风电塔筒油污清洗及无损检测机器人系统设计
2022-08-24刘海东赵子丰徐光平
徐 春,刘海东,赵子丰,徐光平
(1.大唐(赤峰)新能源有限公司,内蒙古赤峰 024000;2.北京中安吉泰科技有限公司,北京 100192)
0 引言
作为一种可再生的清洁能源,风能对缓解能源危机和减少碳排放总量有着重要作用,是清洁能源体系的核心组成部分,愈发受到世界各国的高度重视。风电机组作为将风能转化为电能的核心装备,其安全高效的运行是风电能源供应的有力保障。风电塔筒作为风电机组的核心关键部件,承担着主体支撑与应力承载的角色,对风电机组的可靠稳定运行起着至关重要的作用。但受自然界分布特点的影响,风电机组大多数安装在荒漠戈壁、高原山丘及沿海浅滩等环境恶劣地区,塔筒主体结构常年经受沙尘侵磨、雨雪霜冻及海水锈蚀等自然损害,轻则发生漆膜破损、腐蚀脱落,重则产生焊缝开裂、应力不均导致倒塔等情况,严重影响塔筒主体结构强度及风电机组的安全运行。因此需要定期针对风电塔筒等基础设备进行维护、检修及保养。
目前,针对风电塔筒的运维作业只有采用人工作业方式,即通过吊篮或蜘蛛人的形式,作业人员携带设备完成高空维护作业。由于风电塔筒近百米的高度,并且受到塔筒内部运输空间的限制,前期准备工作极为耗时,同时所携带的维护设备及原材料有限,存在着作业效率低下、工期长、成本高、工人安全无法保障等问题,无法满足我国风电行业日益增长的维护作业需求。针对目前传统人工作业存在的问题,亟需采用新型的作业方式,以保证安全、高效、可靠的塔筒维护作业。
目前,国内外已有公司和团队采用爬壁机器人作为载体搭载各类作业执行模块在石化储罐[1]、船舶外壁[2]、桥梁管道[3]等行业进行机械化运维作业[4]的尝试。针对风电运维,虽然也有一些国外的团队提出了设想的方案[5],但从具体的工程实施角度出发,仍然存在一些瓶颈。为此,从风电塔筒的实际运维需求出发,研制适用于风电塔筒的维护作业系统,是亟需解决的问题。
1 设计要求
风电塔筒不同与石化储罐或船舶外立面那种较为平整的金属立面,塔筒存在着曲率大、半径小的固有结构特性,同时结构高度也远高于一般的金属立面,这就为机械化运维作业提出了较为严苛的要求。故针对风电塔筒的固有结构特性,结合维护作业需求,对机器人维护作业系统提出以下设计要求。
(1)曲率适应。塔筒外形为圆锥曲面,最大直径4 m、最小直径2.4 m,传统的移动平台无法在曲面上转弯运动。为保证爬壁机器人在塔筒壁面的灵活运动,要求具备变曲率自适应能力。
(2)柔性接触。塔筒出场吊装之前会在表面涂装防腐保护涂层,爬壁机器人在表面吸附运动作业过程中不能破坏原本完好的涂层。因此,要求机器人与塔筒是柔性接触、避免漆膜的破损。
(3)油污清洗。塔筒表面存在质地浓厚的油污层,轻度清洁方式无法满足清洗效果,因此要求作业系统能够实现一定强度的持续性清洁作业。
(4)壁面检测。塔筒壁面存在大量的横纵焊缝,为保证检测结构的准确性,需要实现全方位、全截面覆盖的深度检测。
(5)操控系统。机器人搭载作业模块的方式能够替代人工进行高空高危作业,但机器人的操控系统要具备可靠高效安全的作业模式,能够在保障人员安全的情况下实现可靠高效的操控,同时让操作人员实施监测作业状态及塔筒作业环境。
为此,设计了以下机械化维护作业系统——永磁轮式爬壁机器人。
2 永磁轮式爬壁机器人
基于爬壁机器人工作现场工况调研,爬壁机器人选用四轮框架结构,以满足现场应用需求。机器人本体结构主要包括机器人箱体(内含驱动控制元器件)、前永磁轮驱动单元、后永磁轮万向从动单元、液体(清洗液/耦合液)喷洒模块以及摄像头等(图1)。

图1 机器人本体示意
(1)机器人箱体内置主要的驱动和控制元器件,以及相应的供电信号模块。
(2)前轮驱动单元。两个内置永磁体、结构相同的模块化前轮驱动单元设置于车架前端左右两侧,轮体外侧包裹橡胶,实现与塔筒壁面的柔性接触,同时橡胶接触能够增加摩擦力,主要用于提供机器人运动所需的驱动力及吸附力,通过实时伺服控制两轮速度(同速直行、差速转弯)实现机器人在壁面的灵活精准运动。
(3)后轮万向从动单元采用模块化设计,内置永磁体,设置于车架后端两侧,轮体外侧包裹橡胶。采用万向轮形式随车体随动,用于提供部分吸附力并实现车架在壁面的稳定支撑,同时利于四轮构型的转弯运动。
(4)液体喷洒模块由水箱、微型隔膜泵、走水管路以及集成在清洗/检测模块上的喷头构成。水箱分为3 组,分别挂载机器人两侧及背部,同时各自对应一个微型隔膜泵,主要存储用于清洗作业的清洗液或TOFD(超声波衍射时差法)检测作业时需要的耦合液。水箱总容量8 L,能够满足机器人清洗或检测时对清洗液或耦合液的需求。
(5)摄像头分为前后两组摄像头,前摄像头安置在前驱动轮前端,主要用于监测清洗/检测作业的实时状态,后摄像头安置在后万向从动轮后端,主要用于检测机器人尾部及拖拽线缆的情况。
考虑到塔筒壁面为锥体、曲率大且变化不唯一,在两个前置驱动轮与车体刚性固接的前提下,为了保证机器人对曲面的自适应能力,将两个后置万向轮与本体的连接方式设计为具有单个旋转自由度的柔性铰接方式。这样4 组磁轮在保持与壁面吸附的同时,后轮可以跟随壁面曲率变化与起伏,确保机器人在塔筒壁面运动的稳定与灵活(图2)。

图2 曲面适应
3 清洗检测维护作业模块
风机塔筒由于常年经受风沙侵蚀以及自身机舱零部件漏油的影响,塔筒外壁存在油污以及焊缝存在破损的情况,严重影响塔筒安全运行的可靠性,需要定期进行清洁检测等维护作业。
3.1 油污清洗模块
塔筒表面油污是在风电机舱漏油后,融合了沙尘等大气杂质,又经受强风吹蚀后形成的质地比较浓厚的污层,传统人工作业采用的滚刷擦洗的方式,针对质地较厚的顽固油层的清洗效率较低,因此需要设计一种能够配合机器人进行高效清洁作业的执行模块。
清洗模块机构为3 个旋转毛刷盘以一定角度排列构成,以便适应塔筒的曲率(图3)。每个刷盘由单独的电机驱动,刷盘上端独立的喷头与机器人本体的喷洒模块连接,当隔膜泵将清洗液喷洒在壁面之后,刷盘自转便可将壁面油污洗刷干净。
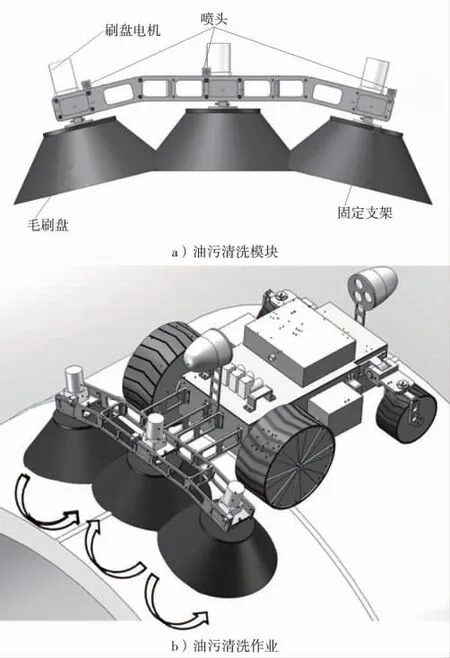
图3 塔筒油污清洗作业
清洗模块与机器人本体连接后,借助机器人灵活的运动能力以及清洗模块高效的回转扫刷模式,可以实现机械化清洗作业。刷盘直径400 mm,3 个刷盘的单次清洁面幅跨度能达到1020 mm,同时能够适应塔筒不同高度的曲率变化。
3.2 TOFD 检测模块
受限于吊篮或蜘蛛人等作业形式,传统的人工焊缝检测只能进行定点采样检测,无法做到高效的全域全覆盖检测。检测手段也只能采用电涡流等进行浅层扫描,无法对塔筒壁面及焊缝进行深层次的扫查。
TOFD 是Time Of Flight Diffraction 的缩写,即超声波衍射时差法,其检测模块由包含TOFD 扫查架(含超声探头)、用于与机器人相连接的安装架以及用于检测动作的电推缸构成(图4a)),它能对设定深度的母材及焊缝进行全截面的探查,同时将母材焊缝各深度层的不同缺陷同步显示在检测仪器上。
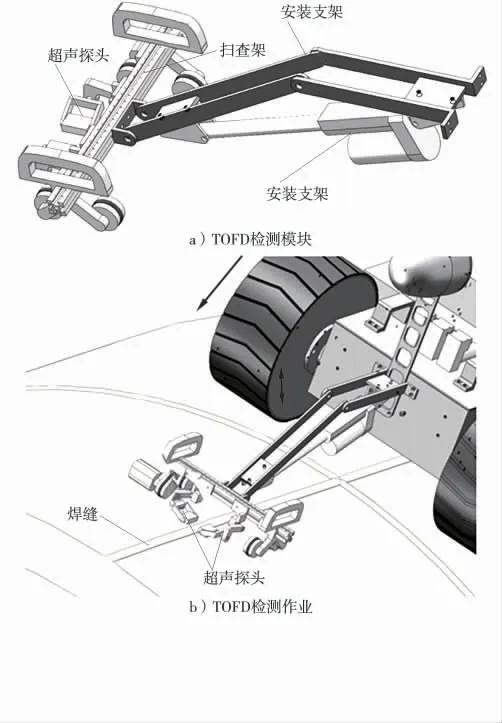
图4 焊缝TOFD 检测作业
塔筒焊缝包含有纵缝与环缝:纵缝为竖直方向,位置为沿塔筒圆周0°与180°对称布置;环缝为塔筒圆周方向,相邻环缝高度间隔2~3 m。在焊缝检测时,通过调整机器人的位置姿态以及利用电推缸调整扫查架的高度,将扫查架前端的两个超声探头分别置于焊缝的两侧,并紧密贴合壁面,将机器人本体的耦合液喷洒系统与探头上的喷孔连接,将耦合液喷洒至检测区域,控制机器人沿焊缝运动,即可实现实时的TOFD 超声焊缝检测作业(图4b))。检测数据可通过通信线缆传输至地面数据分析软件,为质检员提供实时的检测数据与分析结果,凭借机器人搭载TOFD检测模块实现高效、准确、全方位的焊缝无损检测作业。
4 控制系统
为保证机器人操作的可靠性以及人员安全,采用地面遥操作控制系统,即操作人员及控制系统主体均在地面安全区域内,通过有线拖缆的方式连接高空机器人作业系统,进行供电及控制信号的传递。控制系统包括主控制箱、无线遥控器以及相应供电信号线缆(图5)。

图5 控制系统
5 样机系统研制
为验证风电清洗检测机器人系统的设计可靠性,研制了系统样机(图6)。

图6 机器人系统样机
通过搭建试验测试平台,试验结果表明,机器人能够有效吸附在壁面上,在不打滑的情况下仍能搭载最多20 kg 的负载并进行机器人的性能测试。
通过测试,机器人空载的最大运动速度可达8 m/min,负载20 kg 时最大可达6 m/min。同时,为了配合清洗作业模块和检测作业模块的作业效果,作业时机器人的运动速度基本上保持在2 m/min。
后续的改进方向有两个:一是针对机器人本体的重量及尺寸进行优化,进一步进行轻量化设计,对部分结构体模块等构型进行小型化改进;二是在保证清洗/检测作业效果的前提下,磨合作业工艺参数,进一步提高作业效率。
6 结论
(1)根据风电塔筒的实际作业需求,明确了机器人及作业执行模块的设计要求,同时确定了相应模块的设计指标。
(2)根据设计要求进行机器人本体设计,采用双驱四磁轮的整体构型,配合曲面适应的万向从动结构,能够实现机器人在壁面的可靠吸附与灵活运动。
(3)针对不同作业场景需求,通过对传统人工作业的痛点分析,并考虑到作业效果及作业效率的问题,设计了油污清洗及TOFD 检测两种前端执行作业模块。
(4)考虑到人工操控机器人的便捷安全以及机器人作业的可靠性,采用本体有线拖缆及人工无线遥控的整体控制方案,在保证机器人本体供电及信号传输可靠的前提之下,无线遥操作提供了极大的便利及人员安全,能够满足风电现场高危的作业环形需求。
(5)通过各部分模块的系统集成,研制了系统样机,通过搭建测试平台验证了系统设计的准确性与可靠性,能够满足风机塔筒的现场作业需求。
