机载雷达多任务多功能中心机设计
2022-08-29张雨轮
张雨轮
(西安电子工程研究所,陕西 西安 710100)
0 引 言
机载侦察雷达具有全天时、全天候的特点,不受昼夜、雨雾等天气的影响,在农业普查、地理测绘、灾害评估、军事侦察等领域均有广泛的应用。与传统光学传感器相比,具备探测距离远、不受地面自然遮挡物影响等优点。不同于普通的测距测向雷达,合成孔径雷达利用距离向脉冲压缩技术和方向合成孔径原理实现二维高分辨,实现对地面静止目标的高分辨率成像;通过和差测角和距离—多普勒效应,实现对地面运动目标的检测,可以大大提高雷达的信息获取和感知能力。
随着该领域技术的不断发展和逐步装备,合成孔径雷达成像、雷达动目标检测已逐渐成为机载侦查设备的一个功能模块。随着近年来不对称战争的发展,机载侦察雷达越来越多地被应用搭载在小型旋翼机、无人机上,完成战场态势感知,提供打击目标信息和提供毁伤效果评估等任务。而由于无人机技术和应用的不断普及,对机载侦察雷达的小型化和功能集成提出了更高的要求。
若沿用传统架构并使用单板机作为硬件平台,需要数据分发板+中心控制板+数据处理板+图像压缩板等多达3 ~4 块板卡硬件资源才能完成系统框架的搭建,难以满足体积重量和功耗的要求。机载雷达多任务多功能中心机就是在这个背景下开始研制并投入工程化应用。它采用结构小型化和功能一体化集成设计,采用FPGA +DSP 架构,进行尽可能大的系统集成和功能复用,通过一块标准3U 板卡实现硬件资源复用,除了具备雷达中心控制板的核心功能外,还具备动目标数据处理和SAR 图像压缩功能。
1 系统框架和任务分配
该系统设计之初有三个约束条件:实时性、机载轻量化设计以及高运算性能和多功能。
该机载雷达中心控制机,作为整个雷达系统的中枢,主要完成以下功能模块:工作模式管理、雷达时序控制、波束实时稳定、动目标数据处理、SAR 图像压缩、存储板控制、雷达内部数据路由、雷达对外通信。
如图1所示,中心控制机安装在雷达信号处理机箱内,对体积重量要求高,并且要求能够同时完成雷达控制,雷达数据处理和图像压缩,并集成雷达系统的数据流路由和存储回放控制功能。选用支持浮点运算的高性能低功耗DSP6678,辅之以325T 大容量可编程FPGA,以及必要的辅助电路,DDR3,Flash 芯片等,构成雷达中心控制机的硬件架构。FPGA 和DSP 间通过高速4X SRIO 高速串行接口互联,SRIO 单路通信速率为3.125 Gbps,能够满足DSP 和FPGA 间高速数据传输需求。FPGA 通过多路SRIO 接口实现与系统中与信号处理板、存储板、SAR后处理板及高速输出接口的通信。中心控制机对外的异步422 接口,包括飞控指令、伺服和惯导,同样通过FPGA逻辑实现。
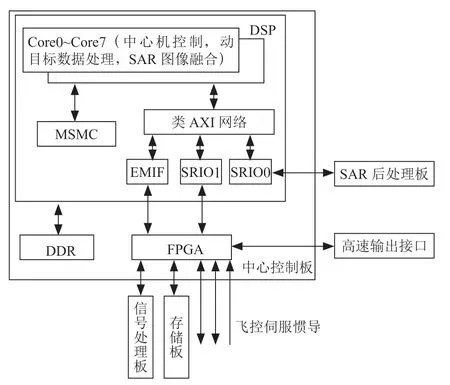
图1 系统任务和硬件资源规划
借助8 核DSP 的强大的运算性能和实时性,能够提供足够的运算资源完成雷达中心控制,动目标数据处理和SAR图像压缩等功能。DSP 内部运行基于SYSBOIS 多核实时操作系统,完成雷达内部核间通信和核内多任务调度。
DSP 的核0 为主控核,用于完成整个雷达任务调度。通过数据到来中断驱动的方式,完成雷达系统的工作模式管理、时序控制和波束稳定。通过和板内FPGA 的协同,核0 负责完成雷达系统的数据流分发。通过主动发起与核1 核2 的IPC 核间中断和消息,通知进行动目标数据处理和SAR 图像压缩。接收核1 和核2 的IPC 中断,将其处理完成的动目标数据和SAR 压缩图像进行转发。
DSP 的核1 负责雷达动目标数据处理。
DSP 的核2 负责雷达SAR 原始图像的JPG 压缩。
2 板卡框架和功能
中心控制机采用FPGA +DSP 架构,中心控制机设计的总思路是通过EMIF 接口完成低速接口通信;通过与FPGA之间的SRIO接口进行雷达内部和对外高速数据通信。
中心控制机内通过FPGA 与DSP 内的EMIF 接口,实现外部异步RS422 接口与DSP 之间的通信,传输的数据类型包括:载荷平台转发过来的飞控指令、载荷平台伺服码盘信息、机载光纤捷联惯导信息、存储板状态信息。
DSP 的核0 负责雷达工作模式管理、雷达时序控制、波束实时稳定,存储板控制。雷达上电自检后工作在空闲模式,并实时接收伺服码盘信息和机载光纤捷联惯导信息。通过EMIF 接口接收到有效的工作模式指令后,根据模式类型和探测距离等参数,解算出天线理想波束指向,计算雷达各分机工作参数,计算雷达时序控制参数;根据实时更新的机载光纤捷联惯导信息,通过坐标变换进行波束稳定,计算出在平台当前姿态下,需要发送给伺服和波束控制计算机实际的波束控制指向角。
DSP 的核0,把计算得到的伺服指令帧、时控指令帧以及各分机的控制指令等,打包通过与FPGA 的4X SRIO,下发到信号处理板的时控单元、伺服、频率综合器和接收器、波束控制计算机等雷达各分机,完成雷达控制机的任务下发。
DSP 的核0 还要响应飞控指令中的存储板控制命令。完成存储板的记录指令、回放指令、删除指令等。
DSP 的核0 运行在操作系统上,实现对多个任务的响应和处理。任务通过定时器中断及FPGA 发送的数据到来GPIO 中断触发。运行在DSP 核0 的任务主要有:飞控指令处理任务、伺服数据接收任务、惯导数据接收任务、CPI 中断任务、数处数据转发任务、存储板控制任务以及系统监控任务。另外,通过SRIO 门铃中断和核间IPC 中断,实现对SRIO 接口和其他核间事件的响应。
由于多个任务需要通过SRIO_1 进行数据传输,采用信号量互斥保证传输的可靠性。
sem_wait(&semSRIO_1_Occupy);
……//SRIO 发送函数
sem_post(&semSRIO_1_Occupy);
DSP 的核1 负责雷达动目标数据处理。动目标数据处理包括坐标变换、运动补偿、点迹凝聚、航迹相关、航迹更新、航迹滤波、航迹管理和航迹输出等功能。
DSP 的核2 负责SAR 原始图像的JPG 压缩。采用TI 提供的JPG 图像压缩库,能够高效地完成大幅宽SAR 图像的JPG 压缩。
6678 的8 个核可以通过MSMC(共享内存)或DDR3对数据进行访问和读写。因此对不同核之间数据通信时的cache 一致性维护尤为重要。实际应用中,要特别注意cache无效和cache 写回操作的运用,保证数据传输的正确性。
cacheWb:cache 写回的含义是将cache 中的数据写回到存储器如DDR。多核通信前,需要将需要传递的数据写回到MSMC 或DDR3 中,实现有效数据的更新。
cacheInv:cache 无效的含义是将cache 中的数据视为无效数据。当被无效的数据需要读写时,CPU 会重新将目标数据读取到cache 中操作,从而实现数据的更新。这样才能保证CPU 不会读到cache 中的脏数,而是MSMC 或DDR3中有效的数据。
所有DSP 与FPGA 之间的SRIO 数据交互都是通过DSP 的核0 调度的,核1 和核2 的处理发起和处理输出也是通过与核0 的核间IPC 中断。因此,DSP 的核0 是整个中心控制机的核心。
DSP 的核0 通过SRIO_0 与SAR 后处理板互联,用于进行SAR 后处理的数据交互。
3 控制数据流
3.1 板内
如图2所示,中心控制机内部的数据流主要集中在FPGA 和DSP 间的双向4X SRIO 通路上。从DSP 到FPGA的数据类型包括:时控指令帧、伺服控制指令帧、存储板指令帧和输出的动目标数据、输出的SAR 压缩图像、输出的SAR 后处理图像。从FPGA 到DSP 的数据类型包括:时控状态帧、动目标原始点迹、未压缩的SAR 图像。DSP 的SRIO_1 和FPGA 间通过地址映射,来实现不同类型数据的交换。

图2 中心机板内硬件模块组成和功能
3.2 对外接口
FPGA 负责接收载荷平台转发过来的飞控指令,机载惯导数据和载荷平台伺服码盘信息,并将DSP 生成的雷达系统工作状态和伺服指令码转发给载荷平台。
FPGA 与信号处理板通过SRIO 互联,用于接收后者发送过来的动目标原始点迹/未压缩SAR 图像数据;FPGA 与存储板通过SRIO 接口互联,用于SAR 图片、动目标输出数据、SAR 后处理图像的记录/回放数据通路;FPGA 与对外高速输出接口通过SRIO 接口互联,用于回放SAR 图片/SAR 后处理图片到高速输出接口。
4 系统实时工作流程
中心控制机接收飞控指令的SAR 模式/动目标模式任务,实时解算出时控参数并根据当前飞行姿态进行波束稳定,并下发时控参数和分机工作参数。时序启动后,中心控制机继续响应CPI 中断和惯导到来中断,实时更新并下发时控参数和分机工作参数。时序启动后,信号处理板进行动目标信号处理(或SAR 成像信号处理)。
中心控制机FPGA 通过SRIO 接口从信号处理板接收未压缩SAR 图像/动目标原始点迹,然后通过板内的4X SRIO接口转发给中心控制机DSP。中心控制机DSP 收到整幅图像后,通过板内IPC 核间中断通知图像压缩模块进行图像压缩(或收到动目标原始点迹后,通知动目标数据处理模块进行动目标数据处理)。中心控制机DSP 收到图像压缩完成(或动目标数据处理完成)IPC 核间中断后,将压缩后的SAR图像(或动目标输出数据)通过4X SRIO 回传给中心控制机FPGA,由中心控制机FPGA一路通过SRIO发送到存储板,一路通过SRIO 发送到高速对外接口。SAR/GMTI 实时工作流程如图3所示。
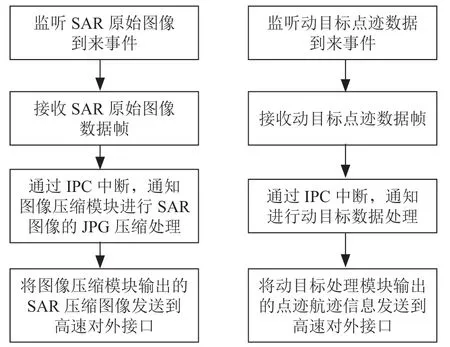
图3 SAR/GMTI 实时工作流程
5 成像结果
该机载侦查雷达进行了多个架次无人机挂飞实验,完成了多个分辨率合成孔径雷达成像和运动目标检测等科目的试验验证。整个过程中雷达工作稳定可靠,成像清晰,动目标建航稳定。实时录取的部分分辨率下合成孔径雷达成像图片如图4、图5所示。
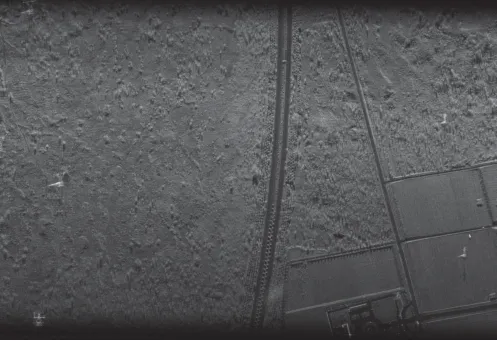
图4 SAR 0.2m 局部图
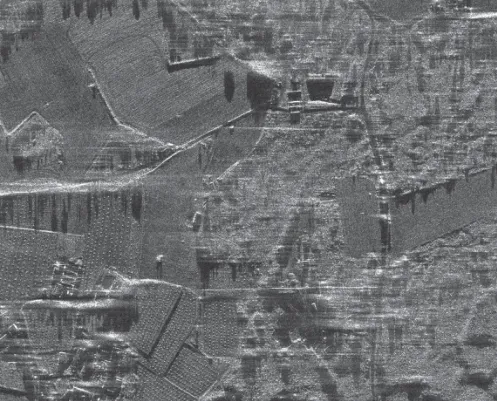
图5 SAR 0.5m 局部图
6 结 论
本文介绍了机载雷达多任务多功能中心机板的设计和实现,它采用标准3U 板卡VPX 设计,采用FPGA +DSP 设计框架,由DSP 完成雷达参数解算、系统控制、动目标数据处理和SAR图像压缩,由FPGA 和DSP 共同完成与雷达分系统及对外接口高速通信和数据路由。挂飞试验表明,该中心机板具备实时性强,可靠性、功能集成性高等优点,具备工程实用价值。