基于光伏新能源及群体智能的自主栽种灌溉植树机
2022-08-29王婉婷王鹏
王婉婷,王鹏
(北方工业大学 电气与控制工程学院,北京 100144)
0 引 言
这是一款集种树种草,根据土壤湿度进行节水灌溉,依靠锂电池和太阳能同时供电的植树机。本文设计的植树机栽种的数量比人工栽种多141.6%,可以节约人力物力,提高栽种的速度。在节水节能、减少CO排放等方面上有重要意义。
1 设计方案
本文中设计生产的植树机主要适合用于在林地、山区、沙地荒漠等环境复杂或多变恶劣的环境状态下植树,具备栽种树苗、节水灌溉、无线通信等多种功能。植树机由钻孔机构、灌溉机构、推土机构、树苗栽种机构组成,搭载追踪式太阳能板,使用锂电池和光伏发电双重供电保障。
植树机通过5G 通信技术,运动到指定作业区域。内置传感器将环境数据传送给工作站。土壤湿度传感器检测土壤湿度值转化为电信号,单片机根据土壤湿度值控制植树机上携带的水箱进行节水灌溉。植树机前方携带的钻头挖掘土坑后,向前移动至树苗下落通道出口与土坑位置相同时停下,同时装有树苗的转盘旋转一定角度使树苗落下。推土机构推动隆起的泥土落入坑洞中填埋,本装置的总体设计思路框图如图1所示。
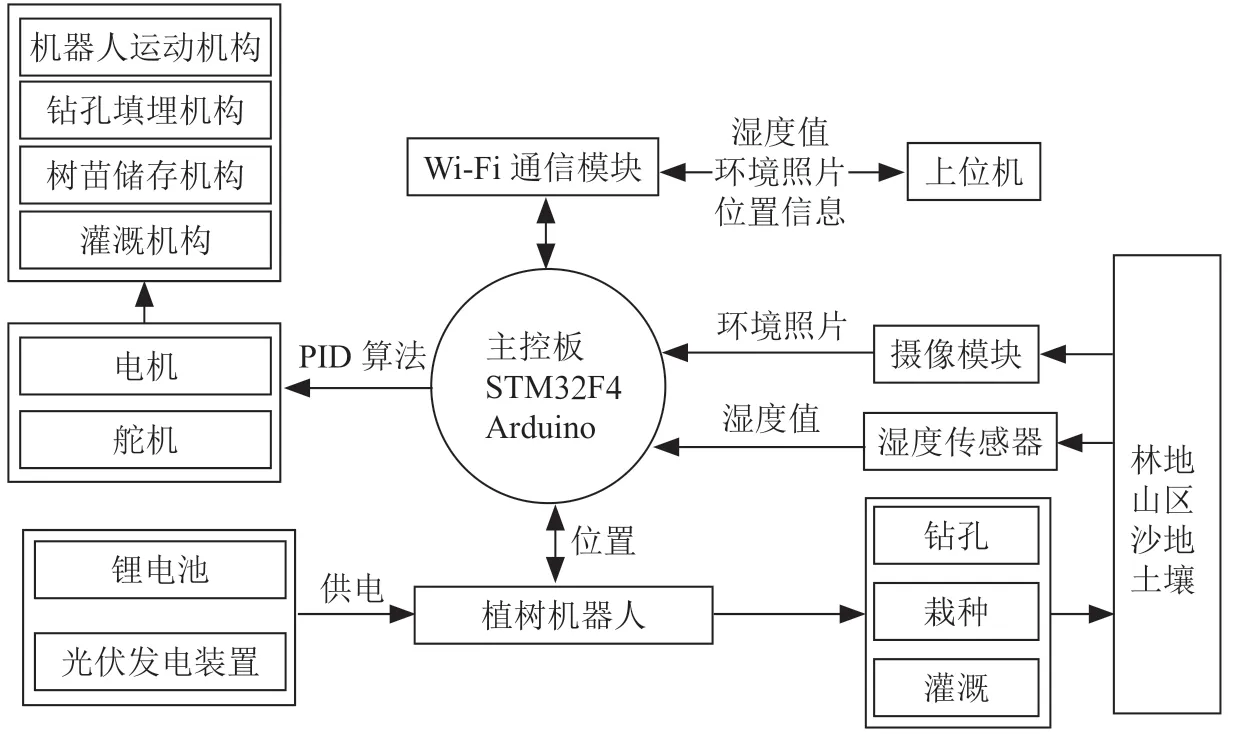
图1 总体设计思路
1.1 电器控制
选用STM32F4 和Arduino 作为主控板,使用直流无刷减速电机和PID 算法精确控制转速及位置。
太阳能追踪系统采用光电转换模式,由传感器感受光源,将识别的数据反馈到系统中,控制太阳能光伏板转动,达到自动追踪效果,同时将太阳能转化为化学能为后续装置供电。由太阳能光合硅能蓄电池组成的供电模块,由太阳能追踪系统高效收集光能,为13 V 光合硅电池供电,再由电源变压器转化为24 V 直流电。使用张力计式湿度传感器,把检测到的土壤湿度信号放大以后,进行传送至单片机内部的交流/直流转换电路,将得到的数据进行处理得到土壤的湿度值。中央处理器根据湿度值控制水箱电磁阀开关浇灌需要的水量。
1.2 机械结构
在控制系统调控下,机身运动到指定位置。打孔机构开始工作,打孔机构由升降机构,钻头,土壤湿度测试仪构成。
升降台共有4 条横梁,4 条侧梁。下横梁通过铝型材和钣金金属连接件与电机架链接,上横梁与电机架接触,最大程度上将电机所受到的轴向力通过侧梁与下横梁共同作用,将力传导至机架。
电机通过6 转8 梅花联轴器与8CM 高碳钢钻头链接,钻头根部通过一个角接触球轴承固定导向,电机如图2中标号1、2、3 所示。
钻头在升降机构带动下,向下运动,从而在地面上钻出坑洞,同时土壤湿度测试仪前段插入土壤中,返回土壤湿度数据,如图2(a)(b)所示,是钻孔升降机构。
储料仓由内外两个转盘,和转盘上的物料存放桶组成,转盘机构如图2(d)所示。最大程度上合理运用空间,增大单次树苗的携带数量,单次可携带64 棵树苗。每个转盘由独立舵机驱动。打孔机构工作完毕后,车身向前移动固定距离,储料转盘转动,物料存放桶与底盘的出料口配合后,土培与树苗通过Y 型输料管落入土坑中。
栽种机构工作完毕后,推土机构如图2(c)所示,开始工作。推土机构:电机驱动相配合的齿轮齿条,齿条与滑槽链接,滑槽末端的钣金推铲在齿轮机构传动下,推动泥土落入坑洞中。之后,电机反向转动,带动推土铲复位。
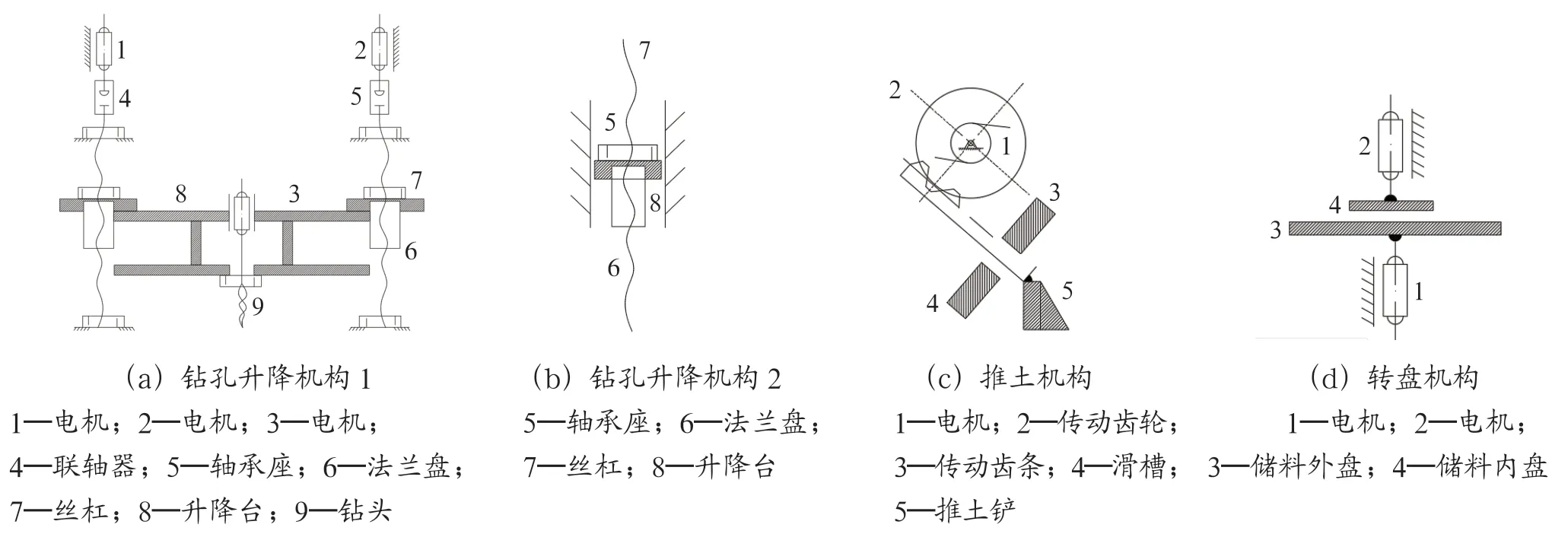
图2 机构示意图
推土铲复位后,车身再次向前移动固定距离,灌溉机构开始工作。灌溉机构由储水仓和电磁水阀组成。车身停止运动后,电磁水阀打开,水仓中水流出,灌溉时间根据返回的土壤湿度做定量计算。内部结构渲染图如图3所示。
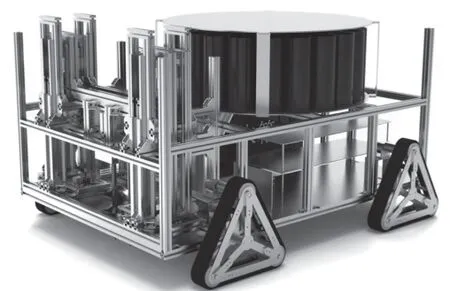
图3 内部结构渲染图
2 工作原理
2.1 自主栽种
本装置中通过STM32F4 主控板对伺服电机进行编码控制,由于栽树钻孔为连续的过程,设置系统到达的起点并将位置参数归0,设置间隔点距离,开始自动运行程序。到达最佳钻孔点后植树机停止前进,给定伺服电机驱动器脉冲信号以控制角位移量,控制两侧伺服电机A、B 转动固定的角度。植树机实物如图4所示。设定A、B 电机控制系统为单闭环负反馈控制,反馈为下降距离:如果A 转动的角度大于B,则反馈闭环系统控制降低A 转速,反之控制降低B 转速,以保持电机A、B 以相同的速度下降。控制钻头的伺服电机C 与A、B 同时开启,带动钻头逆时针旋转,此时,在电机A、B 的作用下,钻头即可挖出土壤形成树坑。当系统检测到达下降额定深度时,电机C 停止旋转,电机A、B 反转以收回钻头,回归原位后A、B 停止旋转。放入树苗完成后重复之前动作,直到完成系统设置的种植数量或者距离。钻头控制原理如图5所示。
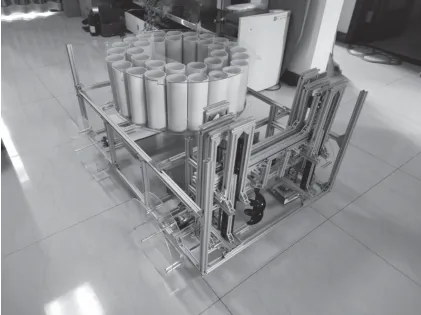
图4 植树机实物图
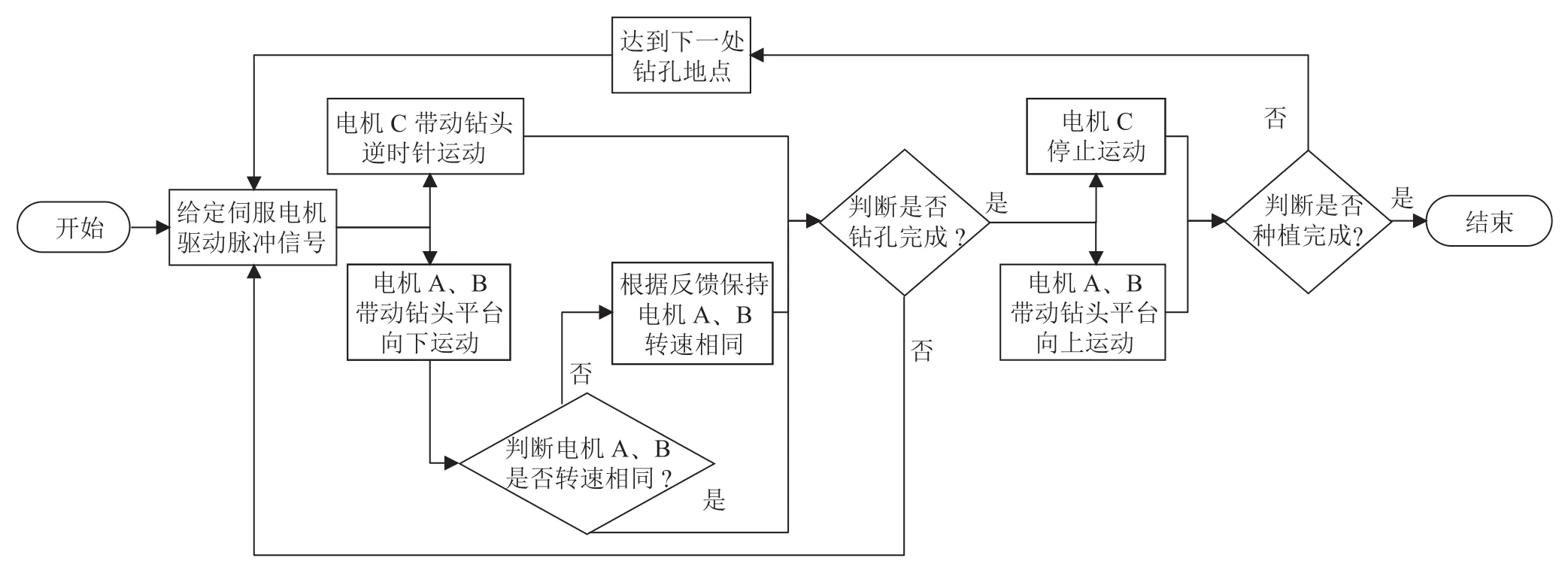
图5 钻头控制原理
2.2 节水灌溉
张力计式土壤水分传感器,有个多孔瓷头,它能够直接或通过任何一根用来充或放水气分的金属管子与另一个真空表装置相连接,该真空传感器装置被直接插入到了土壤表层上的另一个金属钻孔腔道中,多孔的金属瓷头能直接地与岩石表层土壤层紧密地贴合,真空表装置就这样设在于地面岩石之上。
首先需要通过土壤温度检测传感器自动检测出土壤湿度参数并同时输出一个与其数值相对应位置的温度模拟测量信号,然后再经过数字模拟A/D 信号的转换输出电路来将这个模拟温度信号再转换输出至模拟数字信号,发送指令给单片机,通过镶嵌状的微控制器MCU 操作后传送到采集单元,再经过GPPS 网络传输到管理中心计算机上,就会自动呈现出关于湿度的数值情况。
GPRS 板块收到利用串行口反馈的数据后,通过网络关口将其传输到Internet 上,与Internet 相连的中心站计算机就会得到数据。
单片机将采样值与程序中设置的树苗生长需要的湿度进行对比,判断灌溉量,发送信号控制水箱电磁阀门自动开关的时长,从而实现对灌溉水量的自动调节,最后达到节约水量的目的。
2.3 群体智能协作系统
为了提高栽种效率,建立以蚁群算法为基础的群体调度系统,在一个区域内多台植树机相互协作,智能作业。
各台植树机(效用估计值大者获得该任务的执行权)协同作业实现速度匹配,防止碰撞。合理有效地进行任务分配和调度,通过传感器获取环境信息,通过无线通讯技术与其他设备进行信息交互,最后通过数据运算自身环境信息,做出运动决策。我们选用蚁群算法解决最优路径问题。
3 性能分析
太阳能追踪系统采用光电转换模式,由光敏电阻传感器感受光源,将数据反馈到单片机中,并发出指令控制太阳能光伏板双轴转动,达到自动追踪的效果。电源使用光合硅能蓄电池,由于自动追踪的同时将太阳能转化成了化学能储存到了蓄电池中,从而实现循环结构。电池标准容量60 Ah,输出标准电压24 V,充电电流4 A,最大放大电能转移过程中的流失率低至0.2%,能量增值效益达到8 ~30 倍,从而实现节约电能的目的。
以栽种吸收CO能力最强的毛泡桐树苗为例,根据表1的数据,一公顷土地上50 台植树机同时工作,两个月时间可以种植生态修复林10 公顷,每年可吸收二氧化碳1 236 吨,可减少全国每年0.93%的碳排放量。

表1 碳吸收相关数据
4 应用与市场
以一台植树机为单位进行计算,年节约电量168.5 kWh,年节约水量7 234.2 L,成本约3 200 元,以甘肃地区为例(具体水电费用各地不同),电费0.51 元/kWh,水费1.33 元/L,一年可以节约水电费成本9 707.4 元。分析结果表明,一台植树机的植树效率是一个工人的1.4 倍,节省下来的年均人工成本是1.5万元左右。如图6所示是我们设计的植树机和传统人工栽种的开销对比图,可以看到在投入当年八月以后,植树机的开销成本就会低于传统人工种植方案。所以,使用植树机替代传统人工的处理方法,可以大大节省人力和物力资源。
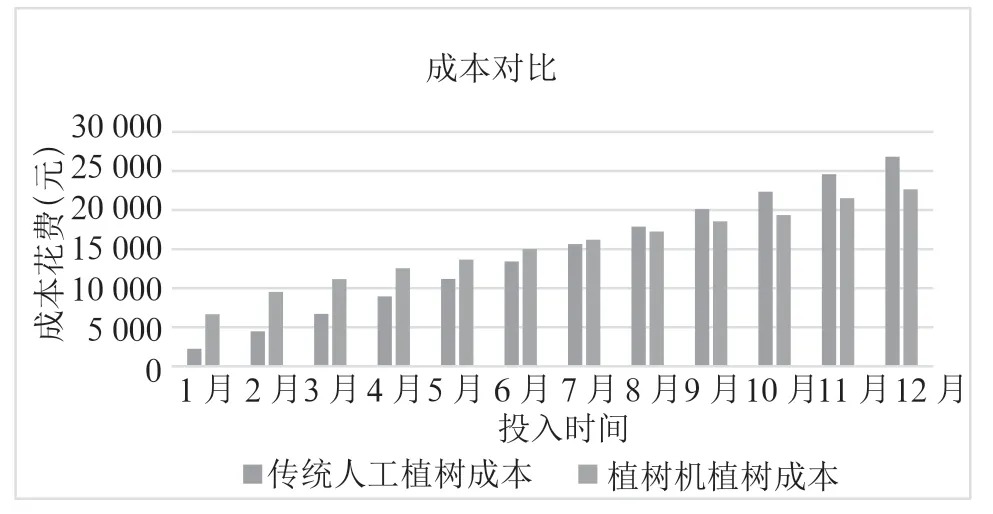
图6 开销对比图
5 结 论
综上表明,我们所设计的植树机可以有效节省人力物力,与传统人工植树相比开销较小,可以广泛应用于国家提倡的植树种草项目中,具有一定推广价值。