电厂人员作业安全管控系统的研究和应用
2022-08-19徐红武张栋景文林居亮樊玉平赵海月
徐红武,张栋,景文林,居亮,樊玉平,赵海月
(1.国电南京自动化股份有限公司,江苏 南京 210031;2.福建金湖电力有限公司,福建 三明 353300)
随着我国电力体制改革的不断推进,电厂大量的检修工作逐步由社会化的工程队承接,电厂作业人员不再是对本电厂设备环境非常熟悉的本厂技术人员,即便是对电厂十分了解的本厂运行人员,由于人为因素导致的电厂安全事故也时有发生。究其原因,主要还是由于电力系统设备本身比较复杂、设备操作流程各不相同、电厂作业人员自身疏忽大意等原因造成的。因此,如何利用技术手段,提升电厂安全管控水平,对“五防”、“两票”等系统形成有益的补充,成了电力行业安全领域技术研究人员的研究热点。文献[1]介绍了运用虚拟现实技术,通过模拟电力行业的真实运行检修环境以及高风险作业过程,给学员开展智能仿真培训和高风险检修作业的指导,增强对高风险操作规程的体验效果和提高学员安全技能水平,最终提升高风险作业的安全保障水平。文献[2]介绍了发电厂作业现场智能管控系统,但未就系统具体的开发技术做出明确的介绍。文献[3]介绍了瑟利模型理论在火电厂人因失误事故安全风险防控系统中的应用,仍未就系统具体的开发技术做出明确的介绍。文献[4]提出了基于ERP系统实现对电厂“两票”管理水平的提升,虽然可以部分解决某些安全隐患,但仍然不能完全杜绝无票作业、无监护人员作业和擅自扩大工作范围的违规现象。本文采用UWB人员定位技术、HTML5浏览器技术、webGL 3D渲染技术、人工智能视频流目标检测及分析技术,实现了电厂人员作业安全管控系统,用于及时发现电厂作业人员的违规行为并立即进行广播警示,实现对电厂作业人员进行全过程实时安全管控。
1 系统架构
本系统基于spring框架实现了web后端,基于angular框架实现了web前端,基于ionic、angular、cordova框架实现了手机app,基于webRTC技术实现了跨浏览器、低延迟的网页视频流实时播放,基于组件化编程的理念,html5、webGL技术实现了数字电厂二维三维融合展示,基于yolo、DeepSort框架实现了实时视频流中的人员目标检测、定位及追踪,基于UWB技术实现了作业人员的高精度定位及视频追踪,并且根据现场的具体需求情况,实现了两种定位技术的有效组合。
电厂人员安全管控系统由包含定位功能的安全帽、通信服务模块、分层分布式实时内存库、流媒体服务模块、高级应用模块、web服务模块、系统参数配置器、实时监控模块及手机app等部分组成。通信服务模块实时获取电厂作业人员安全帽的位置坐标信息,并把作业人员的实时位置信息写入到分层分布式实时内存库;流媒体服务模块专门负责处理视频流方面的信息,包括摄像机的接入、视频流转发及视频流web发布等功能;高级应用模块主要是基于对分层分布式内存库中电厂作业人员的实时位置信息实现人员超许可范围告警、人员疲劳作业告警、人员静止不对告警、无监护人员作业告警以及对实时视频流的分析实现人员未戴安全帽告警等功能;web服务模块实现人员作业安全管控系统的web发布功能;系统参数配置器实现摄像机参数配置、人员信息配置、广播告警配置及电力设备安全等级、安全区域的动态配置管理等;实时监控模块实时显示二维地图或三维场景中作业人员的实际位置、实时告警信息、历史告警信息查询、人员历史轨迹查询等。系统框架如图1所示。

图1 系统框架图
2 主要技术
2.1 基于卡尔曼滤波的位置纠正技术
电厂人员定位采用超宽带(Ultra-wide band,UWB)定位技术,虽然比其它定位技术的精度高,但由于多径传播效应,从安全帽获得的人员位置数据的精度仍然不够理想,采用有效的滤波技术对定位数据进行二次处理显得十分必要。卡尔曼滤波是一种基于概率论和数理统计的优化自回归数据处理算法,是高斯过程最优滤波的一种有效算法,具有离散型和连续型两种算法,当对象模型足够准确且系统状态和参数不发生突变时,性能较好,卡尔曼滤波被广泛应用于卫星轨道预测、机器人导航、雷达系统、导弹追踪、人脸识别等领域。本系统采用卡尔曼滤波算法实现人员位置信息的纠正。卡尔曼滤波算法原理如下:
一步预测:

量测更新:
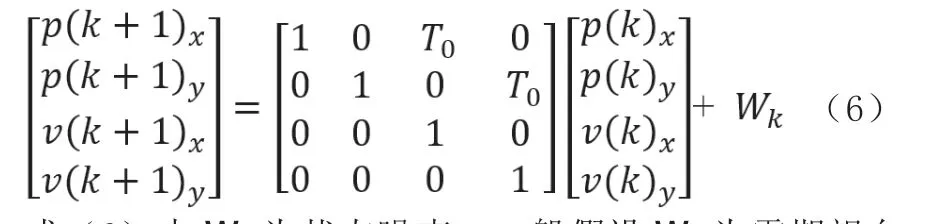
式(6)中Wk为状态噪声,一般假设Wk为零期望白噪声。根据式(6),可知,可以代入式(1)进行一步预测,然后根据系统收到的量测值,根据式(4)进行量测的更新,这样就完成了k+1时刻位置的纠偏。系统根据采用间隔T0,不断地重复进行一步预测、量测更新的过程来完成人员位置信息的纠偏。
2.2 分层分布式人员信息内存库
水电厂主要有发电机层、水轮机层、蜗壳层、开关站、励磁室、厂变室等重要安全管控层级,每个层级可以能有多个安全管控区域。比如发电机层有1#发电机、2#发电机、3#发电机共三个安全管控区域。为了使系统能对进入每个安全管控层级以及每个安全管控层级里的每个安全管控区域进行快速实时地进行监控,构建一个基于内存的分层分布式的实时内存数据库十分必要。本系统基于人员、角色、权限的关系,基于风险区的层次、风险区中的摄像机配置、电厂物理层中的广播配置情况、风险区多变形定义情况等信息,形成分层多风险区域实时动态管理的内存数据结构。
风险区定义默认为四级:分别为低风险区、一般风险区、较大风险区、重大风险区四个安全等级。每个安全等级均可通过层号与电厂发电机层、水轮机层、蜗壳层、开关站、励磁室、厂变室等物理层级建立对应关系。风险区管控主线程实时监测各个定位标签的实时位置,一旦发现某个定位标签进入风险区且该标签不具备进入该风险区的权限,则立刻判断出“人员超许可范围”报警,并启动抓拍任务,驱动离违规人员最近的摄相机进行抓拍取证,并驱动该风险区所在的物理层的广播对违规人员进行警示,提醒进入该区域的人员已非法进入风险管控区域。
除常规支持四级风险安全等级管控外,系统还兼顾了支持任意层级每个层级任意区域的风险区管控机制。系统支持风险区横向及纵向动态扩展功能,风险区管控主线程实时监测系统中风险区的横向及纵向配置情况,一旦发现风险区配置发生变化,系统自动载入最新的风险区配置,形成新的风险区配置情况实时内存关系。分层分布式人员信息内存关系如图2所示。
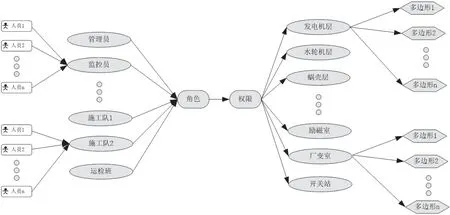
图2 分层分布式人员信息内存关系图
2.3 二维三维融合数据展示
传统的二维电子地图具有可分层、无遮挡的优点,用户使用起来比较方便,但对于不熟悉电厂厂区结构的人来说不够直观。基于三维模型的电厂仿真场景具有优秀的视觉效果,但往往在进入建筑物后的沉浸模式中,用户对于自身所处的位置较难把握。本系统综合二维及三维展示的优点,通HTML Canvas、WebGL、Wasm实现二维三维图层融合,通过Angular实现组件化,在HTML5技术框架内,在浏览器端实现二维三维融合展示。系统中的二维地图采用地图服务预缓存技术,实现浏览器快速展现二维地图;系统中的三维模型使用Unity3D或3dmax软件建模为三维模型obj文件并编译为WebGL和Wasm资源,达到在浏览器中高效展现三维模型的效果。二维三维融合展示如图3所示。

图3 二维三维融合展示
3 系统主要功能
电厂人员作业安全管控系统在构建分层分布式人员、设备、区域信息实时内存库的基础上,实时从分层分布式实时内存库中获取人员坐标位置信息进行逻辑判断,实现了人员实时位置的定位及展示、人员历史轨迹的回放,人员超范围告警、人员静止不动告警、无监护人员作业告警、人员疲劳作业告警等功能。基于对实时视频流的智能分析,实现了人员未戴安全帽告警等安全管控功能。任何连通的不规则区域,理论上都可等效为一个任意条边的多边形;对于不连通的区域,可以等效为多个任意条边的多边形;任何多边形都由其所对应的顶点来确定。电厂人员作业安全管控系统根据以上三个原则,来定义设备的安全管控区域,并把这些参数配置信息存入计算机内存,实现对设备进行实时分层级分区域安全管控。人员未佩戴安全帽告警抓拍如图4所示。

图4 人员未戴安全帽告警抓拍
4 结语
电厂人员作业安全管控系统的二维三维融合数据展示,同时吸取二维三维展现技术的优点,把二维地图、三维真实场景完美地结合起来,为数字孪生电厂建设提供了方案参考;电厂人员作业安全管控系统把基于卷积神经网络的视频流实时分析、人员目标检测、定位追踪与基于UWB高精度定位的人员目标定位追踪进行有效组合,即可保证人员定位的精度(误差≤30cm),也可以防止电厂作业人员故意不佩戴含定位功能的安全帽或故意把定位标签从安全帽上取下来以躲避定位追踪等极端情况。电厂人员作业安全管控系统,已经在福建三明某水电站、广东广州某火电厂成功投入运行,系统运行至今稳定可靠,达到了系统预期设计的目标,该系统的投运提高了电厂的安全管控水平,推动了电厂数字化、智能化建设。
