我是无人机小飞手
2022-08-25北京小飞手教育科技有限公司彭涛
北京小飞手教育科技有限公司/彭涛
对于常见的四旋翼无人机来说,其基础飞行姿态主要有前进后退、左右平移、旋转、滚转和自转几种。仔细观察还可发现,无人机运动时并不是简单的平面运动,如前后及左右移动时,机身会向着移动方向发生一定程度的倾斜。这是由无人机飞行特性决定的——旋翼类无人机是通过电机带动螺旋桨转动获得升力,在空中通过调节不同电机的转速来改变飞行姿态。本文重点讲解四旋翼无人机在上升下降、前进后退、左右平移及转向姿态时电机的转速变化。
一、垂直运动

做垂直运动时,无人机会保持在同一点位上升或下降。通常,同时增加4颗电机的输出功率,旋翼的转速增加、升力增大,无人机就会垂直上升。反之,同时减小4个电机的输出功率,旋翼的转速降低、升力减小,无人机便会垂直下降。若电机转速恰好满足螺旋桨的升力与整机重力相等,无人机则保持在空中悬停。当然,实际飞行时,无人机受环境因素的影响较大,单纯依靠人为操纵保持悬停的难度不小,因此其通常内置自驾仪等电子设备,通过芯片实时计算出合适的电机转速,以实现空中悬停的效果。
二、前进后退
无人机在悬停时可以进行前进后退移动(以机头朝向为前进)。飞行时,无人机通过调整相邻电机的输出功率,改变机头方向和机尾方向螺旋桨升力大小,进而实现移动。即无人机前进时机尾的2颗电机输出功率增大,机头的2颗电机输出功率减小。此时,机头处的升力力矩小于机尾处的升力力矩,使无人机被“推”向前。反之,当增大机头处的电机输出功率,减小机尾处的电机输出功率时,机头的升力力矩大于机尾的升力力矩,无人机被“拉”向后,实现后退飞行。

正是由于这种特殊的操纵方式,导致无人机的4颗螺旋桨一半升力降低而另一半升力提高,升力低的位置会低于升力高的位置,即看上去无人机在移动时会低头或抬头。因此,实际操纵时,也可以通过观察无人机的飞行姿态判断飞行方向——总是向着低头那一侧飞行。

向左平移的无人机
三、左右平移
无人机左右平移的原理与前进后退相似。若无人机左侧2颗电机的输出功率降低,右侧电机的输出功率增加,则向左侧平移飞行。反之,若无人机右侧电机输出功率降低,左侧电机功率增加,则向右平移。
四、滚转
四旋翼无人机的滚转比较特殊,其不再以机身中线为轴线转动,而是以其中一对电机臂为轴向转动。飞行时,保持其中一对对向的电机转速不变。同时,分别调整另一对对向的电机输出功率:一个电机输出功率降低,另一个电机输出功率增加。此时,无人机会向电机功率降低的一侧滚转。
五、自转
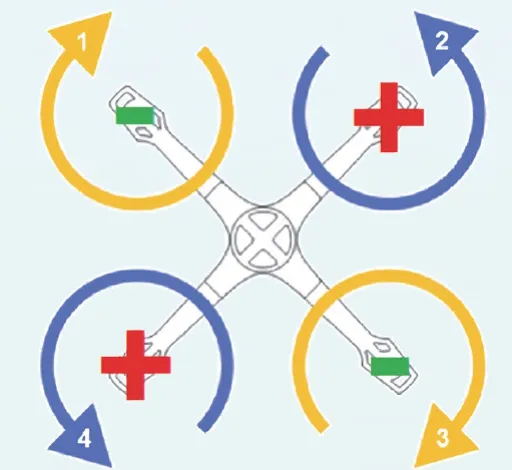
向右自转时无人机电机转速示意图
无人机自转时,可改变机头的朝向。需要说明的是,为了抵消螺旋桨旋转时产生的扭矩,其4片桨叶的转动方向并不相同,其中,对向的螺旋桨转动方向相同,而相邻的螺旋桨转动方向相反。
以右转为例,俯瞰无人机,其左上和右下的电机(顺时针转动)输出功率同时增加,右上和左下的电机(逆时针转动)输出功率同时减小。此时,逆时针转动的一组螺旋桨扭矩会大于顺时针转动的一组螺旋桨扭矩。在反扭矩的作用下,无人机开始顺时针转动,即右转。反之,减小顺时针转动螺旋桨的电机输出功率,增加逆时针转动螺旋桨的电机输出功率,在反扭矩的作用下,无人机开始逆时针转动,即左转。