基于51单片机的油气管道检测机器人设计
2022-08-19向小康罗继文许晨义李西蒙
向小康,罗继文,许晨义,李西蒙
(西北大学,陕西西安,710000)
0 引言
本文针对中小型口径无流体油气管道,基于STC89C52RC单片机设计了一款在能够在弯管,直管中稳定行走并且通过蓝牙与手机连接该位置的温湿度参数实时被外面的手机接收的油气管道检测机器人。通过安装在机器人前端的监控摄像头,同时也能观察到管道的内部真实环境。使得检测人员不必亲自进入危险环境中就能通过系统发出的数据看到管道内部的环境并得到想要的温湿度数据。相比于传统的人工检测,在一定程度上提高了检测人员的安全性。减少了检测过程中事故的发生几率。
1 探测机器人整体结构
1.1 外部机械结构框架
针对管道探测机器人的特殊工作环境,最终采用三角形桁架的外部框架和支撑轮式的行走方式。机械结构如图1所示。三角形桁架相比于传统方形框架有更强的稳定性。在油气管道这种密闭且情况多变的环境中,三角形桁架结构在遭到冲击,翻倒的情况下能更好的保持车体的完好性,使框架内的控制系统更加安全。同时三角形框架也具有结构简单,制造成本相对较低的优点。
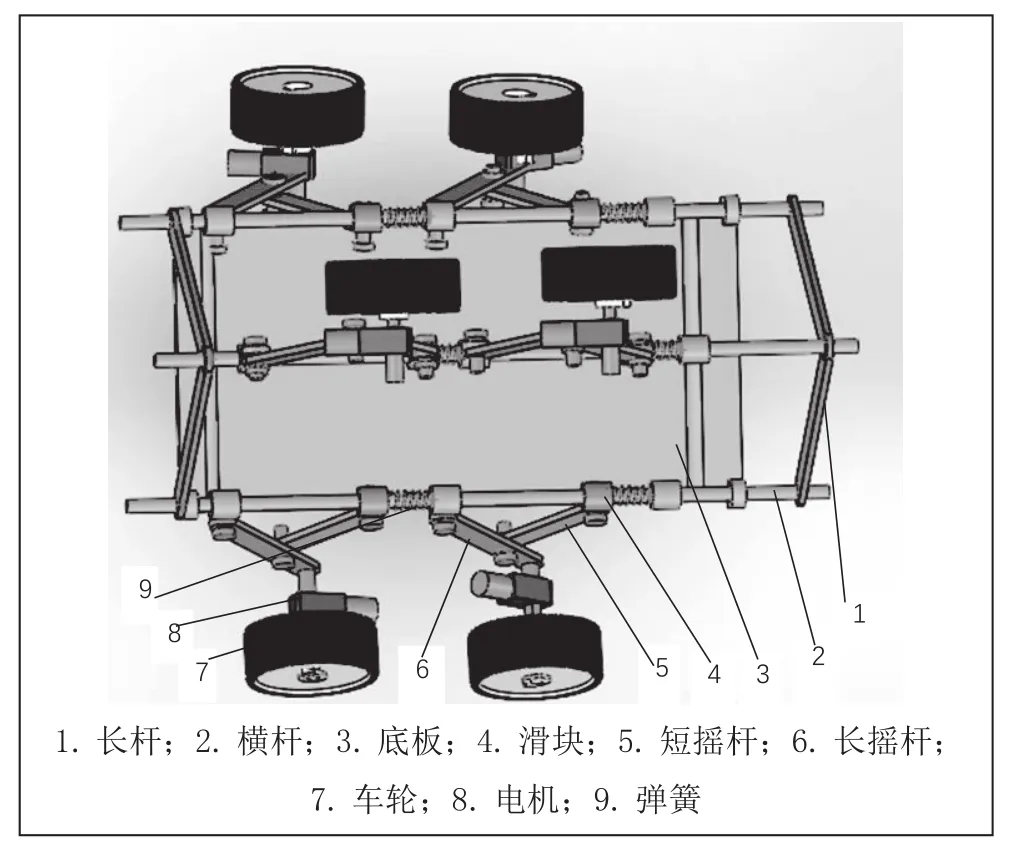
图1 探测机器人外部机械结构展示
管道探测机器人主流的运动方式主要有蠕动式,履带式,和支撑轮式。支撑轮式具有良好的环境适应性,适用于常见中小口径的管道,且结构简单,成本较低。所以选择运动方式为支撑轮式。
由于实际生产生活中管道口径多样性,就要求管道探测机器人在面临不同管径的管道有一定的自适应性。为解决这一问题本文采取了弹簧变径,如图2所示。当机器人进入不同管径管道或在同一管道中经过不同直径区域时,通过滑块压缩弹簧力度的改变,使得机器人的径向尺寸变化到适应管径的大小。
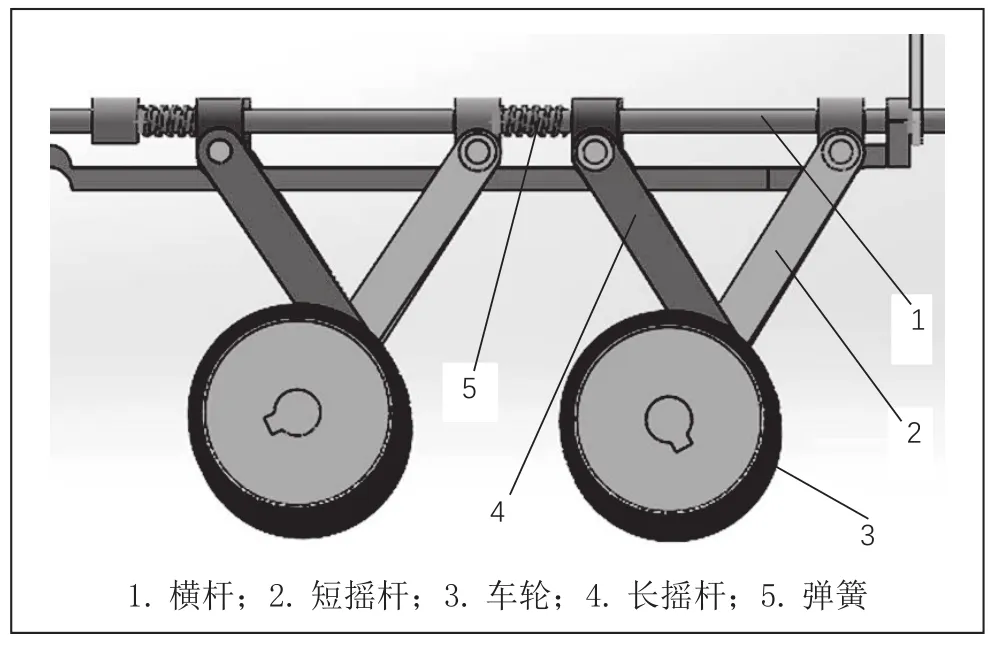
图2 管道探测机器人的弹簧变径结构
1.2 控制系统硬件结构
此设计的核心控制系统主要基于搭载STC89C52RC单片机的最小系统板。由其连接一个L208N驱动模块来控制6个电机的工作状态来实现油气管道探测机器人在各种管道环境如弯管,直管,十字管的稳定行走。在机器人前进的过程中DHT11温湿度传感器采集数据,单片机将其转化为数字信息,暂存在寄存器SBUF,最后再由HC06蓝牙模块发送给手机APP,通过蓝牙串口助手实时显示。除此之外在在探测机器人前端安装一个独立的微型摄像头,使得内部的真实环境通过WIFI发送到手机。控制系统流程图见图3。STC89C52RC单片机与各元件的详细连接情况硬件电路见图4。
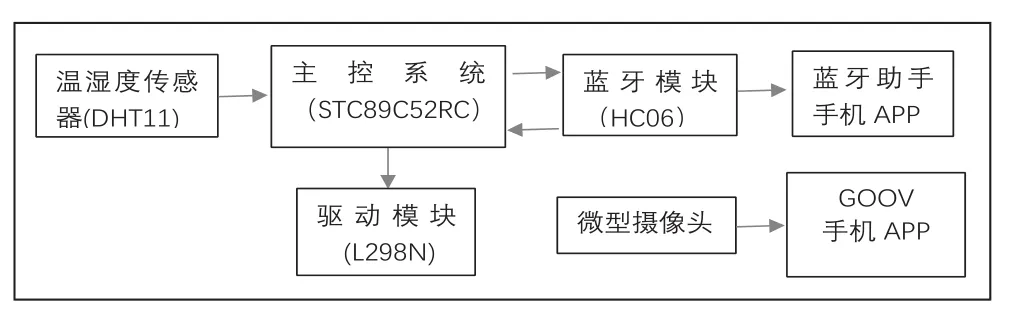
图3 控制系统结构框图
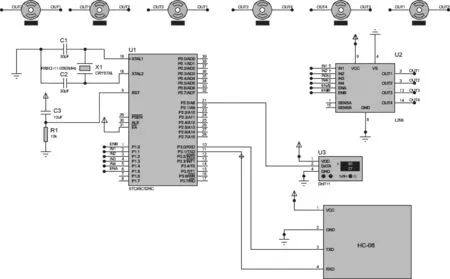
图4 油气管道探测机器人硬件电路
1.2.1 控制器的选择
油气管道探测机器人的控制器采用STC89C52RC单片机,它与复位电路,时钟电路等集成在一块最小开发板上。所用的晶振频率为11.0592MHz。
单片机发挥的作用是接收来自手机蓝牙发送的指令,处理指令,并给L298N送去信号控制电机的运动状态,从而控制机器人的运动状态。同时要定时处理DTH11采集到的温湿度数据,并通过蓝牙模块发送给手机。对比市面上各类单片机,最终控制器选择了STC89C52RC这一款单片机。它是由中国STC公司生产的低电位,高性能CMOS8位单片机,片内含有8K的可反复擦写的只读程序存储器(PEROM)和512字节的随机存取数据存储器(RAM)。功能强大,灵活应用于各种控制领域,能够满足本设计的要求,而且价格相对较低。它的编程语言主要有汇编语言和C语言,本设计是使用C语言编写。
1.2.2 无线通信方式
在对探测小车的控制方式的选择上,主要有红外,蓝牙,WIFI三种常见的控制,进行整理得出如下分析如表1所示。
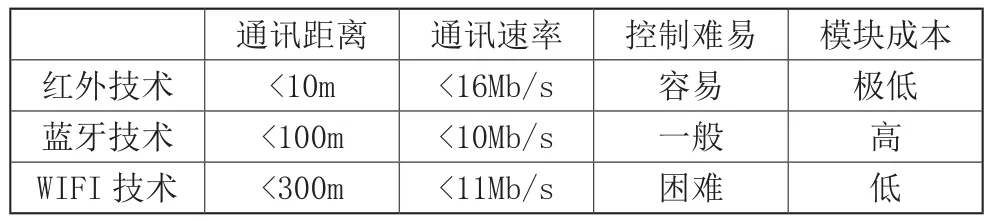
表1 三种无线技术比较
红外技术成本低,速度快,但是容易受环境影响,且小车快速行驶中不易控制,需要遥控器正对红外接收器;WIFI技术虽然传输距离远,成本低,但是控制相对复杂,需要一对一模块进行传输;蓝牙技术则可以在PC或手机端进行控制,控制难度一般,环境影响不大。通过对比分析,最终采用蓝牙通信,使用HC-06主从一体蓝牙串口模块。HC06采用CSR公司的BC417143芯片,有四个引脚, VCC和GND接单片机电源端和地,TXD和RXD接单片机的RXD和TXD。工作模式选择。
1.2.3 控制系统的传感器
基于采集油气管道内部温湿度的目的,控制系统使用DTH11温湿度传感器。温湿度传感器DTH11主要是由一个NTC测温元件和一个电阻式感湿元件组成,系统采用含有DTH11的集成电路板,使得电路整体变得简洁。只需要它的三个引脚VCC,DATA,GND与单片机相连接。DHT11传感器的生产中都在极为精确的湿度校验室中进行校准。在管道的环境下,能够起到测量的作用。
1.2.4 电机驱动模块
本设计采用L298N驱动模块。它的作用是根据单片机发出的指令控制6个电机的转动状态从而控制探测小车的前进和转向。L298N是一种高电压、大电流电机驱动芯片。可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;可以外界检测电阻,将变化量反馈给控制电路。
2 油气管道探测机器人控制系统软件设计
首先,手机app蓝牙串口助手,向蓝牙模块发送让探测小车驱动的指令,蓝牙模块接收指令,并发送给单片机,单片机接收指令并做出反应对L298N下达指令,L298N于是控制电机的转动状态实现探测器小车的驱动。
系统的温湿度自上电就开始工作每隔一段时间就将采集到的温湿度变化的信号,经单片机处理由蓝牙模块发送到手机app。以下图5,图6为系统软件的控制流程(图5为温湿度采集,图6右为控制电机),图7、图8为手机app接收数据后的界面以及控制小车驱动的界面。
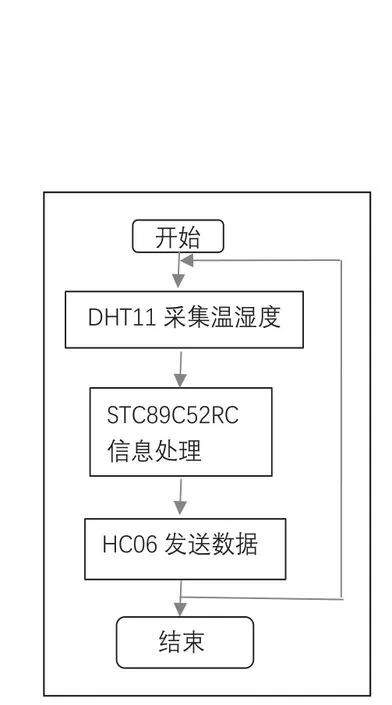
图5 温湿度采集系统流程
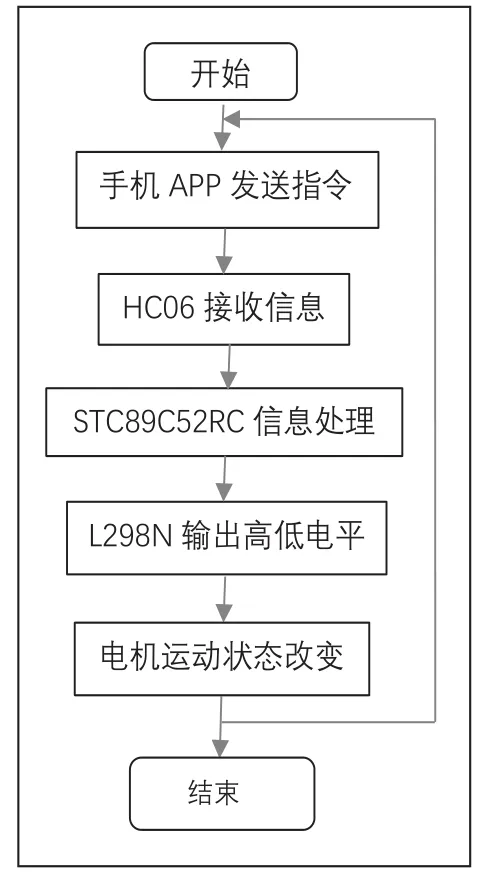
图6 电机控制系统流程
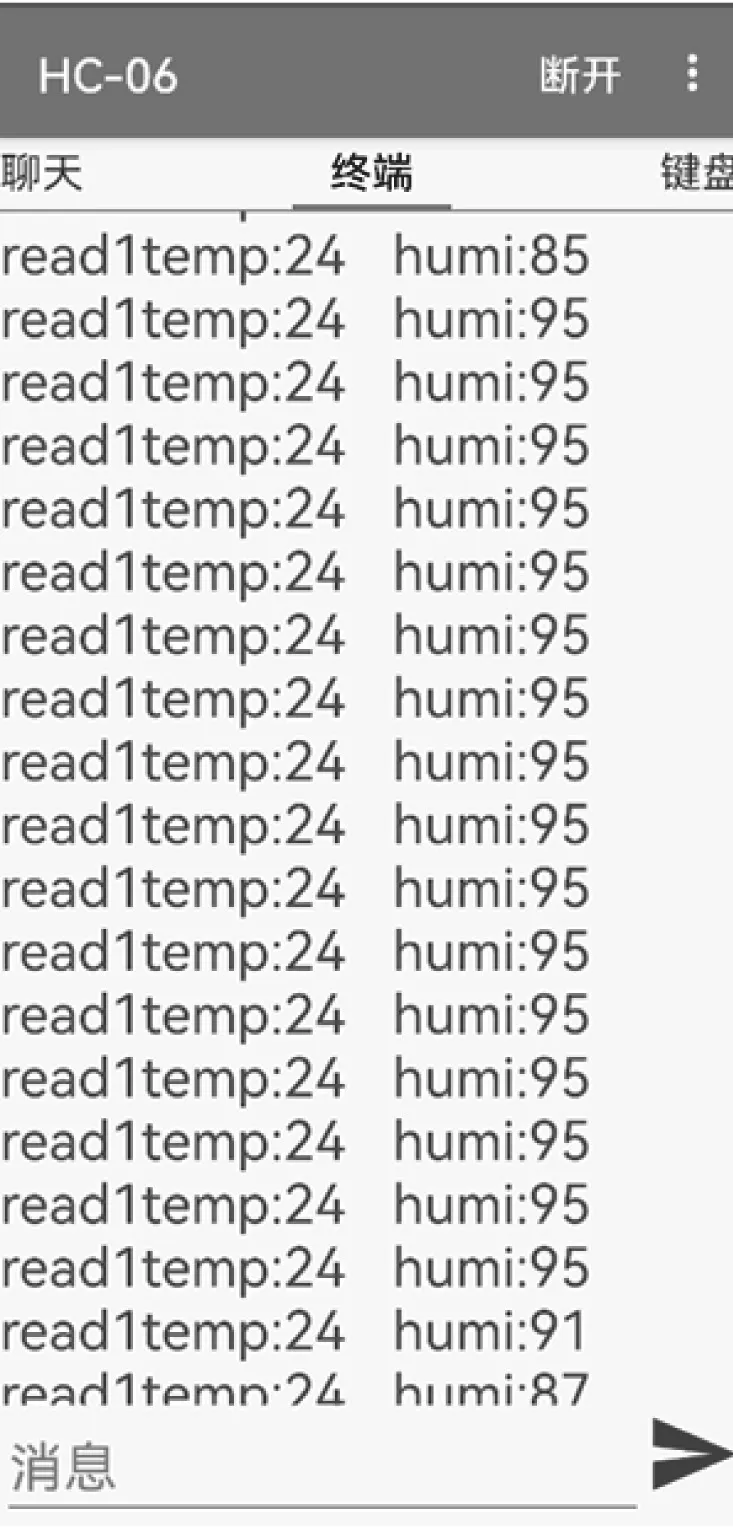
图7 温湿度传回

图8 机器人驱动控制
3 结束语
本研究是以STC89C52RC单片机为核心控制系统,结合适用于油气管道环境的机械结构的油气管道探测器。它能够完成一定的温湿度检测工作并通过蓝牙无线传输数据。主要应用于中小口径无流体非工作状态下的油气管道的内部环境检测。在一定程度上,本设计还可以广泛应用于石油化工企业、机械制造业、和城市管道检测。
