穿梭车安全控制系统的设计与应用
2022-08-19王冠华蔡荣忠唐敬方谭丽梅徐彩珠
王冠华,蔡荣忠,唐敬方,谭丽梅,徐彩珠
红云红河烟草(集团)有限责任公司会泽卷烟厂,云南省曲靖市会泽县金钟镇东郊 654200
穿梭车作为卷烟物流输送的主要设备在运输过程中发挥着重要作用[1-2]。但实际生产中,由于穿梭车的运行轨道区域未全部封闭,容易出现现场人员穿行或跨越作业区域以及物体掉落等问题,存在安全隐患。穿梭车现有的安全联锁装置包括安全门和急停按钮,均需人工手动操作才能使穿梭车报警停机。当前因穿梭车运行轨道区域缺乏检测装置[3-4],无法实现自动检测及停机功能。对此,刘伟等[5]采用条形码读码器和激光测距仪对轨道式穿梭车进行了改造;吴泽樟[6]在穿梭车的前后方分别加装红外探测传感器,利用传感器信号对穿梭车进行控制;王建成等[7]在穿梭车两侧加装检测装置,实现穿梭车的安全控制;张广喜等[8]利用工业摄像机采集运行轨道与穿梭车的图像数据,以识别运行轨道上是否有异物,同时在轨道两端四角处分别安装红外热释电传感器,用于检测是否有人员进入运行轨道区域。上述改进虽在一定程度上降低了穿梭车的安全风险,但检测功能单一且有局限性,在安全控制方面仍然存在检测盲区。激光传感器技术具有测量精度高、准直性好、抗干扰能力强等优点,在精密测量、安全监测以及智能控制等领域应用广泛[9]。其中,温凯[9]基于脉冲式激光测距原理构建了激光测距系统;苏燕等[10]基于三角测量原理构建测距传感器并设计了一种激光测距系统;张海涛等[11]将阵列探测技术应用于回波信号较弱空间,提高了碎片激光测距的准确率。为此,以红云红河烟草(集团)有限责任公司会泽卷烟厂成品高架库使用的穿梭车为例,采用激光测距、激光阵列检测等技术设计了一种穿梭车安全控制系统,以期提高穿梭车运行安全性能。
1 系统设计
1.1 总体构架
穿梭车安全控制系统由计算机、激光传感器、测距传感器、工控摄像头、单片机、固态继电器、音箱等部分组成,其核心是采集激光阵列信号、车辆测距定位以及安全输出控制,见图1。系统采集的数据来自激光传感器、测距传感器和工控摄像头。其中,采用激光传感器构建激光阵列检测方式,检测信号通过单片机经模数转换器转变为计算机可识别的数字信号;测距传感器通过串口通信方式(RS-485转RS-232)接入计算机;工控摄像头采用USB方式接入计算机。数据处理的核心是计算机,利用Microsoft Visual Studio(美国微软公司)软件编程进行运算和判断;数据通过输出模块经数模转换后驱动固态继电器,实现穿梭车的自动启停、报警提醒并将图片、日志记录等信息进行保存。
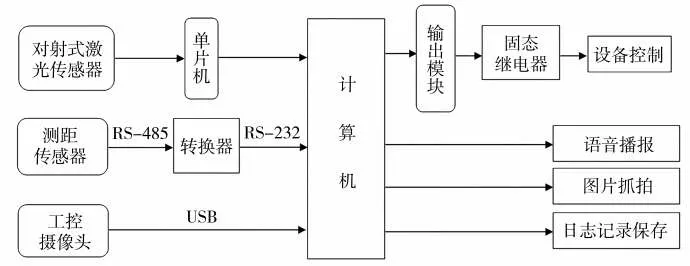
图1 穿梭车安全控制系统结构图Fig.1 Structure of safety control system for shuttle vehicle
1.1.1 激光阵列信号采集
(1)激光阵列布局。由于穿梭车轨道间宽度为90 cm,故采用分布式多点激光检测方式,即采用6对激光传感器(KM8LD-200P1型对射式激光传感器,深圳市兴天宇电子设备有限公司)组成一元激光阵列,形成由线到面的检测区域,见图2。6对激光传感器分别布置在穿梭车轨道始末两端,始端为发射端,末端为接收端,发射端与接收端等高等间距,同一端各激光传感器间隔20 cm。其中,穿梭车轨道外侧布置2对激光传感器,内侧布置4对激光传感器,故轨道内侧的4条激光线可完全覆盖检测区域。根据人体身高及相应尺寸,设定轨道外侧激光传感器安装高度为40 cm左右,内侧激光传感器的高度距穿梭车车体底部15 cm,避免穿梭车运行时因轨道不平整而遮挡激光线。
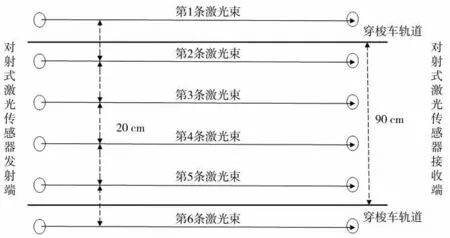
图2 激光阵列布局示意图Fig.2 Schematic diagram of laser array layout
(2)信号处理。激光传感器发射端与接收端可以形成激光线,6对激光传感器共有6条激光线,当其中某条激光线被遮挡时,该激光传感器输出电压为0,而未被遮挡的激光传感器输出电压为24 V,故激光传感器输出电压包括0和24 V两种信号。而单片机信号范围为0~5 V,为满足单片机信号采集要求,采用分压电路对输出电压进行规格化处理,见图3。根据公式U0=Ui/(R1+R2)R2,当作业区域无人员闯入或物体掉落,激光线未被遮挡,输出电压Ui为24 V,经过电阻R1和R2分压后,U0=24/(50+10)×10=4 V;当激光线被遮挡时,输出电压Ui为0,经过电阻R1和R2分压后,U0=0/(50+10)×10=0。因此,激光传感器输出电压可转换为0和4 V两种信号,能够满足单片机对信号范围的要求。
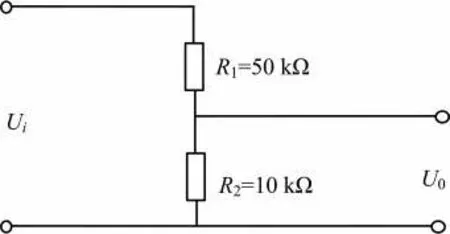
图3 分压电路图Fig.3 Voltage divider circuit diagram
(3)信号采集。由于激光阵列检测有6路输出电压且均为模拟信号,故采用多端口电压输入单片机进行数据采集。图4中,STC90C58AD单片机(上海宏晶科技有限公司)共有8路10位高速A/D转换器,其A/D转换口在P1口(P1.0~P1.7),电压输入型A/D数量(8路)大于激光阵列电压输出数量(6路),能够满足激光阵列信号采集要求。选择单片机中的6路模拟量输入端(P1.0~P1.5)对接规格化处理后的激光阵列信号,由单片机对信号进行计算并转换成计算机可识别的数字信号。计算机与单片机采用串口通信方式(RS-232)进行数据传输,可实现激光阵列检测信号的实时采集和监控。

图4 单片机信号采集线路图Fig.4 Data acquisition circuit diagram of single chip microcomputer
1.1.2 车辆测距定位
测距传感器采用集发射与接收为一体的激光传感器(型号MSE-LED10,烟台莫顿测控技术有限公司),与一元激光阵列共同构成二元激光阵列,由发射端向目标端发射激光,经目标端反射后返回接收端,采用计时器测定激光从发射到接收的时间T,已知光速V,可计算得到总行程L,而发射端到目标端的距离为L/2。图5中,在穿梭车轨道起始端,将激光测距传感器安装在两轨道正中间位置,并在穿梭车车体上安装反射板,根据测距传感器发出的激光照射到反射板再返回至测距传感器的时间,可以追踪定位穿梭车位置并记录报警停车位置。测距传感器与计算机采用串口通信方式,由于两者通信接口不一致,在两者之间增加一个串口转换器MODEL 2107C(RS-232至RS-422/485双向转换器),将测距传感器RS-485信号转换成RS-232信号。计算机将接收的RS-232信号转换成数字信号并以固定频率上传,实现穿梭车位置的实时监测和信息更新。
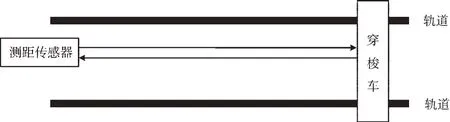
图5 穿梭车测距定位示意图Fig.5 Schematic diagram of laser ranging and shuttle vehicle positioning
1.1.3 安全控制
安全控制方式是指一旦检测到人员闯入或物体掉落到穿梭车作业区域时,立刻进行语音报警并停止穿梭车运行。计算机根据激光阵列检测信号进行判断,当1条或多条激光信号从高电平向低电平变化时,计算机监控软件输出数字信号,由输出模块进行控制并驱动继电器,进而控制穿梭车的安全联锁信号,实现穿梭车自动启停。此外,计算机同步启动智能语音程序,通过音箱进行安全广播,提醒人员注意。其中,输出模块采用16通道的隔离数字量模块DAQM-4304(西安舟正电子科技有限公司),输出通道为NPN集电极开路输出方式,可直接驱动继电器,通信方式为485总线。输出模块的输入端RS-485接口与计算机接口无法直接对接,故增加一个串口转换器MODEL 2107C,将计算机的RS-232信号转换成RS-485信号,并将RS-485信号传送至输出模块;输出端与继电器的24 V线圈相连,继电器输出线路与安全开关信号串联,共同构成安全联锁开关,安全联锁开关一旦触发,穿梭车立刻停止运行。
农作物种植过程中的病虫害防治十分重要,甚至直接关系到当年玉米的产量是否会大幅度下降,乃至颗粒无收。目前,我国山区玉米高产栽培技术应用过程中对病虫害防治、药物使用时机、药物施用计量有较为严格的要求,但我国农民普遍存在缺乏系统培养的问题,对于病虫害的防治方面存在缺失,农民在辨别病虫害、使用药物的过程中存在滞后问题和缺乏针对性、有效性的问题,导致病虫害大面积泛滥、不科学施用药物导致害虫产生抗药性,玉米螟、地老虎、叶斑病等病虫害的频繁发作使玉米高产栽培技术的作用无法有效显现,推广进度受到阻碍。
1.2 软件设计
软件设计在Windows开发环境中进行,利用Microsoft Visual Studio(美国微软公司)软件编写源程序,包括系统初始化、视频采集模块、激光测距模块、激光阵列检测模块、硬件联锁停机、语音播报、视频图片抓拍、事件日志记录等,程序流程见图6。首先进行系统初始化,对应用变量、输入输出端口等进行定义;当计算机被触发时,换算得到各条激光线的电平数据值,当所有激光信号均为高电平“1”状态时,表示作业区域正常,系统返回继续监测;当有1条及以上激光信号为低电平“0”状态时,表示存在人员闯入或物体掉落到作业区域,系统立即输出停止穿梭车信号,并调用视频图片捕捉程序对现场情景进行抓拍和保存,同时将穿梭车停车位置、被遮挡激光线标号、被遮挡激光线数目、事件停机时间等信息合并为1条记录追加保存,调用相关语音库内容进行播报;当故障处理完毕后,系统进行延时设备恢复警告及复位穿梭车安全联锁开关,系统返回到继续监测状态。
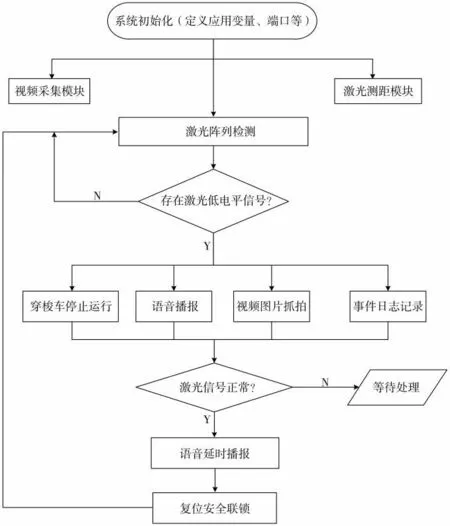
图6 控制系统程序流程图Fig.6 Program flow of control system
1.2.1 数据处理
计算机将接收到的单片机数据存储到一维数组内存空间,每两个字节代表1条激光线的信号值。其中,第1条激光线对应数组的1、2字节,第2条激光线对应3、4字节,第3条激光线对应5、6字节,第4条激光线对应7、8字节,第5条激光线对应9、10字节,第6条激光线对应11、12字节。由于单片机采用的是10位A/D转换器,可以将模拟量信号转换为0~1 024(210)的数字量,而单片机可检测的最大电压为直流5 V,将其换算为mV则需利用四舍五入函数Round()再乘以1 000,从而得到实际电压的整数值。因此,激光线电压数值=Round(((高字节×256+低字节)/1 024)×5,3)×1 000。将6条激光线对应数组的字节代入公式进行计算,即可得到各条激光线的电压数值。计算机根据激光线的电压数值进行“或门式”程序判断,若有1条激光线电平进行高低跃变,表明有人员或物体进入作业区域;若6条激光线电平均未跃变,表明无人员或物体进入作业区域,由此实现对激光线的实时检测。
1.2.2 痕迹管理
摄像头在穿梭车运行过程中起到视频监控作用,当穿梭车作业区域有物体引发停机时,计算机监控软件启动抓拍程序控制摄像头进行抓拍并上传至计算机进行保存。利用测距传感器可检测穿梭车的停车位置,在穿梭车运行过程中一旦检测到激光线被遮挡,系统将产生对应的激光线标号、被遮挡激光线数目、穿梭车停机位置、日期时间等信息,并根据事件和日期添加记录和分类。
1.2.3 设备恢复
检测到穿梭车作业区域无人员或物体时,系统进行延时设备恢复警告及复位穿梭车安全联锁开关。第一次语音警告后,启动延时程序,延时时间15 s,同时按100,99,98,…,3,2,1,0的递减顺序在监控界面进行显示;当屏幕显示到数字9时,第二次语音警告,输出9,8,7,…,0读数,然后向输出模块DAQM-4304发送接通继电器的指令,完成安全联锁开关复位;第三次语音警告后,重新启动穿梭车进行输送。
1.2.4 监控界面与显示
由图7可见,系统实现了可视化图像功能。监控界面上方通过工控摄像头采集现场视频,可实时动态显示穿梭车的运行轨迹。监控界面下方可实时显示车辆测距值以及穿梭车运行位置,能够模拟显示6条激光线的检测状态,有效区分“无障碍物阻挡”和“被障碍物阻挡”两种状态,红色表示“无障碍物阻挡”,黑色显示“被障碍物阻挡”,其中1表示1号激光传感器,2表示2号激光传感器,依此类推。
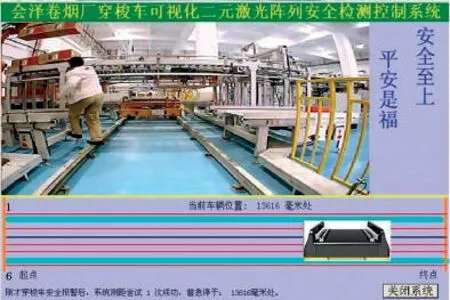
图7 系统监控界面Fig.7 Monitoring interface of the system
2 应用效果
2.1 实验设计
设备:BZF105型穿梭车1台(昆明船舶设备集团有限公司);PPC-3708A-N270型计算机1台(沈阳创想科技发展有限公司);KM8LD-200P1型对射式激光传感器6对(深圳市兴天宇电子设备有限公司);MSE-LED10型激光测距传感器1个(烟台莫顿测控技术有限公司);RER-USBFHD01M型工控摄像头1个(深圳市锐尔威视科技有限公司)。
方法:以应用于红云红河烟草(集团)有限责任公司会泽卷烟厂成品高架库的穿梭车为对象,采用支架将6对激光传感器分别安装在穿梭车轨道两端,同一端各激光传感器间隔20 cm;2对轨道外激光传感器安装高度为40 cm,4对轨道内激光传感器安装高度为10 cm(距穿梭车车体底部15 cm)。在穿梭车轨道起始端,将激光测距传感器安装在两轨道正中间位置,安装高度为45 cm,并在穿梭车车体上粘贴反射板。将摄像头安装在穿梭车前方的安全防护栏上,检测范围覆盖整个作业区域;计算机安装在穿梭车作业现场,方便在线监控。系统安装调试完毕后投入使用,于2020—2021年对穿梭车安全控制系统进行跟踪记录,以验证系统检测准确率。
2.2 数据分析
由表1可见,2020—2021年间穿梭车安全控制系统共发出故障报警11次,经核实无误报和漏报,并可准确定位穿梭车停车位置及激光线标号,检测准确率达到100%。
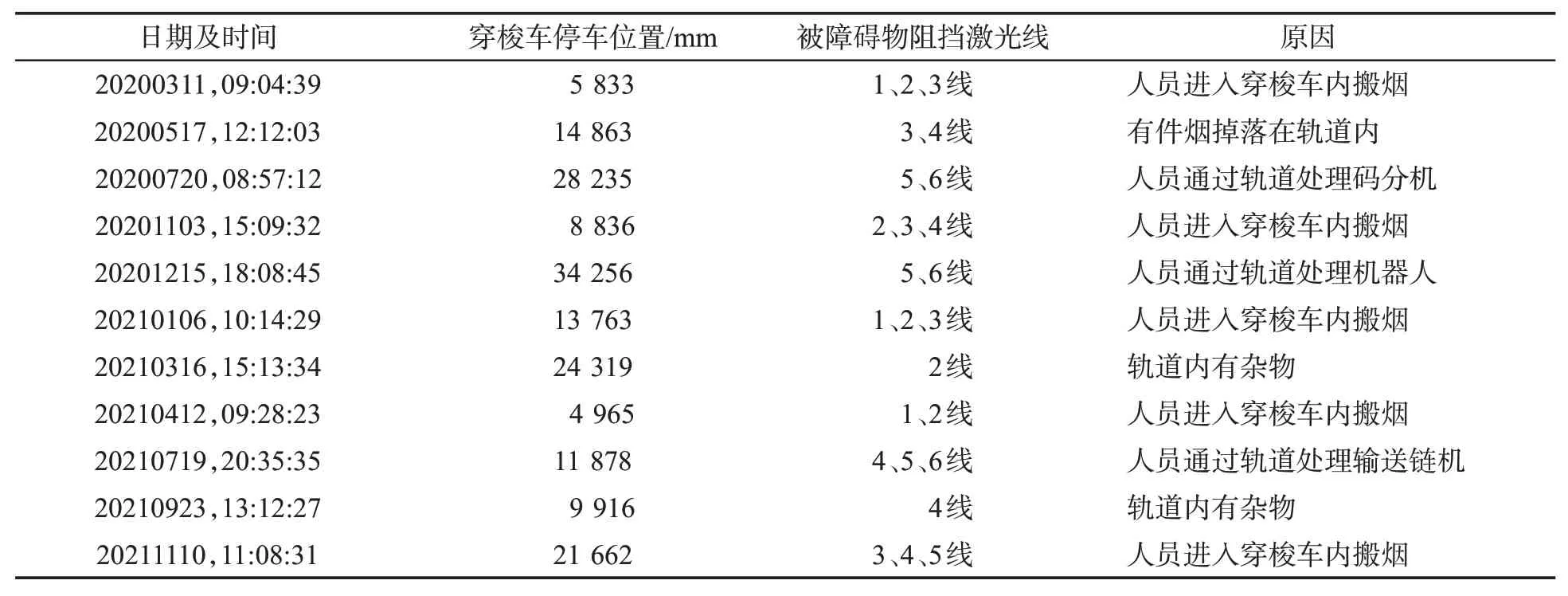
表1 系统故障报警统计Tab.1 Statistics of alarms sent by the system
现场观察发现,系统在穿梭车作业区域形成激光阵列检测,当有人员或物体进入时,系统立即报警停机,同时播报安全语音提示,监控界面显示提示信息并记录相关数据;当故障解除后,3次安全语音提示后恢复正常运行。
3 结论
设计了一种穿梭车安全控制系统,将分布式多点激光对射与单线激光测距相结合,同时利用视频采集技术形成可视化的二元激光阵列检测,实现了穿梭车作业区域的在线实时监控。以会泽卷烟厂成品高架库的穿梭车为对象进行测试,结果表明:2020—2021年间穿梭车安全控制系统共发出故障报警11次,无误报和漏报,可准确定位穿梭车停车位置及激光线标号,检测准确率达到100%,实现了穿梭车运行轨道区域的全覆盖检测,有效降低了穿梭车运行安全风险。
