A Novel Tuning Method for Predictive Control of VAV Air Conditioning System Based on Machine Learning and Improved PSO
2022-08-28NingHeKunXiMengruiZhangShangLi
Ning He, Kun Xi, Mengrui Zhang, Shang Li
Abstract: The variable air volume (VAV) air conditioning system is with strong coupling and large time delay, for which model predictive control (MPC) is normally used to pursue performance improvement. Aiming at the difficulty of the parameter selection of VAV MPC controller which is difficult to make the system have a desired response, a novel tuning method based on machine learning and improved particle swarm optimization (PSO) is proposed. In this method, the relationship between MPC controller parameters and time domain performance indices is established via machine learning. Then the PSO is used to optimize MPC controller parameters to get better performance in terms of time domain indices. In addition, the PSO algorithm is further modified under the principle of population attenuation and event triggering to tune parameters of MPC and reduce the computation time of tuning method. Finally, the effectiveness of the proposed method is validated via a hardware-in-the-loop VAV system.
Keywords: model predictive control (MPC); parameter tuning; machine learning; improved particle swarm optimization (PSO)
1 Introduction
With the development of the economy, the problem of high energy consumption of building equipment has become increasingly prominent.The variable air volume (VAV) air conditioning system is an important part of the energy consumption of intelligent buildings, and therefore developing efficient automated control methods provide a promising way for saving energy. As a modern control method, model predictive control(MPC) has the advantages of strong robustness and dealing with multi-variable, strong coupling control problems, and has been considered to be an effective way to reduce the energy consumption of the VAV air conditioning system.
This work adopts the MPC control strategy for building heating systems, and the verification in the actual hardware-in-the-loop VAV system proves that the MPC control strategy has better energy saving effect than the traditional method in [1, 2]. In addition, it is found that in the MPC control strategy, different parameter selections will affect the system energy consumption level significantly. However, due to the lack of an explicit solution to the MPC control problem, it is difficult to tune parameters for achieving satisfactory performance efficiently. Traditionally,MPC parameters are tuned using the empirical knowledge of the controller performance factor.Furthermore, in [3], a method was proposed to minimize the tuning effort of nominal MPC,which extended the output tracking method of reference trajectory to the situation of region control and input target, thus allowing the output tracking performance to be tuned without modifying MPC tuning weights. In [4], an adaptive MPC robust tuning framework was proposed, which could optimize control performance indices of the system under the condition of model uncertainty. Simulation results showed that the improved MPC controller can suppress overshoot and smooth the input better than the traditional MPC controller. In [5], a multi-objective optimizer was proposed for multi-objective design of MPC (MOD-MPC) to tune MPC parameters, i.e., sampling time and prediction time to generate a set of optimal controller parameters. In [6], the evolutionary game theory was adopted to develop an adaptive tuning method for industrial MPC, and the set tests in an actual large-scale water supply network were carried out to show the advantages of the method. In [7], the authors studied the MPC tuning problem of an industrial crude distillation unit (CDU), and proposed an automated tuning approach based on the multi-objective optimization technique, to effectively adjust the weight of output error, the weight of input deviating from the target, and the weight of input moving. In[8], the authors proposed a systematic MPC tuning framework with an exploration-exploitation technique, which could significantly speed up the tuning process. In [9], the authors employed the constrained variant of Bayesian optimization to solve the MPC tuning problem, to directly handle noisy and expensive-to-evaluate objective functions.
Recently, the neural network has been applied in the field of parameter tuning of MPC by many scholars. A new predictive control method based on the neural network was proposed in [10]. The algorithm could not only meet the requirements of switching frequency and robustness, but also tune the appropriate weight factors online. In [11], the authors proposed an MPC-genetic algorithm (GA) framework based on attention neural network time series multivariate prediction model, which was applied to the tuning of MPC control parameters to better predict the regional temperature. The authors of[12] proposed an improved cost function and an online weighting factor automatic tuning method for modular multilevel converters. By introducing the control technology of the neural network predictor, the appropriate weight factor could be tuned effectively online.
However, as far as the authors’ knowledge,there is few research that focused on the MPC parameters tuning based on machine learning with time domain performance. Aiming at such a problem, a novel MPC tuning method is proposed in this work, and the main contributions are as follows:
1) A new MPC tuning framework is proposed, in which the relationship of MPC controller parameters and time domain performance indices is established via machine learning and then particle swarm optimization (PSO) is used to optimize MPC controller parameters to get better performance.
2) PSO algorithm is further modified under the principle of population attenuation and event-triggered update to reduce the computation time of the tuning method, and the effectiveness of the proposed method is proved by the hardware-in-the-loop VAV system.
Note that due to the complexity of VAV air conditioning systems (e.g., large time delay between input and output), the tuning of the MPC controller is normally achieved based on industrial experience or numerical verification as the impact of controller parameters on system performance is hard to characterize, and this may significantly restrict the performance of MPC controller. As machine learning technique could effectively characterize complex relationships between input and output pairs, it is adopted in this work to model the relationship between the tuning parameters and the performance indices,and as the machine learning model is normally implicit, PSO method is further utilized to build an effective method to obtain the specific parameters achieving the required performance. Furthermore, since PSO method may be time consuming for large scaled VAV systems, an improved PSO method utilizing population attenuation and event-triggered mechanism is proposed to save the computation resource of the MPC tuning algorithm without affecting the control accuracy. Note that according to the experimental results, the proposed method could effectively improve the performance of the VAV system, which also illustrates the aforementioned advantages of the method.
In Section 2, the principle of MPC is introduced and the problem of MPC parameter tuning is put forward. In the Section 3, the proposed parameter tuning framework is introduced.In Section 4, simulation experiments are carried out and the algorithm is verified on hardware-inthe-loop VAV platform. The Section 5 is the conclusion of this paper.
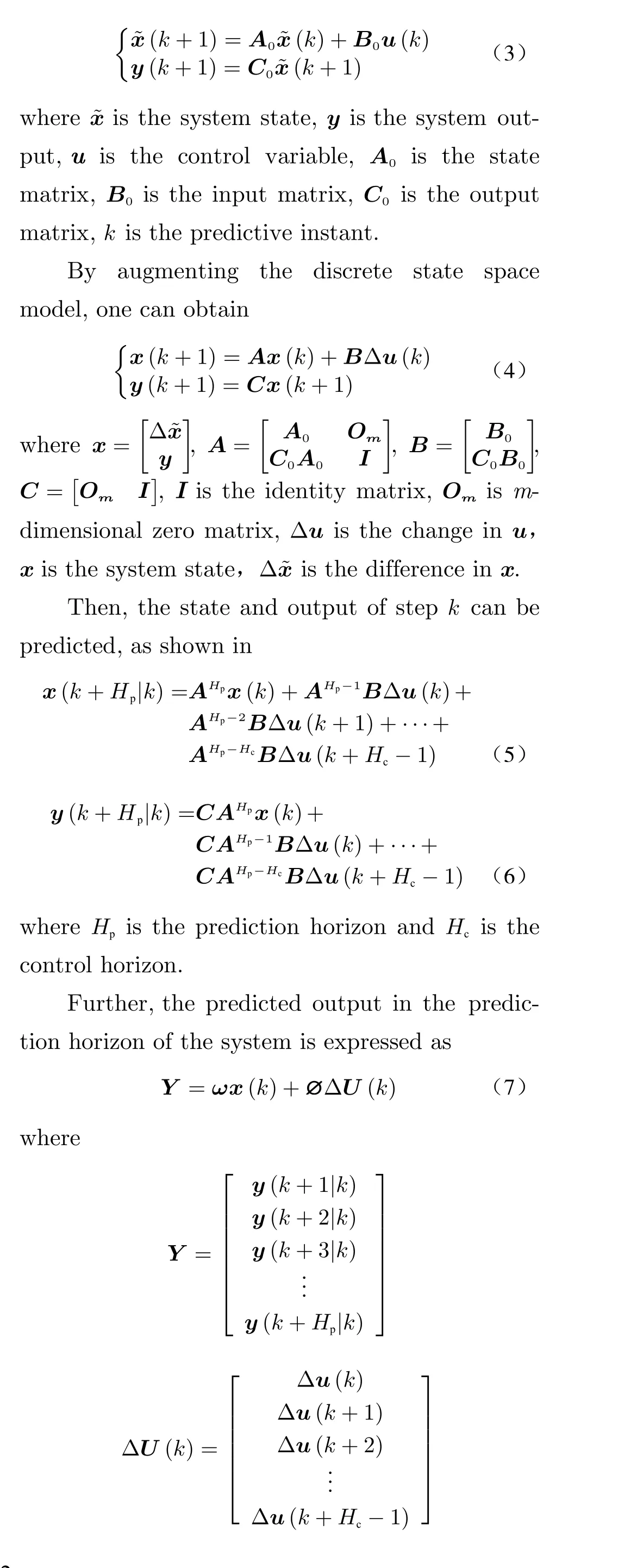
2 The Principle of MPC and Problem Formulation
Generally, for the VAV air conditioning system withn-dimensional input andm-dimensional output, its transfer function can be expressed as
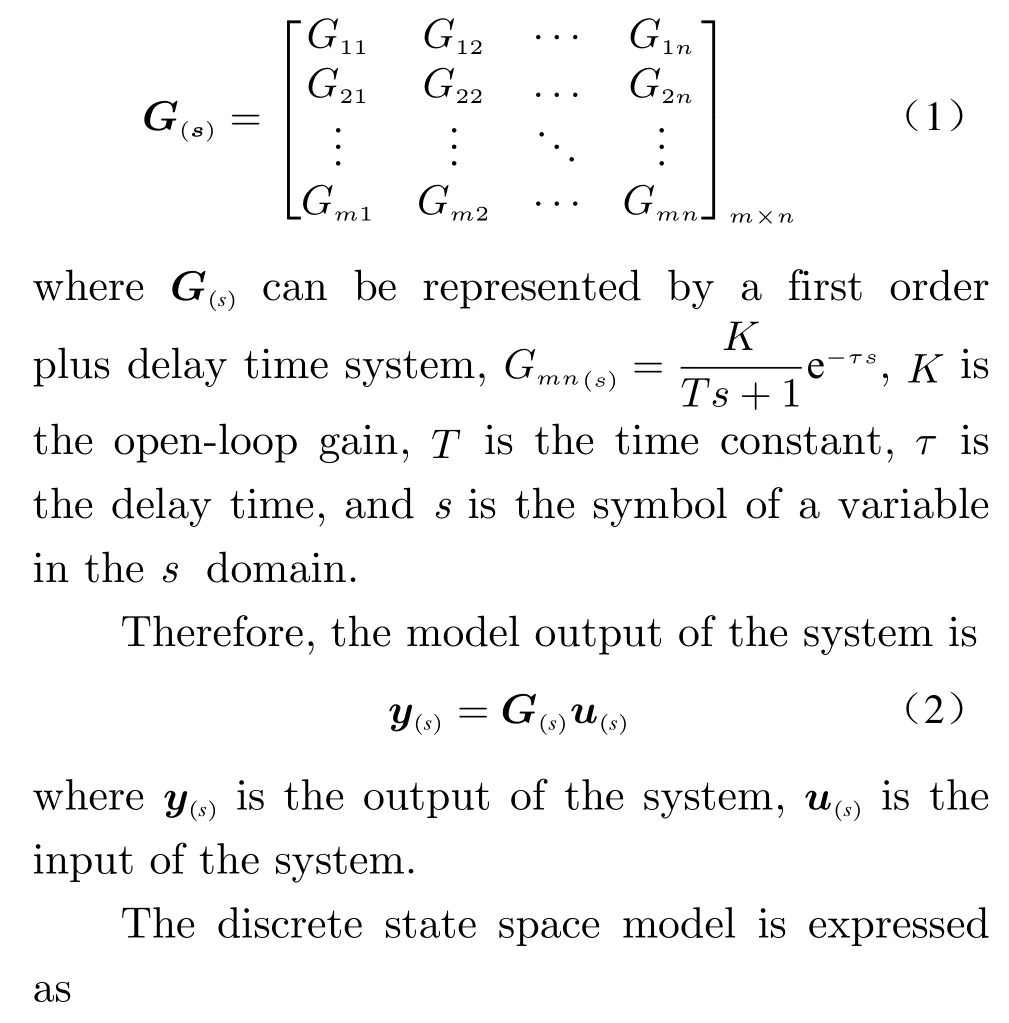
For the MPC, the time domain performance of the system is affected by the control parameters prominently. However, there is normally no explicit correspondence between the control parameters and the performance of the system response. Nowadays, the parameter tuning commonly used in industrial practice is mostly based on the empirical method, with certain contingency and blindness. Therefore, it is of great significance to develop a fast and effective predictive control parameter tuning method.
3 Parameter Tuning and Improved PSO Optimization
A novel parameter tuning method of MPC is proposed based on the neural network (NN) and an improved PSO in this section. Firstly, the relationship between control parameters and performance indices is mapped by the neural network.Secondly, PSO is used to optimize the control parameters. The tuning framework is shown in Fig.1.
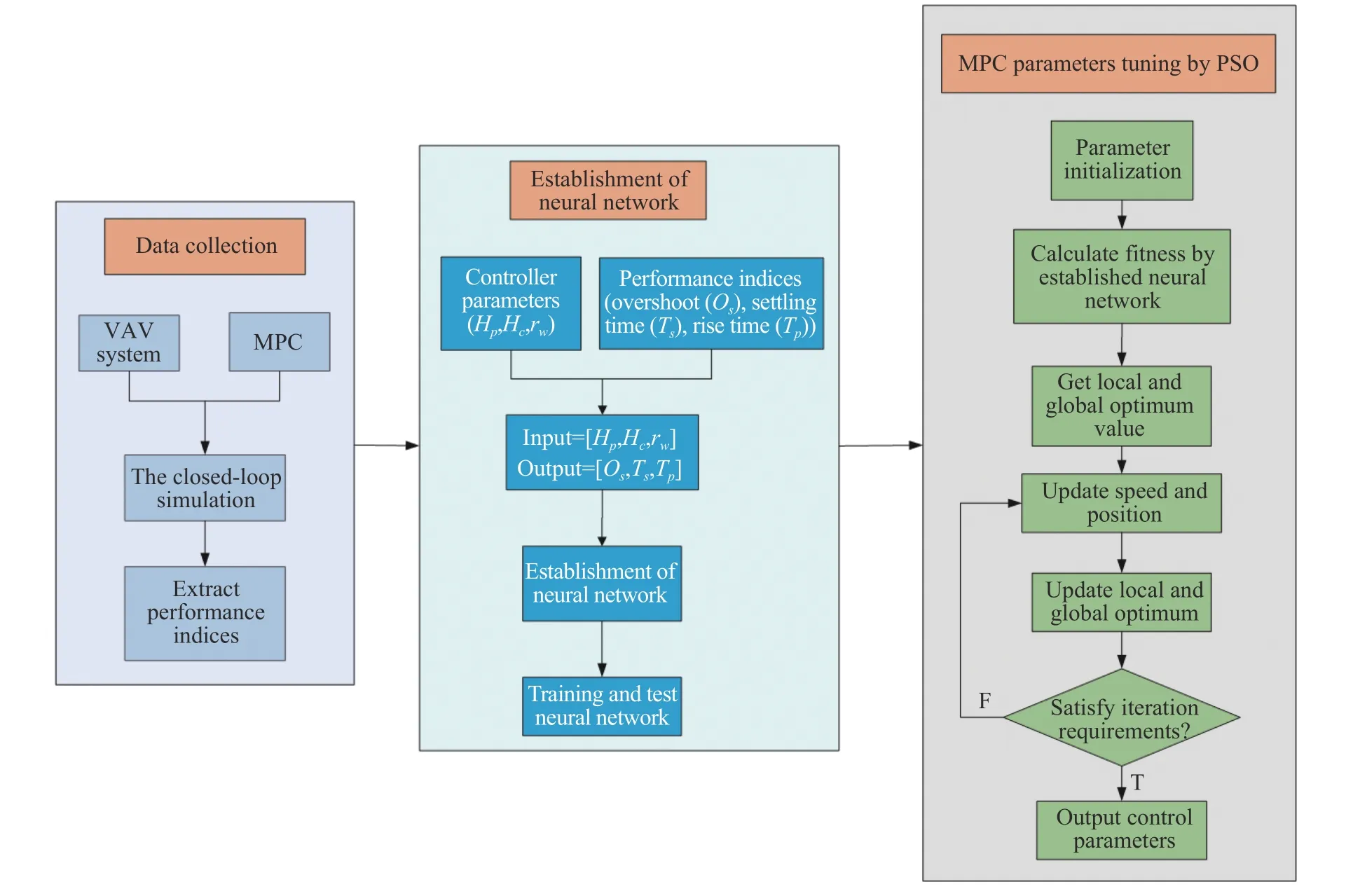
Fig. 1 The block diagram of MPC parameter tuning based on PSO
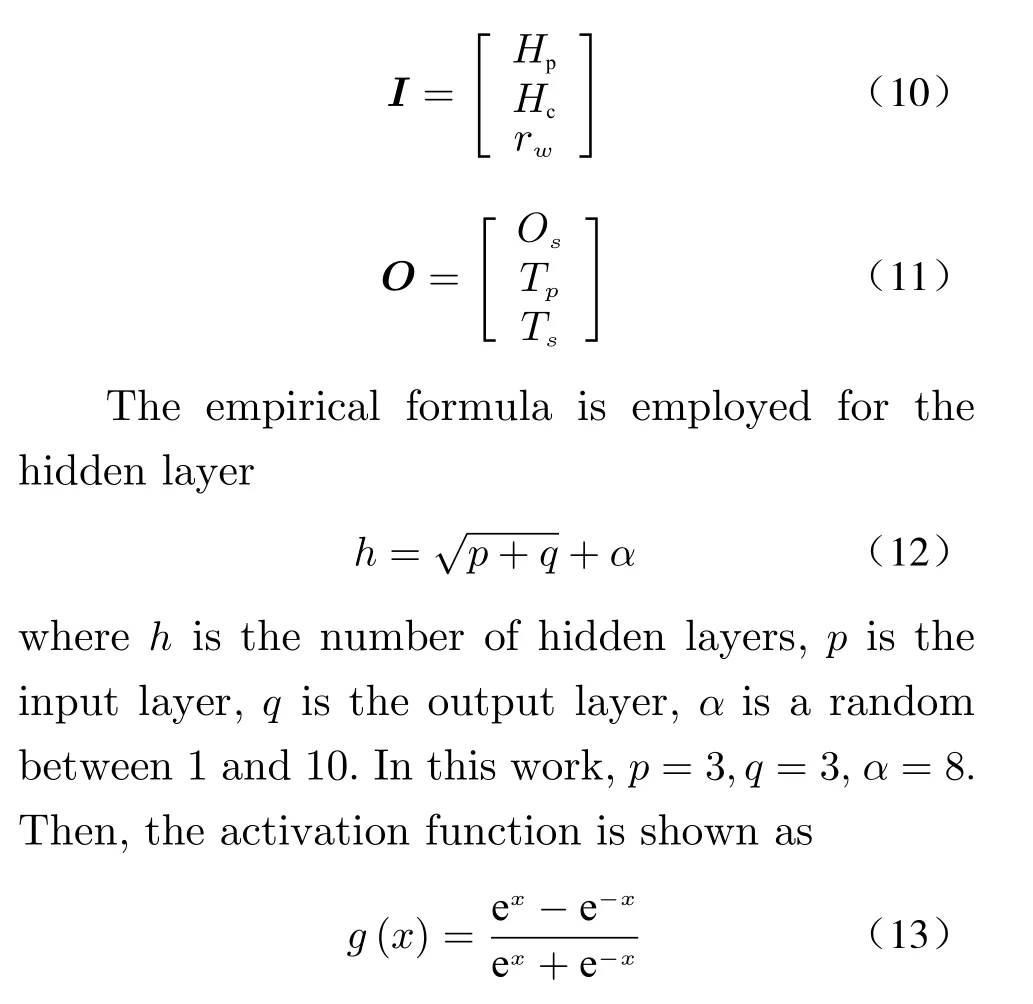
3.1 Establishment of neural network
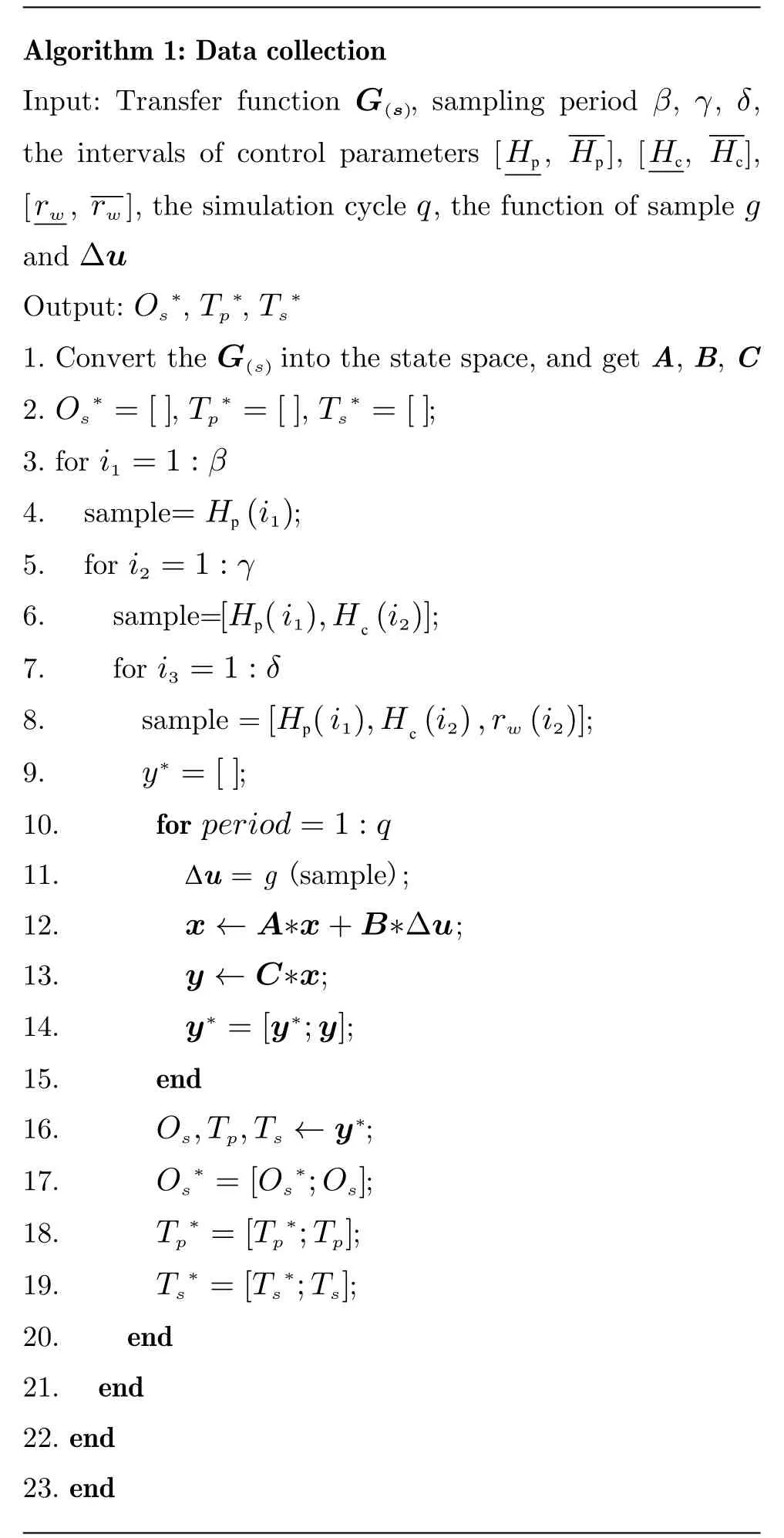
Algorithm 1: Data collection G(s) β γ δ Input: Transfer function , sampling period , , ,the intervals of control parameters [ , ], [ , ],[ , ], the simulation cycle , the function of sample and Os Hp Hp Hc Hc rw rw q g Δu* Tp Output: , ,* Ts*G(s)1. Convert the into the state space, and get A, B, C Os* =[ ]2. , , ;* =[ ]Tp* =[ ] Ts i1 =1:β 3. for=Hp(i1)4. sample ;i2 =1:γ 5. for[Hp(i1),Hc(i2)]6. sample= ;i3 =1:δ 7. for[Hp(i1),Hc(i2),rw(i2)]8. sample = ;y* =[]9. ;period=1:q 10. for 11. Δu = g (sample);x ←A*x+B*Δu 12. ;y ←C*x 13. ;y* =[y*;y]14. ;15. end Os,Tp,Ts ←y*16. ;Os*;Os]17. ;* =[Os*;Tp]18. ;Tp* =[Tp*;Ts]19. ;Ts* =[Ts 20. end 21. end 22. end 23. end

3.2 Parameter Tuning Objective Function of MPC
Based on the requirement of the actual practice,the objective function of MPC parameters tuning is determined as

3.3 Tuning Method Based on an Improved PSO
In this section, two improved PSO algorithms based on the principle of population attenuation are first developed, and the proposed MPC tuning method is introduced afterward.
3.3.1 PSO with Linear Attenuation of Particle Number
Algorithm 2: PSO with linear attenuation of particle number P NmaxNmin Input: , ,NT Output:T =1:P 1. for T >1 2. if NT =round(Nmax-(T -1)×Nmax-Nmin P-1 )3. ;4. else NT =Nmax 5. ;6. end 7. end
3.3.2 PSO with Linear Attenuation of Particle Number Based on Event Triggering
Note that there may exist a fatal shortcoming in the PSO with linear attenuation of particle number: when PSO falls into local optimum, it is difficult for PSO to jump out of local optimum when the number of particles continues to decrease.
Algorithm 3: MPC parameter tuning based on event triggered population attenuation PSO λ P NmaxNminNT ABCsim net HpHcrw[θ;δ]Input: , , , , , the VAV air conditioning system , , , is the simulation function, the established neural network , , , , constraint vector ,Output: tuned MPC control parameters c1 c2 w v x xminvmax vminxmaxxmin PNT 1. Initialize PSO parameters , , , , , , ,, ,, ;j =1:NT 2. for[Os;Tp;Ts]=sim(net,[Hp;Hc;rw])3.Os ≤θ Tp ≤δ 4. if and fit=Ts 5. ;
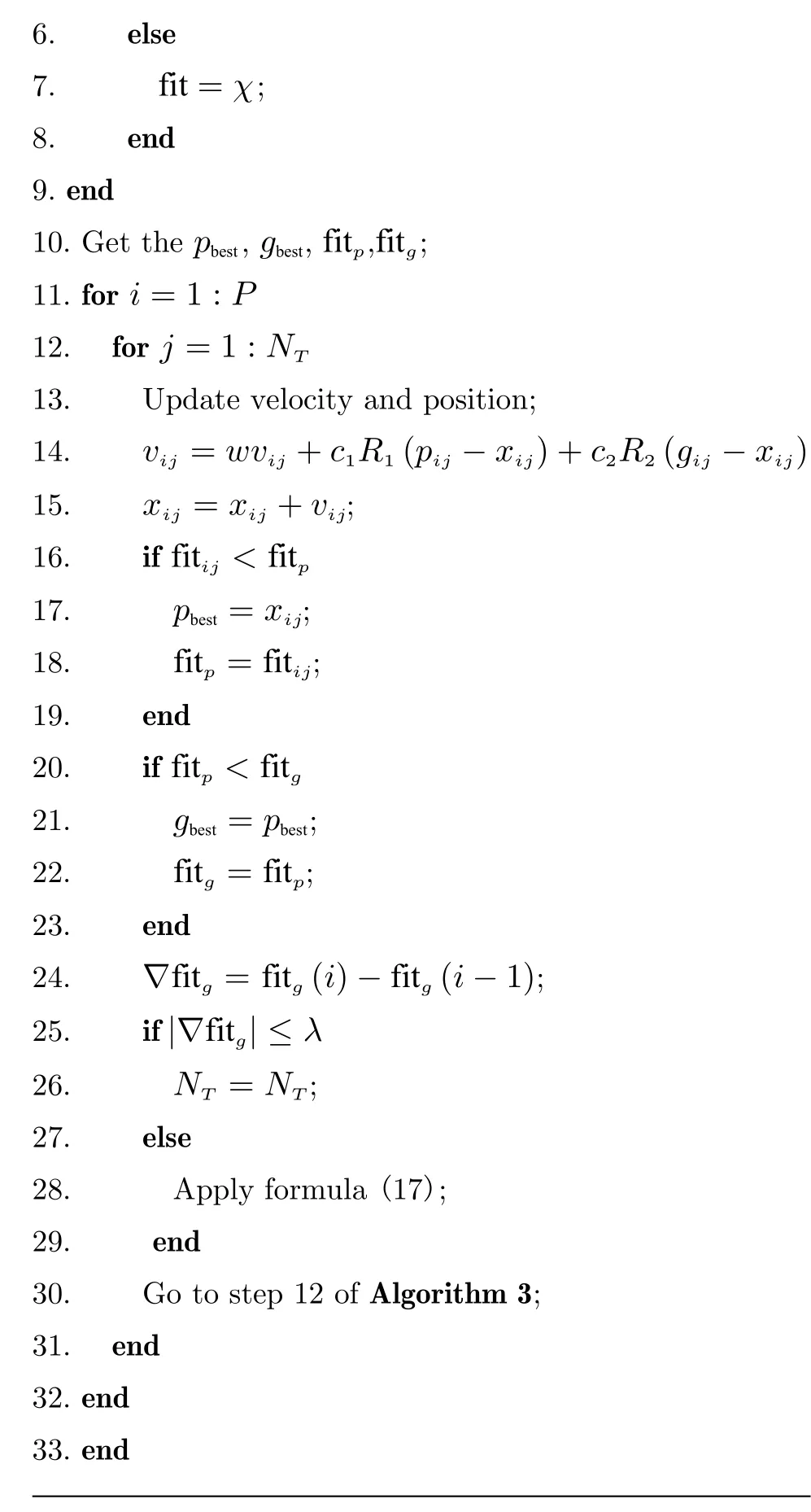
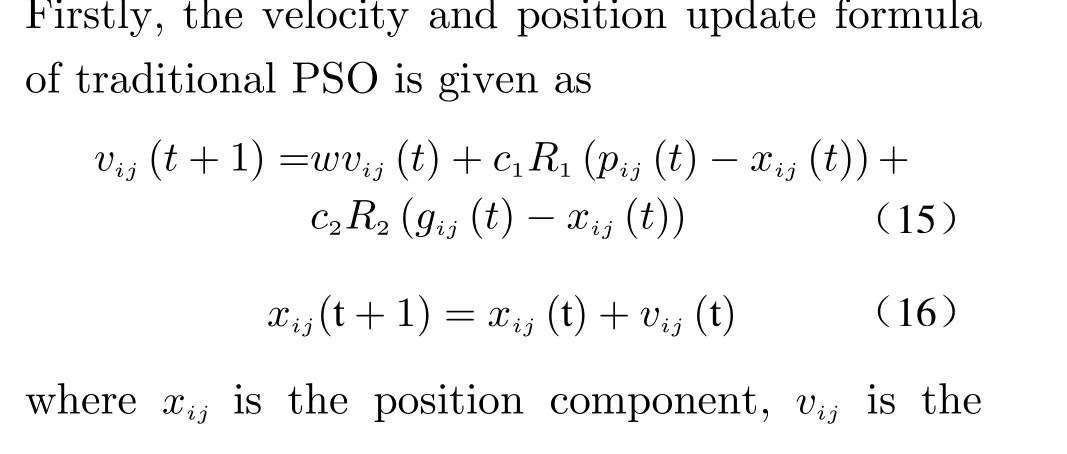
6. else fit=χ 7. ;8. end 9. end pbestgbestfitpfitg 10. Get the , , , ;i=1:P 11. for j =1:NT 12. for 13. Update velocity and position;vij =wvij +c1R1(pij -xij)+c2R2(gij -xij)14.xij =xij +vij 15. ;fitij <fitp 16. if pbest =xij 17. ;fitp =fitij 18. ;19. end fitp <fitg 20. if gbest =pbest 21. ;fitg =fitp 22. ;23. end∇fitg = fitg(i)-fitg(i-1)24. ;|∇fitg|≤λ 25. if NT =NT 26. ;27. else 28. Apply formula (17);29. end 30. Go to step 12 of Algorithm 3;31. end 32. end 33. end
Note thatpbestis the local best,gbestis the global best, fitpis the fitness of local best, fitgis the fitness of global best,χis a constant,vminandvmaxare the boundaries ofv,xminandxmaxare the boundaries ofx, fit is the fitness value.
4 Simulation and Experimental Verification
4.1 Simulation
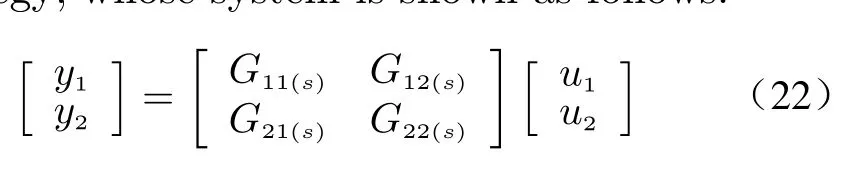
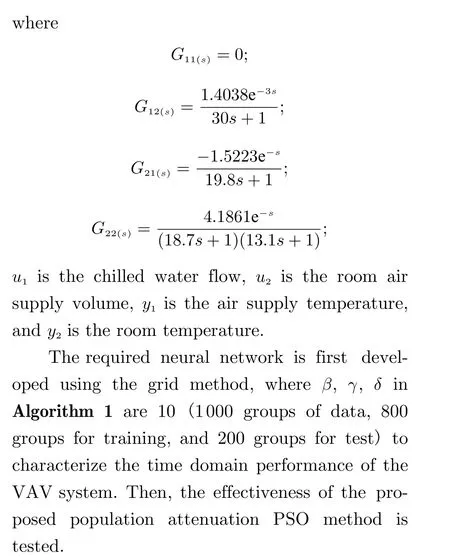
The VAV air conditioning system in [15] is adopted to verify the developed MPC control strategy, whose system is shown as follows:
In the process of PSO search, the changes of population number under different population decline mechanisms and the evolution process of fitness value are shown in Fig. 2 and Fig. 3.
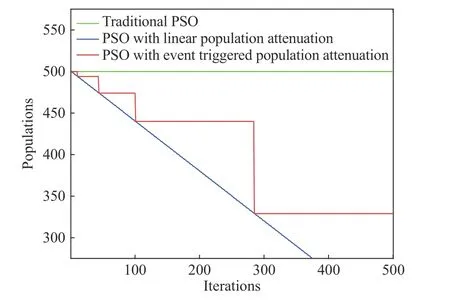
Fig. 2 Population map
It is observed from Fig. 2 and Fig. 3 that,the proposed event-triggered attenuation PSO method could achieve the best fitness value under the same iteration numbers, which illustrates the advantages of the event based update strategy.
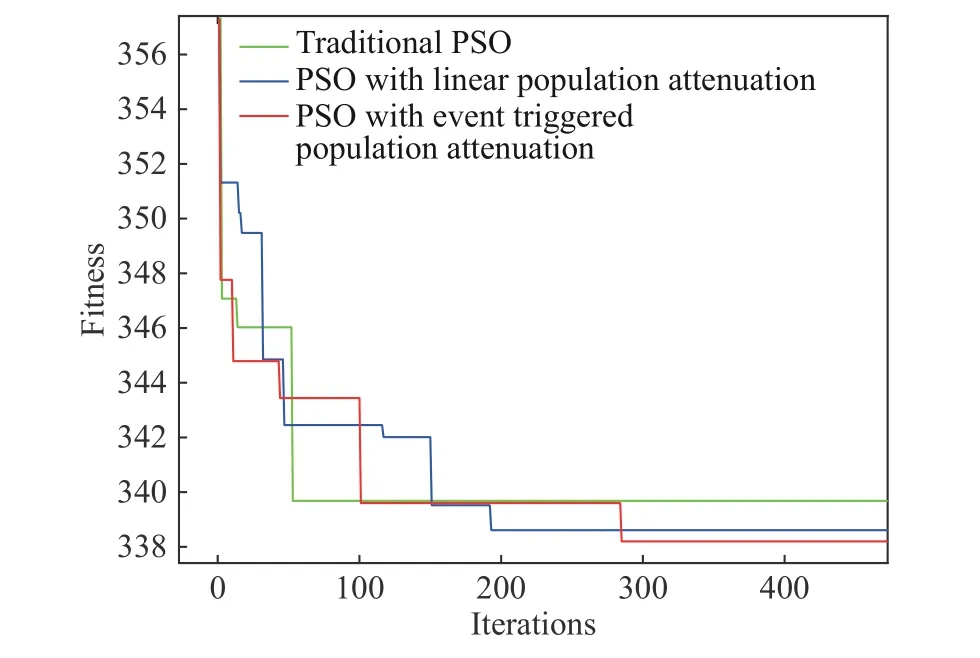
Fig. 3 The evolution process of fitness
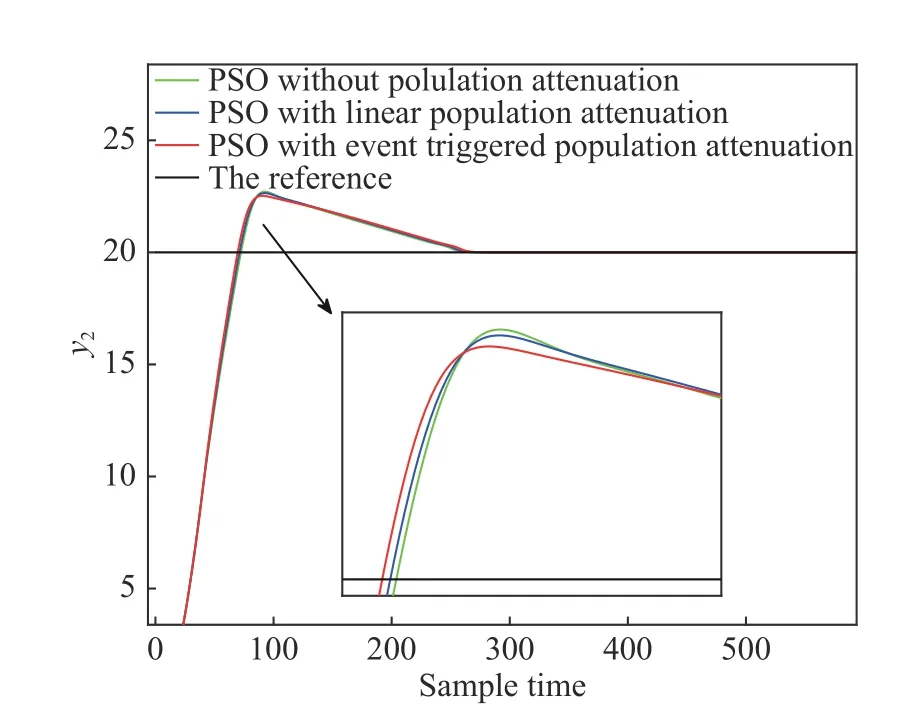
Fig. 5 The time domain performance of y2
More specifically, it is observed from Fig. 2 and Fig. 3 that, compared with the traditional PSO with a fixed population number, the proposed PSO methods reduce the size of the population with respect to search iterations, either linearly or piecewise linearly, to reduce the computation complexity of the searching algorithm.Meanwhile, given this improvement on efficiency,the fitness values of the developed PSO approaches have not been significantly affected,which, in fact, have been improved a bit, and this has effectively illustrated the advantage of the proposed methods.
Furthermore, the improved PSO method is employed in the proposed tuning algorithm to determine the controller parameters of the MPC for the considered VAV air conditioning system.The time domain response diagrams are shown in Fig. 4 and Fig. 5, and the comparison of optimization time is shown in Tab. 1.
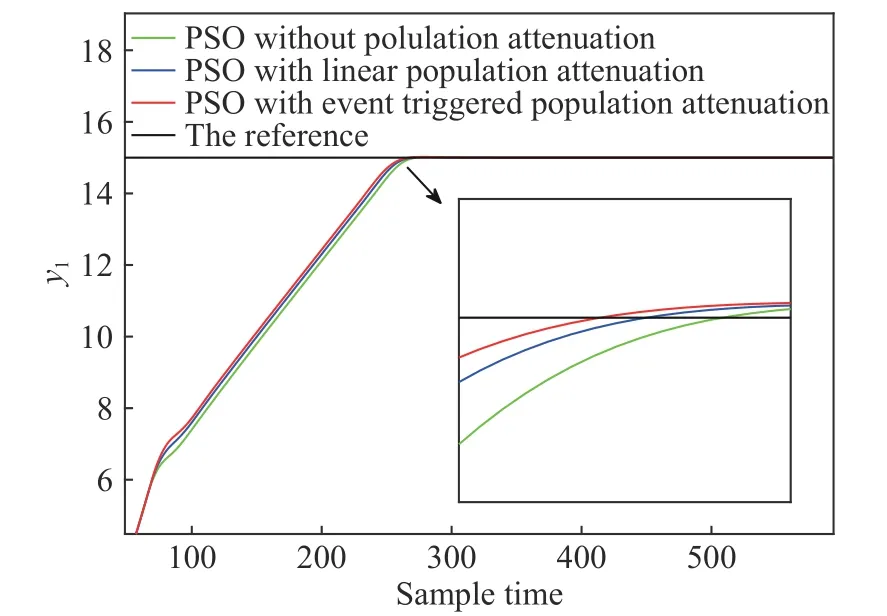
Fig. 4 The time domain performance of y1
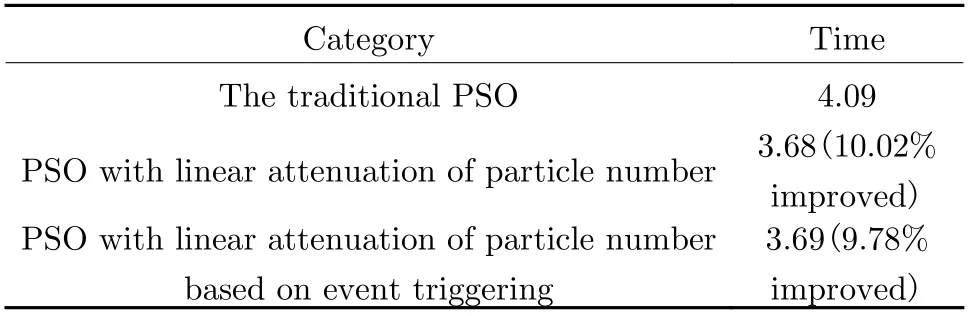
Tab. 1 The comparison of optimization time
It can be seen from the above figures that the time domain performance indices of the outputs (i.e., overshoot, rise time, settling time)from the three tuning strategies, namely, PSO,PSO with linear population attenuation and PSO with event triggered population attenuation are almost the same. Meanwhile, as PSO search is performed for multiple times in the MPC tuning,the proposed PSO methods with the population attenuation could further realize a 10.02% (linear approach) or 9.78% (event-triggered approach) reduction for the computation time, which has further shown the effectiveness of the methods.
4.2 Hardware-in-Loop Verification
In this section, the real-time hardware VAV system in loop real-time simulation test is performed to further illustrate the availability of the developed method. The hardware-in-the-loop VAV system (Fig. 6) and its configuration (Tab. 2)are as below.
It is worth noting that the structure of the considered hardware-in-the-loop real-time simulation experimental platform for VAV air conditioning system is of high reality and could effectively reflect the implantation environment of the MPC method. More specifically, the considered experimental platform is constructed following the structure of a real Johnson VAV air conditioning system [16]. All the utilized hardware and software are the same with those in real buildings. For example, Siemens Programmable Logic Controller (PLC) S7-1 200 is utilized as the controller and Object Linking and Embedding for Process Control (OPC) is employed for the transmission of the data, and a more detailed illustration of the platform is shown in Fig. 7.The adopted communication framework is given in Fig. 8. Where Y.y1a nd Y.y2 are outputs of the hardware-in-the-loop experimental platform,U.SP_u1 and U.SP_u2 are control quantities of the hardware-in-the-loop experimental platform.

Fig. 6 The hardware-in-the-loop VAV system platform
Besides, the commercial real-time simulator(Osimulator) could effectively reflect the dynamic and steady state characteristics of the control objective, namely, the VAV system. Furthermore, as the utilized real-time simulator has been verified through a number of real projects,e.g., Ningde times central air conditioning intelligent transformation project and energy consumption acquisition platform construction project ofUnited Petrochemical Industry, etc., it is believed that the accuracy of the platform is enough for the verification of a newly proposed method.
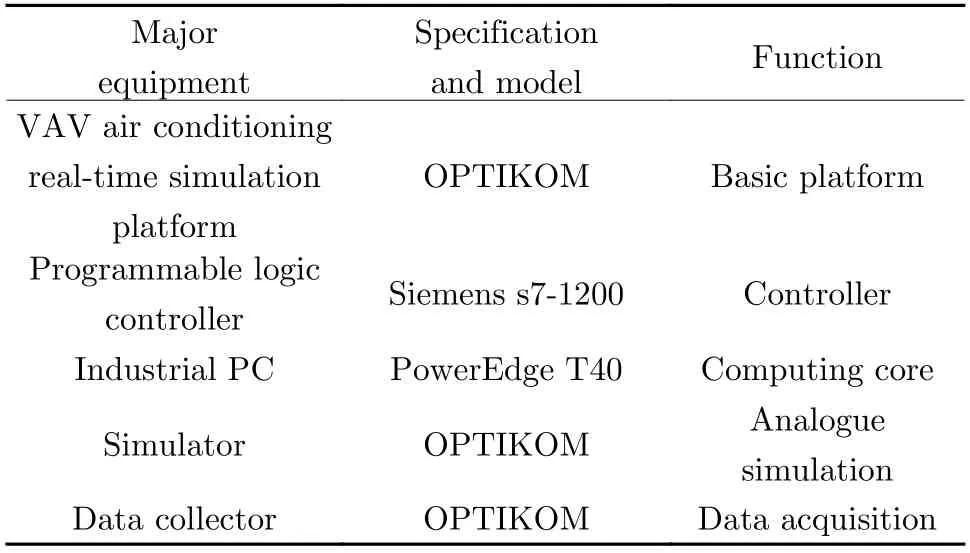
Tab. 2 Configuration of the hardware-in-the-loop VAV system simulator
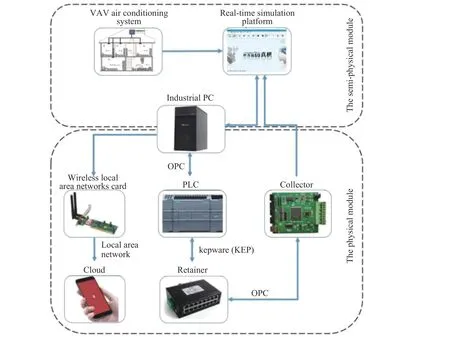
Fig. 7 Structure of the hardware-in-the-loop VAV system simulator
It is worthwhile mentioning that since hardware and software similar to a real VAV system are utilized in the test, the sampling strategy, as well as the implementation of the MPC algorithm is more close to its industrial application,but this also brings more difficulties to the proposed MPC algorithm. However, it is observed that the proposed algorithm is still able to guarantee the stability of the VAV air conditioning system, illustrating the effectiveness of the method.
Then, the algorithm proposed in this paper is applied to the control process of the configuration of the hardware-in-the-loop VAV system simulator as shown in Fig. 7. In order to make the experiment more convincing, we have further added external disturbances to the MPC controller, to see whether the proposed method could achieve strong robustness for the considered VAV system. The obtained results are provided in Fig. 9.
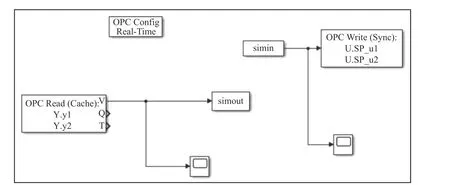
Fig. 8 The OPC communications of the hardware-in-the-loop experimental platform
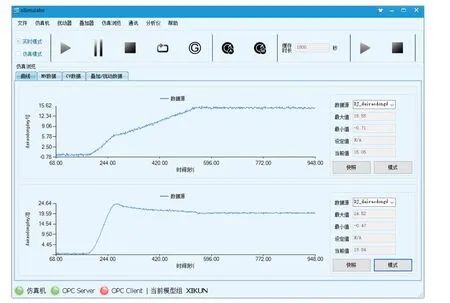
Fig. 9 Hardware-in-the-loop VAV system simulation
As can be seen from the figure, the output responses of the control process of the VAV system all reach the targets stably and robustly under the measurement noise, and the overshoots ofy1andy2were 3.6% and 22.6%, respectively, meeting the requirements of the VAV system, which has further verified the effectiveness of the method.
5 Conclusion
In this paper, an MPC parameter tuning algorithm based on improved PSO is proposed for VAV air conditioning system. Firstly, the relationship between control parameters of MPC and time domain performance indices is established by the neural network. Secondly, the controller parameters are tuned via PSO under the condition of satisfying time domain performance indice constraints. Then, aiming at the deficiency of large computation burden of the traditional PSO,PSO with linear and event-triggered attenuation of particle number, is proposed and utilized in the MPC tuning. Simulation shows that given the similar time domain performance, the optimization time of the improved PSO is shortened by 9.78% compared with the traditional PSO.Finally, a hardware-in-the-loop real-time VAV system simulation platform is used to verify the algorithm, proving that the control system with the controller parameters tuned by our proposed algorithm has strong robustness.
杂志排行

Journal of Beijing Institute of Technology的其它文章
- Decision-Making Models Based on Meta-Reinforcement Learning for Intelligent Vehicles at Urban Intersections
- Remaining Useful Life Estimation of Lithium-Ion Battery Based on Gaussian Mixture Ensemble Kalman Filter
- Prediction of Commuter Vehicle Demand Torque Based on Historical Speed Information
- A Causal Fusion Inference Method for Industrial Alarm Root Cause Analysis Based on Process Topology and Alarm Event Data
- Event-Triggered Moving Horizon Pose Estimation for Spacecraft Systems
- An Improved Repetitive Control Strategy for LCL Grid-Connected Inverter