传统机器中添加了处理器,清扫机器人就是其中之一。然而,无论是在国内还是国外,清洁机器人的价格都偏高。因此,本课题研究设计了一种智能清洗机器人,该机器人能够进行清洗和避免污染等操作。本项目设计成本较低,人为干扰少,实用性强,可靠性高,有广阔的发展前景。
1 系统硬件设计
本次设计的智能清扫机器人硬件部分以STC89C52单片机为核心,借助红外避障模块检测外部情况,由风扇驱动模拟清扫过程,按键电路作为启动部分,电机驱动为装置提供动力,还包括麦克姆轮等其他部分。系统硬件设计如图1所示。

图1 系统硬件设计
1.1 按键电路设计
此次设计的启动部分采用按键方式。按下按键后,电路接通至高电平,开关接通;松开按键,电路接通至低电平,开关断开。在本次设计中,按键作为系统的启动部分,能够将智能清扫小车与人连接起来,实现对系统的手动输入。该方式操作简单,使用便捷,符合本次设计的需要。按键电路原理如图2所示。
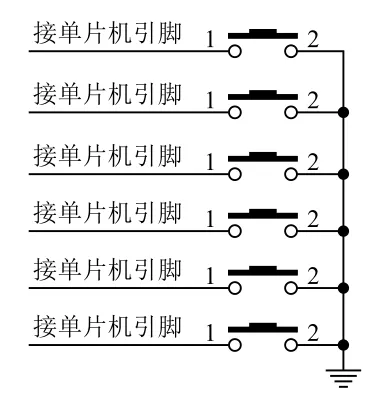
图2 按键电路设计
1.2 BD681风扇驱动电路设计
在清洗方面,风机正常工作需要通过系统内部的能量转换实现。首先,电能转化为电磁能,之后再转化为机械能,最后转化为动能。由于单片机无法直接控制风扇的发动机,因此我们选择用大功率三极管进行控制。由于三极管能承受的电流有限,FIM可以防止三极管损坏,故使用限流电阻来限制三极管中的电流。在连接关键电路时,三极管连接高电平,风扇驱动电路响应,风扇开始旋转。电路断开后,三极管连接至低电平,风扇停止转动。风扇控制电路如图3所示。
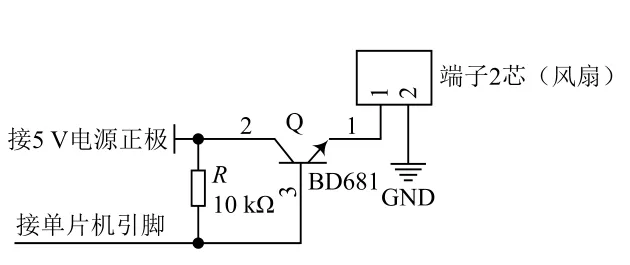
图3 风扇控制电路
1.3 红外避障传感器模块电路设计
红外障碍物防护传感器选择E18-D80NK-N,它既能发射光束也能接收光束。当传感器发出红外光时,遇到物体红外光会被反射回来,反射的光束被传感器接收。检测到反射光后,传感器将自动计算物体距离。传感器还可以避免可见光的干扰。传感器利用透镜大大增加了传感器的检测距离,80 cm范围内的物体基本都能被检测到。除此之外,该传感器还具有价格更低廉、装配更容易、使用更便捷等特点,符合此次设计的要求。由于光速远比超声波传播速度快,所以红外线测距在与超声波测距的对比中优势明显,其传播和反射时间更短,能更快地预警。红外避障传感器模块原理如图4所示。
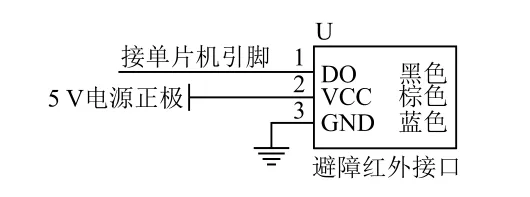
图4 红外避障传感器模块原理
1.4 L298N电机驱动模块
选择的发动机模块为L298N,它不仅可以驱动两级发动机,还可以驱动四相发动机,甚至驱动S35,同时也可以接收TTL电平信号。驱动模块芯片由H双工桥引擎驱动。CadA H电桥可提供2 A电流。该部分电源范围为2.5~4.8 V,逻辑部分的电源为5 V,可直接控制DC-DC发动机的转速和方向。直流发动机为无刷直流发动机,可保证机器人完成相应操作。该发动机能够很好地满足清洗机器人的能源需求,最大限度利用能源而不浪费,完全满足设计要求。电机驱动模块原理如图5所示,电机驱动实物如图6所示。
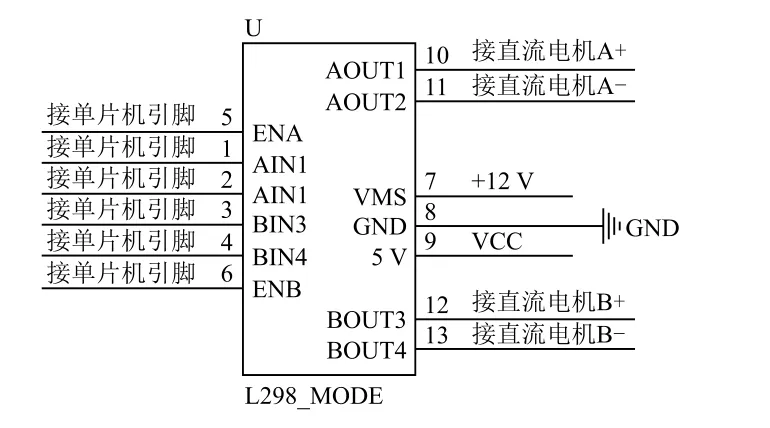
图5 电机驱动模块原理
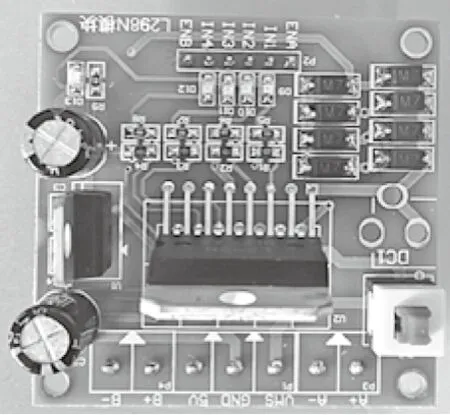
图6 电机驱动实物
2 系统软件设计
系统软件基于Keil编译环境,采用C语言编程设计。C语言较汇编语言可执性更高,应用过程更加方便,即使编程人员不了解单片机处理器的结构,也可以应用C语言的编辑器完成程序设计。系统初始化后,在单片机的控制下,系统驱动装置以及风扇驱动电路响应,同时避障传感器对周围环境进行检测,并根据实际情况做出反应。基于Keil的C语言程序设计如图7所示。
选取2016年1月—2017年12月我院纳入的400例白内障行小切口手术治疗患者作为研究对象。所有患者均对本次研究知情,自愿参与。为保证研究的科学性,本次研究将合并有严重器质性疾病、肿瘤疾病、全身感染性疾病、妊娠或哺乳期女性、有过眼部手术史、精神病史患者排除在外。其中,男235例,女165例;患者年龄为39~82岁,平均年龄(57.09±11.03)岁;晶状体硬度LOCSⅡ分级:Ⅰ级0例,Ⅱ级129例,Ⅲ级156例,Ⅳ级115例。本次研究符合医学伦理。

图7 基于Keil的C语言程序设计
3 系统电路
智能小车电路如图8所示。
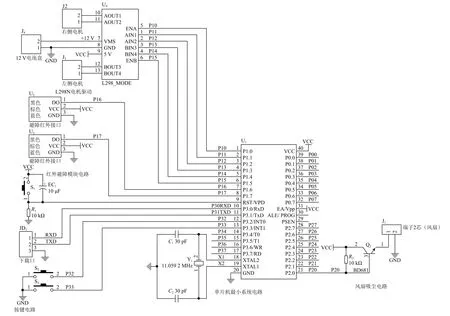
图8 智能小车电路设计
4 结 语
本次设计的清扫机器人以STC89C52作为控制中枢,芯片编写程序简单,系统兼容性好,价格低廉,抗干扰能力强。智能清扫小车采用了软硬件相结合的方式,使实验功能更加丰富。测验结果证明,该设备基本能实现所有预期效果,满足小车进行智能清扫的需求。
