次声信号处理软件设计与实现
2022-08-25刘守文王志峰杨立学
刘守文,王志峰,杨立学
(中国电子科技集团公司第三研究所,北京 100015)
0 引 言
次声信号处理系统由多个次声探测阵组成,每个次声台阵包含3~5个次声阵元[1]。次声探测阵的每个次声阵元通过中心站将原始数据及设备状态上传至次声信号处理软件进行处理。次声信号探测系统的组成如图1所示。

图1 次声信号处理系统组成
1 软件组成与功能
次声信号处理软件主要包括次声台阵参数配置、次声数据接收与存储、次声信号算法处理、数据综合展示、设备状态监控、数据库管理以及人工干预研判分析等模块,软件组成如图2所示。

图2 次声信号处理软件组成图
2 软件处理流程
次声信号处理软件的工作流程如图3所示。软件运行后,需登录和连接远端探测设备,设置各台站参数(如台阵编号、传感器灵敏度、数采转换因子等),连接成功后,软件将自动、实时地接收次声信号数据,并存储数据文件到磁盘中。软件针对实时数据流通过次声信号算法处理得到告警信息,告警信息一方面录入数据库,另一方面生成文字报。软件基于数据库可实现历史事件查询操作,通过远程操控操作可重启设备或进行远程数据下载。

图3 软件处理流程
3 软件模块设计实现
3.1 次声台阵参数配置
次声台阵参数配置模块的主要功能是对台阵的相关参数进行配置管理,主要包括台阵名称、台阵编码的配置及每个次声台阵下面次声设备IP地址及端口号等信息。软件通过XML配置文件的形式,对次声台阵参数进行快速存储和查询[2]。
参数配置的流程如图4所示。首先是默认(历史)参数显示,其次进行手动参数输入,软件对输入的参数进行合规判定,避免出现系统错误。如果参数设置违规,进行参数违规提示[3];如果参数设置合规,则进行内存参数更改,将设置的参数写入XML配置文件。最后进行参数设置成功提示。

图4 台阵参数配置流程
3.2 次声数据接收与存储
次声数据的实时接收采用可靠传输的TCP/IP协议,由每一个台阵的次声阵元独立的数据接收线程,实现可靠稳定的网络传输[4]。数据的实时接收流程如图5所示,主要包括网络数据接收、数据帧帧头查找、数据解析、数据校验和判定、数据显示和存储等阶段。

图5 数据接收流程图
3.3 设备状态监控
软件对探测设备的状态进行实时检测,判断探测设备的网络状态、设备电压、设备温度以及SD卡等是否正常。当设备状态产生异常,软件界面上相应的设备指示灯会发生闪烁并发出蜂鸣器报警,相应地会产生设备状态异常记录并更新至数据库[5]。
后期人员对设备的维护与记录也可相应地填写至设备状态维护数据库中。运行状态监控流程如图6所示。

图6 碰撞检测流程

图6 数据接收流程图
3.4 次声信号处理算法及实现
逐次多通道互相关(Progressive Multi-Channal-Correlation,PMCC)算法是一种有效的次声信号检测定向算法[6],利用了次声事件信号在不同通道的相干性。而噪声则不具备这一特性[7]。
作为一种基于相关的检测器,PMCC假设次声事件距离探测台阵足够远,因而可将次声波视为平面波[8]。平面波到达一个次声阵元相对于另一个次声阵元的时延,可利用两个台站测量到的次声信号间的互相关函数获得。对于一个由三个次声阵元i,j,k组成的次声台阵,它们之间的时延满足闭环关系,即:

式中:Δtij表示次声波到达第i个阵元和第j个阵元的时间差,Δtjk表示次声波到达第j个阵元和第k个阵元的时间差,Δtkj表示次声波到达第k个阵元和第i个阵元的时间差。
然而,在存在噪声的情况下,由于随机的组合互相关计算是不准确的,因而时延和可能不会正好等于0。对于包含N个次声阵元的台阵,定义其一致性为任意3个台站时延闭环和的平均值,即:

式中:rijk=Δtij+Δtjk+Δtkj。如果计算出的一致性小于设定的阈值(接近0的数值),则判定为次声事件。
在判定为次声事件后,可根据事件延迟估计出次声信号的方位角和声速。采用三角定位法,可确定平面上目标和子台阵中心的连线与正北方向的夹角,计算公式为

式中:θ为目标方位,(x1,y1),(x2,y2),(x3,y3)为三个台站的平面坐标,τ12为目标声到台站1和台站2的时间差,其他符号类似。速度可根据由角度确定的波程差除以时延得到。因此,与其他检测算法相比,PMCC算法除了能够检测出信号外,还能确定信号的方位角和传播速度。
算法运算流程如图7所示。首先,对多通道信号进行有一定重叠的短时窗划分,并通过带通滤波器组滤波;其次,以三点阵为基本单元计算平均的闭环时间差、方向角及速度;最后,对满足闭环时间差约束的时频单元按频率、事件、方向角及速度进行聚类,如果聚类得到多个簇,每个簇对应1个目标事件。每个事件信息包括到达时间估计、方位角估计以及视速度估计。

图7 PMCC算法流程图
图8和图9显示了1段长度为2 h的连续波形的PMCC检测结果。图8为每个时间-频率点的方位角分布,图9为每个时间-频率点的水平速度分布。图8和图9均包含6个“簇”,对应6个事件。

图8 PMCC检测方位角分布结果图

图9 实时波形显示

图9 PMCC检测水平速度分布结果图
4 试验验证
通过外场试验实时采集次声信号,实时信号波形显示界面如图10所示。将多个次声阵元的实时波形信息显示在同一个屏幕上,横轴为次声波形显示的时间戳,纵轴为次声波显示的幅度值,显示的时间长度可以调整,可以调整为1~5 min的显示时间宽度。软件在右侧显示监测的事件方向和波达时间。
设备状态分为网络状态和设备状态两个方面,采用指示灯的方式进行设备状态及网络状态的判定。当状态灯为红色,说明为“故障”;当状态灯为绿色,说明为“正常”。网络状态及设备状态下图10所示。
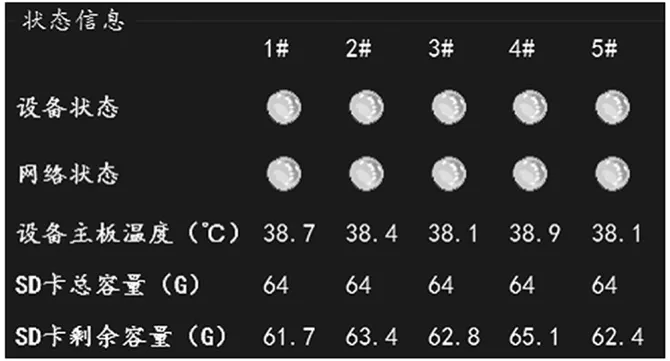
图10 网络状态及设备状态显示图
5 结 语
随着次声信号处理的应用越来越广泛,相应的次声信号处理软件的设计意义重大。本文结合目前的次声信号处理技术设计了次声信号处理软件,并通过软件进行了实际的信号接收和处理,有效验证了软件的功能和性能。