基于虚拟现实技术的侦察装备仿真训练系统设计
2022-08-19单显明高永香
单显明,高永香,潘 月
(沈阳工学院,辽宁 抚顺 113122)
1 系统需求分析
基于虚拟现实技术的训练是指以虚拟现实技术为支撑,创建提供模拟实兵、实装、实弹的虚拟环境,培训和提高受训者作战能力的训练活动,属于模拟训练。虚拟现实技术的发展及其在军事训练中的广泛应用,为侦察装备仿真训练提供了新的思路。
某型侦察装备进行侦察作业时,首先需要完成方位标定,即根据作战任务给予天线正确的方位和高低角,标定是影响装备测量精度的重要因素之一。该侦察装备使用实装进行标定操作训练时,需要较大的场地保障,训练效费比不高。为了节省训练经费,提高训练效果,采用数字地图技术、三维地形建模技术、三维场景动态漫游技术、碰撞检测技术以及虚拟仪表动态显示技术,实现了满足实时性要求的某型侦察装备标定仿真训练系统。
仿真训练系统需要大规模的三维虚拟训练环境,如何生成实时三维场景是需要解决的关键问题。现有研究采用了自适应分块的不规则三角网Delaunay改进算法对地形数据进行优化处理,解决了三维训练场地模拟仿真的问题。
2 系统总体设计
2.1 标定作业方法
侦察装备进行战斗准备时,需要在我方装备阵地一侧选择2~3个与装备阵地通视的标定方位物。方位物应为距离装备阵地500~2 000 m,独立、明显且不易被敌人摧毁的地物、地标。为便于夜间标定,在我方一侧距离装备阵地100 m左右应有能设置夜间标定方位物的通视场地。
装备通常在工事修整、构筑完毕后,利用黑暗或能见度不良的时机占领阵地。作战任务紧急时,也可先占领阵地,完成战斗准备,战斗间隙时再进行工事构筑与伪装。为保证有充足时间进行装备架设、标定等准备工作,装备至少应在战斗发起前40~60 min占领阵地,并展开架设。装备架设时,要保证天线车定位准确,天线法线方向对准侦察区域,操控车和电源车架设于天线车40 m远的隐蔽安全的地方。
当装备站长下达“架设”命令后,装备各车驾驶员应迅速将各车辆开入各自阵地,天线车在站长的指挥下进行准确定位,并确保装备天线车尾部对向侦察方向中心。装备展开后,站长组织所属人员开机调试和检查装备,准备作业用具,进行方位标定、初始化操作,并开通通信设备,检查装备与指挥系统数据传输功能,且及时上报。
2.2 驱动面板布局
装备进行标定操作时通过伺服操作面板进行,装备的驱动组合面板布局如图1所示。通过面板操作可以完成天线方位、俯仰及姿态的控制,并通过数码管显示数值,其中,显示器部分为光学望远镜的显控部分。

图1 驱动组合面板分布图
侦察装备占领阵地后,由操作手操作驱动组合面板,根据选定的方位物完成标定作业,实际作业时,系统必须实现驱动组合面板操作与装备天线随动,如图2所示。

图2 驱动组合面板操作及装备天线随动过程
2.3 系统功能模块
系统主要包括四个功能模块,如图3所示,分别为天线姿态和环境窗口、光学标定镜/电视、天线伺服操作面板和天线微调摇把。

图3 系统功能模块
天线姿态和环境窗口模拟天线的姿态等视景,光学标定镜/电视窗口模拟装备电视标定显控箱或者光学标定镜的显示及相关操作,天线伺服操作面板窗口模拟装备天线车上的天线操控面板,天线微调摇把窗口模拟天线标定时的转动手柄。
各窗口与系统之间以及各窗口相互间的随动情况如下:
天线姿态和环境窗口和光学标定镜/电视窗口可根据训练开始前训练软件所设定的装备阵地位置实时生成装备位置与天线姿态视景、标定视景;
天线姿态和环境窗口和光学标定镜/电视窗口中的视景与虚拟装备控制面板窗口中的操控随动,配合完成装备天线的升降、转动等模拟训练;
天线姿态和环境窗口和光学标定镜/电视窗口中的视景与垂直和水平控制摇柄窗口随动,完成对装备标定的模拟训练。
2.4 仿真软件建模
仿真软件选用Vega实现视景驱动,Vega是开发实时视觉和虚拟现实的软件环境,它不但包含图形环境Lynx,而且包含可以提供最充分的软件控制和最灵活的应用编程接口。它可以在不涉及源代码的前提下快速而容易地改变应用程序的性能,如显示通道、多CPU资源分配、视点、观察者、特殊效果、系统配置、模块和数据库等。
系统通过Lynx建立ADF文件,再将ADF中定义的属性和Vega的API调用结合起来,可以大幅度地减少源代码的开发时间,降低了对开发人员的要求。在Windows平台上开发基于MFC的应用程序的仿真软件建模方法如图4所示。
3 关键技术及应用
3.1 三维虚拟场景的生成
由于装备方位标定仿真系统不但需要大规模战场环境的地形建模,而且需要实时地显示和漫游地形,要求具有很高的地形逼真度以及模型的分布式驱动,所以,系统采用MultiGen Creator三维建模工具进行战场环境仿真。

图4 仿真软件建模
三维虚拟场景需要对战场目标态势进行初始化,生成动态战场态势侦察虚拟场景,虚拟生成地物、植被景象并将地物、植被实时叠加显示于当前侦察场景中。三维场景仿真时,指挥员不但可以根据需要在三维视景中进行雨、雪、雾等环境设置,还可以设置三维视景的光照效果,增加训练难度。
三维地形模型构建的核心是地形转换算法,主要包括Polymesh、Delaunay、CAT和TCT四种转换算法。其中,不规则三角网运算时,先找出点集中最近两点,连接成一条边,然后,按Delaunay三角网的判别法则找出第三点,再依次处理全部区域。该算法占用内存空间较小,但时间效率较低。
由于本系统地形数据面积较大,为了在较短的时间内得到较好的处理效果,本文采用了自适应分块的不规则三角网Delaunay改进算法对地形数据进行优化处理。
由于不同地形离散点的分布存在很大的差异,影响了地形的生成效果,因此,考虑将每块地形的最小点数设置成一个动态变化的阈值,地形生成时,根据需要动态确定一个阈值来控制每块地形点数的下限。对于给定点集,首先用点集内总点数除以每块的平均点数得到总块数,然后,由横、纵坐标跨度求出块宽度、块行数及块列数。给定块行数、块列数后,再根据块宽度及起点坐标,就可求出当前块的边界和检索整个点集,最后,根据索引关系选出坐标在此块边界范围内的点,存入与此块对应的子点集中,直到所有的块都生成完毕为止。
3.2 瞄准镜和电视标定镜建模
OpenGL是一个非常优秀的开放式三维图形接口,它具有跨平台性、简便、功能完善的特点,但直接利用OpenGL进行复杂的视景仿真的开发会耗费很多的时间,开发起来比较困难。为了解决这些问题,必须将OpenGL直接引入Vega中。在三维坐标系中利用画点、画线、画多边形构建三维场景,建立瞄准镜的三维模型,其建模思想是先画一个中心是空心的圆环,然后用绘制的窗口覆盖这个圆环。瞄准镜建模方法如图5所示。
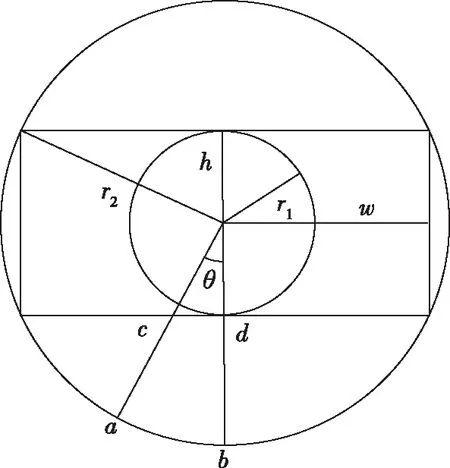
图5 瞄准镜建模方法
首先,确定瞄准镜圆环的内外半径、。环内矩形为窗口,其宽为,长为,则
=min(12,12)
(1)

(2)
其次,根据半径与圆环相交的四个点、、、,用OpenGL矩形函数画图,为了绘制出圆环,可将值取无限小,然后绘制出圆环,最后,用窗口覆盖这个圆环即得到瞄准镜。
电视标定镜建模方法如图6所示。先画四个矩形abik、fkhm、mdlc、ielg和中间的矩形efgh,这时绘制窗口的四个点的坐标应该是、、、四点的坐标。

图6 电视标定镜建模方法
3.3 装备车模型建模
本文使用MultiGen Creator软件以可视化交互方式创建装备车辆的三维数据库。3D物体模型是体现空间三维造型、实现训练者体感和真实沉浸感最为关键的部分,在对3D物体的建模过程中,尤其要注意和考虑怎样正确地划分BSP树,以确定正确的遮挡关系。在装备建模时,还要重点注意DOF节点设置,装备标定作业时,装备天线需随着对控制面板的操作实时地进行俯仰和水平转动,为了能模拟此动态关系,在建模时需要设置自由度节点。
自由度是在模型结构视图中由DOF节点定义的,设置DOF节点分以下三个步骤。
1)创建DOF节点。所有能够移动的物体和表面节点必须是能控制其运动的DOF节点的子节点,在装备车模型中,创作一个DOF节点,并且把天线做成DOF节点的子节点。
2)定位DOF节点。对DOF节点进行定位,首先要建立一个DOF的当地坐标系统,然后对该坐标系统的原点定位,所有由DOF节点控制的运动都基于该当地坐标系统。
3)设置DOF的运动范围。根据装备天线的转动情况设置DOF的运动范围,将天线俯仰设置为0°~93°,方位+185°~-185°。
使用Creator建立的装备车辆三维模型如图7所示,后方竖起的为天线,当操作驱动面板时,天线会在水平和俯仰方向转动,同时,瞄准镜和电视标定镜中的三维视景会发生变化。

图7 装备车辆模型
4 系统验证结果
仿真硬件环境中,电脑CPU为Gen Intel(R) Core(TM) i5-11300H,8 G内存,分辨率1 600×900,软件环境为Windows 10系统,系统运行界面如图8所示。
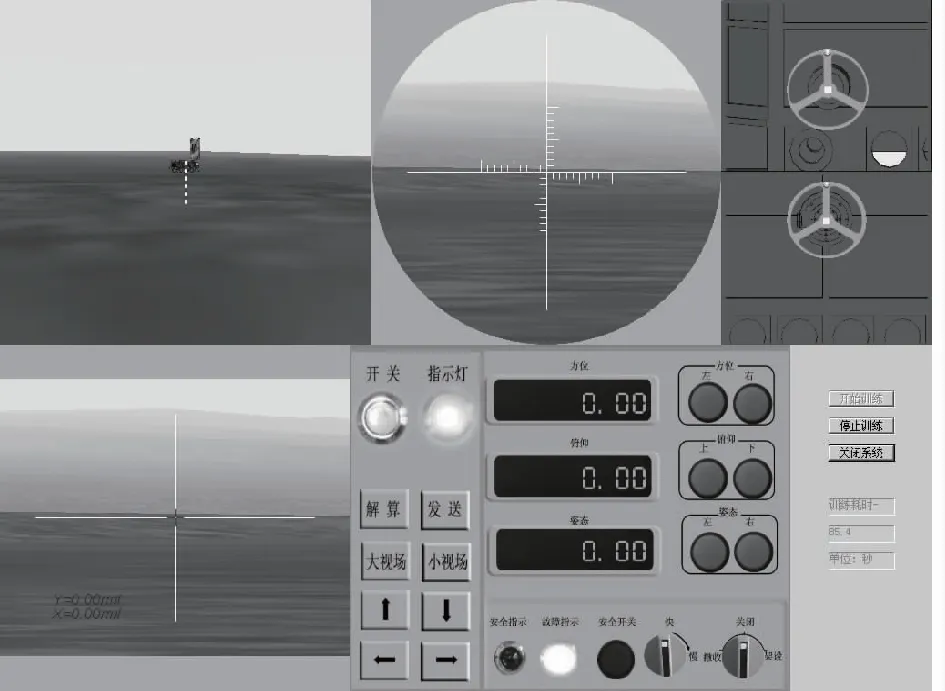
图8 系统运行界面
系统运行界面主要包括装备天线姿态视景窗口、装备天线望远镜视景窗口、装备电视标定镜视景窗口、装备电视标定镜控制面板窗口、装备天线伺服面板窗口、装备天线手柄窗口和辅助操作按钮窗口。
装备天线姿态视景窗口如图9所示。装备天线姿态视景窗口显示装备标定训练时的地形环境、天气环境、光照环境,能够观察标杆位置和天线姿态变化。

图9 装备天线姿态视景窗口
雷达天线望远镜视景窗口如图10所示,窗口绘制望远镜内分划,模拟运用望远镜实现天线标定训练的观察场景效果。
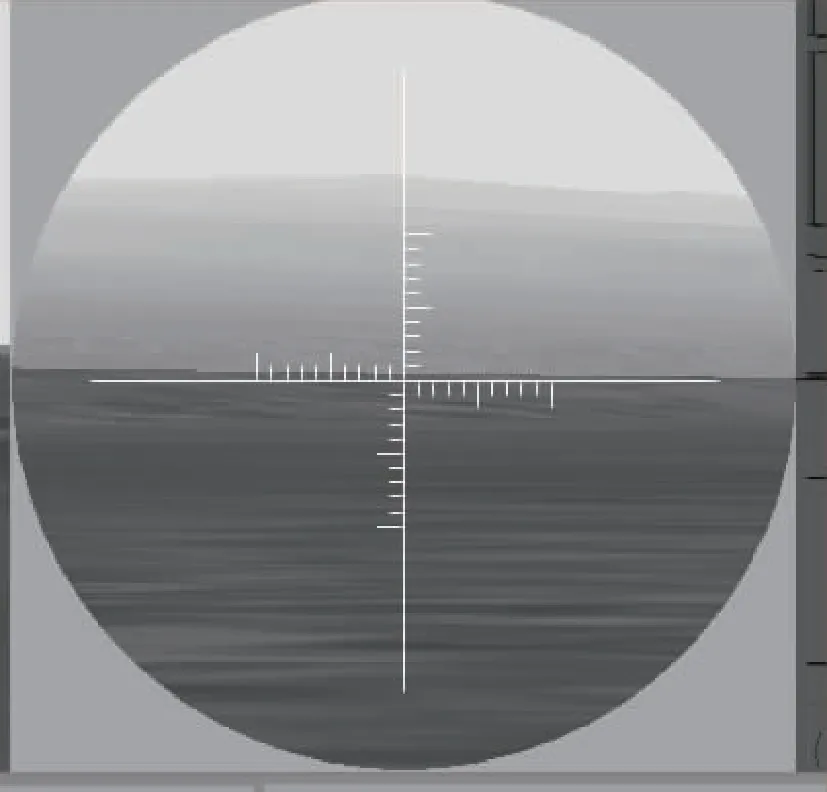
图10 雷达天线望远镜视景窗口
雷达天线伺服面板窗口如图11所示,实现雷达天线伺服面板上的各种按钮仿真,具备天线姿态转动指令处理和码盘值运算功能,能够模拟显示各种码盘值和指示灯。

图11 雷达天线伺服面板窗口
雷达天线手柄窗口如图12所示,窗口仿真显示雷达天线的方向、俯仰手柄外形,能够与用户进行交互,完成天线姿态的微调,并计算雷达天线伺服面板窗口中的雷达天线码盘值。

图12 雷达天线手柄窗口
5 结束语
本系统基于虚拟现实技术开发,通过三维建模软件Creator 和仿真开发软件 Vega实现了装备标定仿真训练的实时视景仿真,仿真结果具有很高的逼真度,为装备模拟训练提供了身临其境的仿真环境,增强了装备标定仿真训练的实时性和训练水平。
