基于多传感器的内陆水域水上水下一体化测绘技术探索
2022-08-29杨溯陈龙胡一川山威
杨溯,陈龙,胡一川,山威
(自然资源部第三大地测量队,四川 成都 610100)
0 引 言
2015年6月1日,国务院批复同意《全国基础测绘中长期规划纲要(2015—2030年)》,提到要“持续整合、丰富、更新基础地理信息资源”“加快建设新型基础测绘体系,工作范围由陆地国土向海洋乃至全球拓展,大幅提升基础地理信息资源供给能力”,抓紧“启动内陆水体水下地形测绘”。2019年自然资源部下发《自然资源部信息化建设总体方案》,提出“立足山水林田湖草整体的生态系统角度,实现面向国土空间全域、多尺度、多类型资源状况和变化的统一的调查监测评价;推进二维调查走向三维调查,实现地上地下三维一体化监测评价。”内陆水下地形数据是水资源利用保护、水利工程项目建设的基础性支撑。随着单波束测深仪,尤其是具有较高的测点密度和较宽扫幅的多波束测深仪在水下地形测量领域的广泛运用,水下地形获取过程简单、效率高、覆盖度高,数据成果更加的精准可控,易于建立高精度水下地表模型及矢量数据模型。同时,利用航摄技术、雷达技术获取地面影像数据、高密度点云数据,能够实时高效地建设实景三维模型及高精度地球表面模型。
本文针对在使用多波束测深仪进行内陆水下地形测量过程中遇到的浅水区数据空白的问题,提出利用多波束侧扫装置及单波束船补测的方式消除空白区的方案。利用数据处理软件提取机载LiDAR 数据地表点,融合水下声呐点云数据,构建水上水下一体化数字高程模型,形成水陆一体化无缝高精度数字产品,一体化测绘工作效率以及成果精度得到有效提高。在此基础上,结合自然资源调查数据、水文资料等,探索多时效、高精度水陆一体化数字产品在三维可视化、自然资源调查与监测、应急保障等方面的应用与服务。
1 水上水下一体化总体流程
通过进行水下多波束、单波束数据采集及数据处理、机载LiDAR 点云数据获取与处理、机载倾斜摄影数据获取及建设实景三维模型,水上水下多源数据无缝接边处理,水上水下多源数据融合处理、水上水下一体化数据融合与应用,形成水上水下一体化测量技术体系。其总体流程图如图1所示。
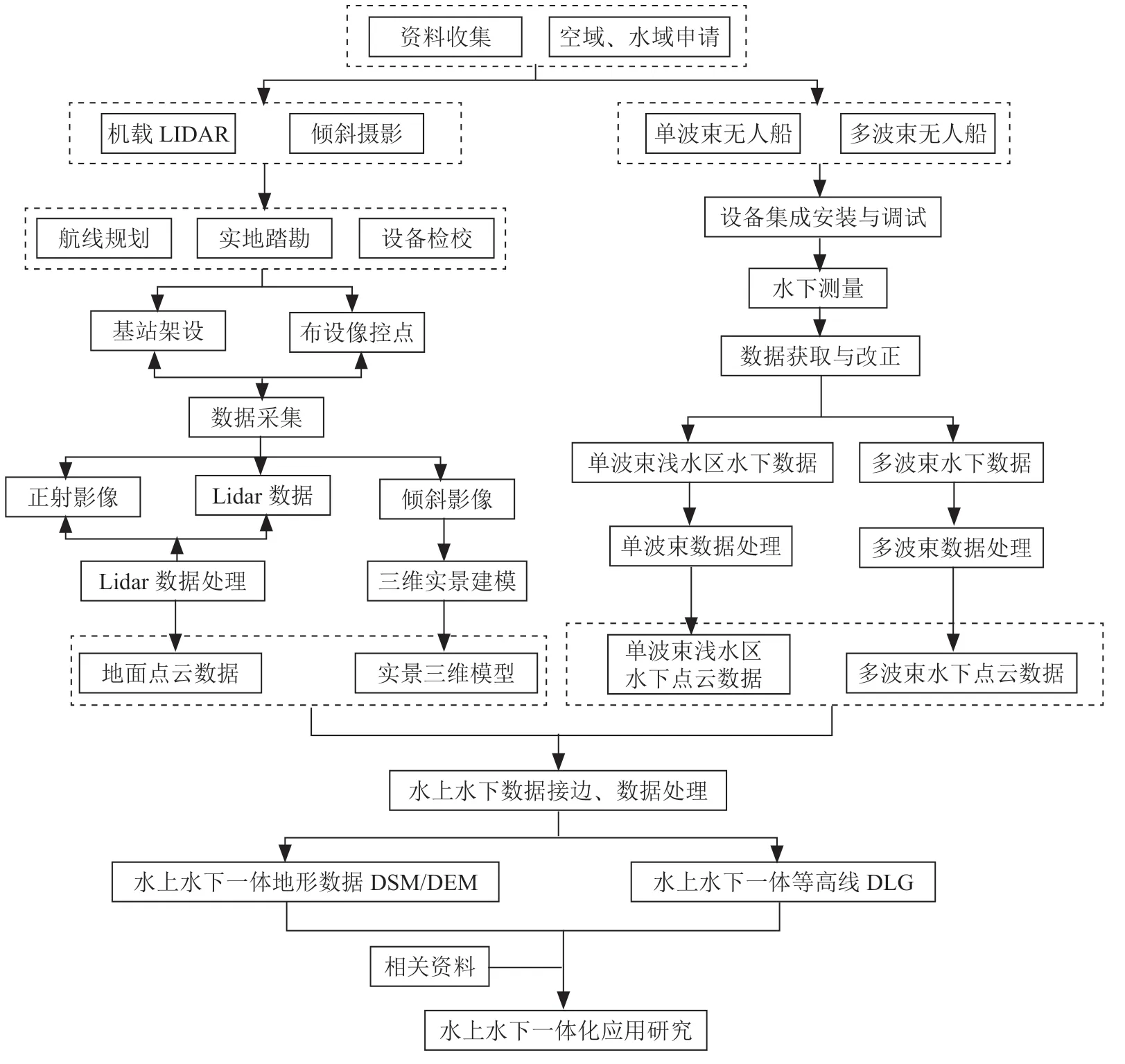
图1 水上水下一体化总体流程图
2 新型水下数据采集设备
水下数据采集使用的多波束无人船,搭载具有高集成性的高频多波束测深仪、GNSS 接收机、集成甲板单元、工控机等装置进行水下测量,相较于传统多波束测量设备具有吃水浅、适航能力强、智能化程度高等特性,模块化的无人船平台,安装拆卸便捷,大幅度提高了现场工作效率;可根据布设航线自主采集测区水下地形数据,实时回传,数据精度满足要求,且保障作业人员安全。多波束无人船及潜水区补测使用的单波束无人船的主要模块、功能如表1所示。
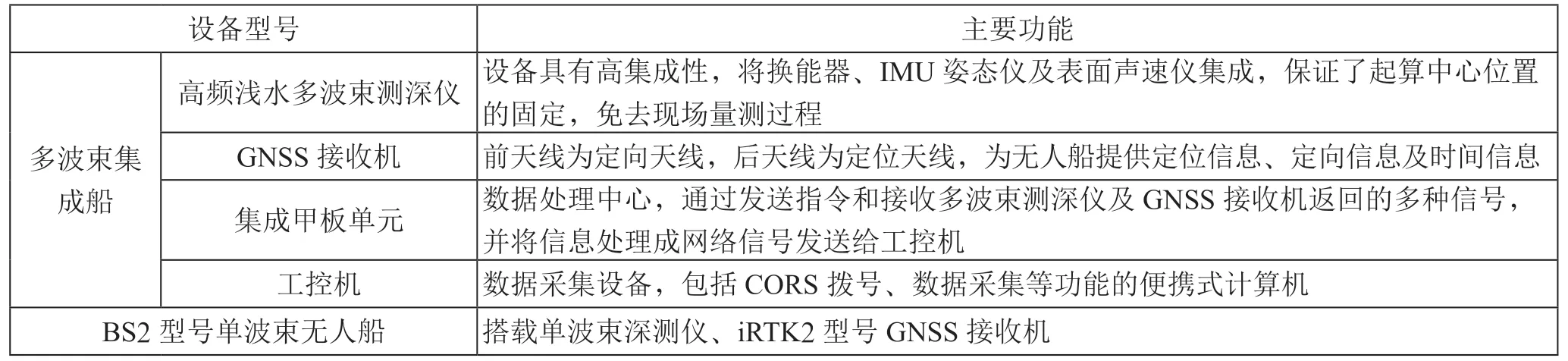
表1 单、多波束无人船主要模块及功能表
3 多波束水下数据采集与数据处理
3.1 踏勘、确定控制方式
实地踏勘,根据实际情况确定使用多波束无人船作为测试载具,确认作业区范围,使用单波束无人船、RTK、轨迹记录仪,沿着作业区外围巡视一圈,获得作业区平面范围后,在范围内布设测线。无人船在作业过程中利用动态RTK 模式,使用RTK 模式差分GNSS 接收设备登录CORS 账号即可开始作业,实时获取位置信息。
3.2 仪器检验及校准
在开展数据采集之前,设备安装并检查数据通信是否正常,时钟是否同步,声呐发收信号是否正常,根据异常显示及时进行调试;调试完毕后下水进行主要性能指标测试与检核,根据实测的水底地形找到合适的校准场进行多波束校准,布设校准线,完成首摇、纵摇、横摇的校准数据采集,利用声速剖面仪记录的声速及深度数据进行声速改正。
3.3 水下数据采集
根据水域实际情况进行手动操作多波束无人船采集数据,如图2所示。通过调节输出频率、波长、发射功率、发射开角等系数使采集数据最优化,根据探测布设的测线进行数据采集,采集过程中航线尽量与测线一致,航线速度保持一致,当航行出一段测线尽头后才能停止该段数据的采集,航行至下一段测线外时开始下一段侧线数据采集,直至设置范围内所有侧线采集完毕。
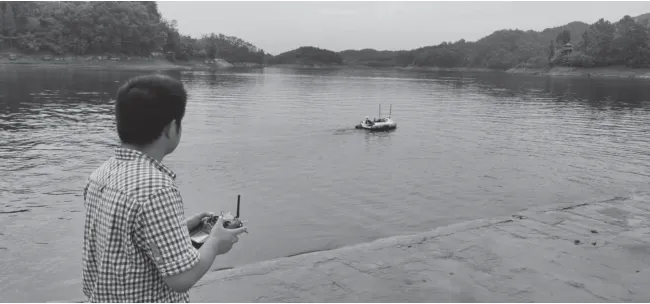
图2 操作多波束无人船进行水下数据采集
3.4 数据处理
使用HydroNavi 软件对水下数据进行两次滤波处理,并进行数据较准,逐条滤波,清除噪点,导出坐标系为WGS84 的点云数据,高程系统为大地高系统,通过坐标转换为CGCS2000 大地坐标系,通过似大地水准精化转换为1 985 正常高。
3.5 精度核验
在多波束测量中应布设至少一条检查线,检查线需跨越整个测区且与主测线正交,采用该检查测线进行多波束测量数据的精度检验及精度分析。此方法可以评估多波束测量数据的各项误差,包括传感器的安装误差、水位校正误差、声速校正误差、校准误差等,保证多波束数据精度达到标准。
4 浅水空白区补测
针对内陆水域浅水区实际情况,因多波束探测器吃水较深而产生探测空白区问题,本文提出采用多波束侧扫的方式及单波束无人船垂直岸边扫描的方式进行补测。
本文采取无人船多波束侧扫方法,来对浅水空白区域进行补测。多波束侧扫试验依旧需要进行侧扫设备安装调试、较准和数据获取作业环节,使用定制的转接头使多波束探头向船身垂直转动30°,由于扫描数据是依照多波束发射Ping 所排列的扫描序列图像转换而来,如图3所示,若探头倾斜角度大于30°,会引起斜距变形、目标距离变形等,导致探测数据质量不达标。通过测试发现,针对内陆水域地形倾斜较大区域能够弥补,但在内陆水域坡度平缓的浅水区域,由于多波束探头吃水有一定深度以及探头倾斜角度的影响,无法获取能满足精度要求的足够数据。
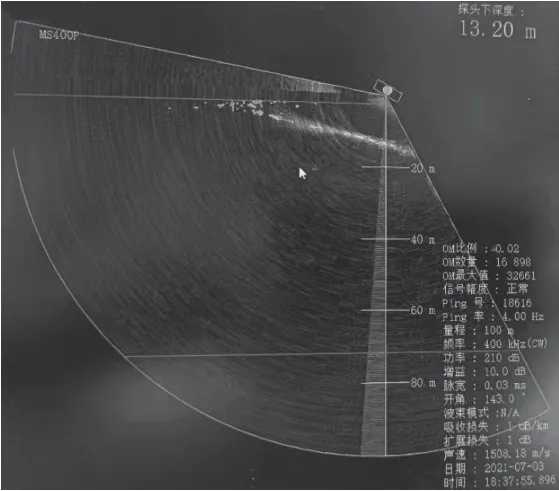
图3 倾斜30°多波束侧扫数据获取情况图
本文测试利用单波束无人船垂直于岸边折线往返的方式进行补测,单波束无人船声呐探头内置,吃水较浅,补测范围需同多波束探测范围有一定重合,并尽量保证单波束补测范围地形高差较小或平缓,补测线路如图4所示。所获得的垂直岸线的水下地形数据能够很好地拟合出平滑的等高线,减少空白区域地形数据内插编辑的工作量,提高数据的准确性,利用单波束无人船垂直岸线补测的方法能够很好地弥补内陆浅水区空白问题。
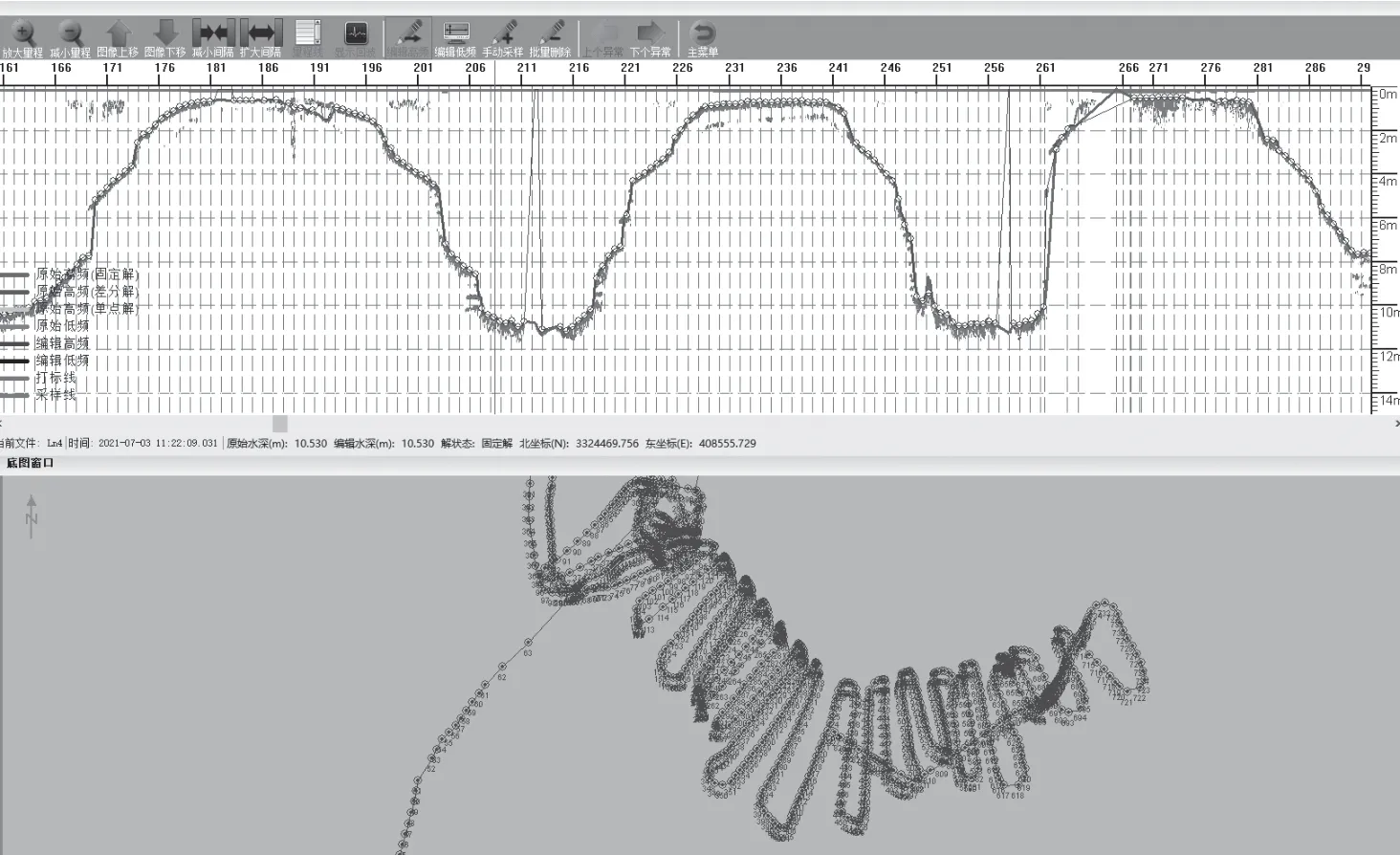
图4 单波束无人船浅水区补测路线图
5 水上数据获取和处理
基于多旋翼无人机携带机载激光雷达设备进行水上数据获取,完成八字校准后,根据设定航线完成机载激光雷达作业范围扫描工作。通过导入点云数据、地面站数据、POS 参数等在软件中进行点云滤波、点云关键点确定、点云配准、点云分割与分类、SLAM 图优化、目标识别检索、幻化检查、三维重建、点云数据管理等机载LiDAR 数据预处理工作。
使用五镜头倾斜数码航摄仪进行拍摄,保证下视影像分辨率优于0.1 m;并进行像片控制测量,利用GPS 连续运行跟踪站按网络RTK 方式测量,控制点的精度满足1:2 000地形图要求;基于航空影像及POS 数据,采用区域网方式进行空中三角测量,利用相片控制资料成果,在空三加密软件程序中开展控制点量测,进行平差解算;在实景三维建模软件中,经测区分块、像对筛选、点云计算、点云构网、纹理映射等制作实景三维模型。
6 水上水下一体化数据融合处理
将机载三维激光点云数据(las 格式)、单波束无人船补测数据(csv 格式)、多波束无人船扫测数据(xyz 格式)导入点云数据处理软件,进行多元点云数据融合处理。由于多源数据时空基准存在不一致,精度差异大的问题,需进行点云配准,形成无遮挡、无空洞、覆盖完整的统一点云数据。不同源数据存在密度不均匀,细节程度不一致的问题,需进行点云清洗及增强,形成尺度一致、多细节层级组织融合的数据。如图5侧视图及图6俯视图所示,多波束无人船测量的整个水下地形、单波束无人船对潜水空白区域进行补测、机载激光雷达设备获取的地表着色点云数据通过融合处理,形成精度统一、无缝的点云数据。

图5 多源点云数据融合无缝切面图
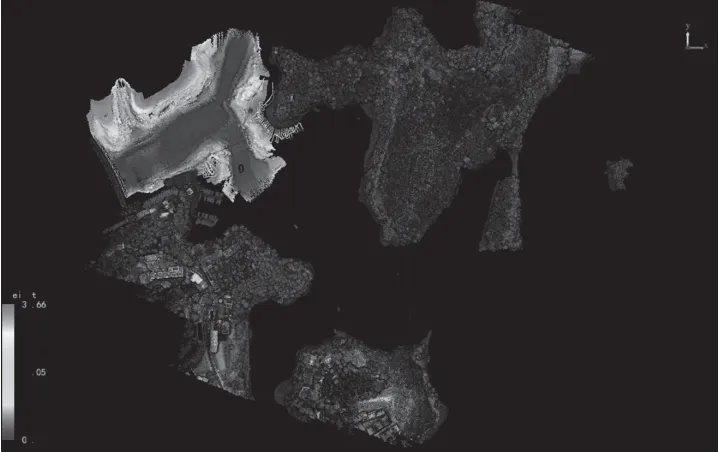
图6 多源点云数据融合俯视图
通过噪声滤波、按高程提取所需地面点、地面点分类、点云平滑、生成数字高程模型、生成等高线等数据处理方法,最终能够形成如图7所示的精度较高的水上水下一体化数字高程模型(DEM)、等高线(DLG)等一体化数字产品。

图7 水上水下一体化数字产品(DLG、DEM)
7 水上水下一体化数字产品应用
水上水下一体化数字产品在三维可视化展示平台支持实时在线的多种类查询、量测及分析,将基础测绘产品应用到更多环境场景中。本文利用Cesium 可视化仿真平台三维展示平台,支持水上水下多传感器获取不同类型的数据转换及发布,实现了用户在三维GIS 网络服务中对内陆水域数据范围三维实景模型的浏览、交互操作及扩展运用,使三维数字场景呈不同细节层次的展现。
在江河、湖泊、水库等内陆水域,获取不同时相的水上水下地形数据,在三维可视平台上对地形、断面的变化进行动态展示,并进行演变分析、水位演示等三维可视化表达;并能对水库库容、冲刷淤积量等难以精准获取的数据指标,通过水上水下一体化数字产品形成高程模型(DEM)并进行多期数据对比分析,实现对水下泥沙输移的定量分析计算及可视化分析。
8 结 论
本文提出利用多波束侧扫装置及单波束船补测的技术方案,消除多波束测深仪进行探测时所形成的浅水区数据无法获取的问题;提出利用点云数据处理软件,同时处理机载LiDAR 或倾斜摄影获取的地面点云数据及水下单、多波束测深仪获取的水下点云数据,构建水上水下一体化数字高程模型,形成水陆一体化无缝高精度数字产品;据此,本文提出测绘工作效率以及成果的准确性较高的内陆水域水上水下一体化工艺流程。
在未来,经济的快速发展及科技的持续进步推动着水下探测技术不断更新迭代。结合高精度位置服务及大数据分析等技术,更高效、精准的获取水上水下数据,生产高精度一体化三维数字产品,运用更多的行业数据资料,形成一套多时相、多尺度、多运用方案的数据库产品。在此基础上,更有效利用水上水下一体化高精度数字产品,结合水资源调查与监测、水资源保护、防洪等实际需求,开展水上水下三维可视化与GIS 空间分析的应用研究,提升自然资源信息化建设能力,为生态文明建设、数字中国建设提供更好的支撑。