基于ACO+k-means算法的不同天气下驾驶行为分析
2022-08-18朱凯家
朱凯家
(重庆交通大学 交通运输学院,重庆 400074)
交通运输安全是道路交通规划管制的基本要求,近年我国的旅客运输业得到快速发展,给人们带来便利的同时也产生了一定的危害。据交通事故年报统计[1],2019年全国共发生交通事故23万起,造成6万多人死亡,27万多人次受伤。而客运车辆载客量大,一旦发生交通事故,带来的人员伤亡和财产损失都相对较大。研究发现由驾驶员感知失误和判断决策失误引起的交通事故是事故产生的直接原因,从驾驶员的角度出发,国内外学者对驾驶员行车过程的驾驶行为特性展开了一定的研究,GACA S学者[2]利用三轴加速度计将采集到的行车加速度选取k值临近算法进行分析,将驾驶行为分为普通型、激进型驾驶行为。钱宇彬等研究学者[3]选取踏板的操作行为和行驶速度作为研究参数,通过聚类分析,设计一种基于驾驶行为的客车驾驶员换班管理的方法。任慧君等学者[4]提出一种基于聚类融合技术的驾驶行为特征参数的提取方法,Greaves等学者[5]利用GPS数据获取的驾驶数据,并对驾驶人的超速行为信息进行了挖掘。Feng Guo等学者[6]利用线性回归模型识别危险驾驶因子,得出驾驶员性格、年龄是危险驾驶行为的两个重要参数。对驾驶行为分析研究中很少有学者考虑天气因素。
本文考虑到天气因素对公路上车辆能否正常通行和交通安全有着很大的影响,选取不同天气下的客运车辆行驶数据进行分析研究。
1 数据来源与预处理
1.1 数据来源
数据来源于重庆市某一客运公司的营运车辆安全监测系统提供的城际客车行驶数据,全部数据为2019年4月1日至30日的行车数据,采样时间间隔为5 s,具体采样信息包括:车牌号、驾驶员ID、客运线路名称、经度、纬度、采集时间点、行驶车速、方向角、道路限速值等字段,行驶路线为重庆市道路规划的重庆至大足的客运往返路线,如图1所示。
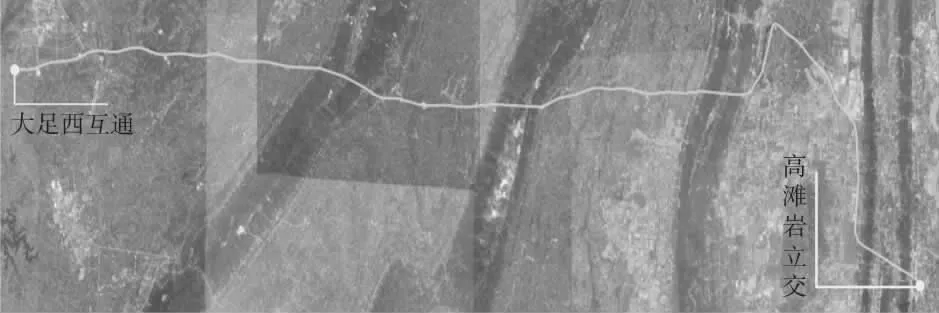
图1 重庆与大足间客运线路Fig.1 Passenger line between Chongqing and Dazu
1.2 数据预处理
在实际数据的采集过程中,由于外界条件的影响和自身设备运行时,都容易产生数据错乱的情况,例如设备故障、数据输入过程出现重复输入、数据重复读取等情况,使用Hadoop对冗余数据进行了检测和处理[7]。
(1)冗余数据处理
①将车辆编号和采集时间作为关键词统计。
②被统计1次的为正常数据,≥1次的为异常数据,进行删除。
(2)缺失数据修复
实验选取车辆行车数据时间间隔为5 s,部分空值数据需要进行修复,选取采集时间和车辆编号为关键词,针对所要研究内容补全车速、时间。参考文献[8]选取移动平均法补全缺失数据。移动平均法基于时间序列Tt,t=1,2,…,n,计算公式如式(1)所示:
(1)
Yt为第t+1时期的观测值,N为拟定的移动平均项,这里取移动平均项为3.
(3)异常数据处理
对GPS定位的客车行驶数据进行分析时,其异常数据主要包括车速和经纬度,由于客车行驶路段为高速公路[9],速度限制为0 km/h≤v≤120 km/h,故剔除此范围外的数据。根据此次客车行驶路段相同,但记录的起终点位置不完全相同,故选用共同路段的经纬度南北纬度29.416 31°至29.710 25°,东西经度105.683 47°至106.504 12°,将此范围外的数据进行清洗删除。
(4)数据规格化
数据规格化就是将数据同时规划到一定的比例范围内,减少因属性不同而带来的分析误差[10]。本文选用的是最大最小规格化方法。该方法利用最大最小值进行转换,设minA和minB分别为属性A的最小值、最大值,将A的其中一个属性值v映射为v′,具体计算公式如式(2).
v′=
(2)
2 不同天气下的驾驶数据分析
重庆至大足路线的客运车辆行驶数据进行分析时,基于重庆春夏之交夜雨尤甚的天气特征,通过天气查询网站获得重庆各地区历史天气信息,进行查询可得到重庆市4月份的天气状况如表1所示。

表1 重庆2019年4月天气情况
2.1 运行车速分布
为了研究天气状况与高速公路客运车辆驾驶员驾驶行为之间的影响关系,通过我国气象部门对重庆市的标准划分天气状况分类,选取不同天气状况下同一驾驶员的驾驶车辆运行数据进行分析,选取4月7日、4月9日、4月17日、4月20日数据,对应天气状况分别为:晴天、小雨、阴天/多云、中雨。四种天气下的车速变化情况如图2-图5所示。
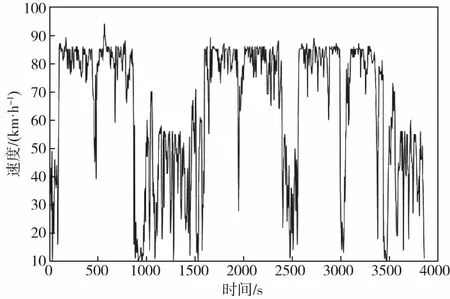
图2 4月7号(晴天)车速变化Fig.2 Change of speed on April 7(sunny day)
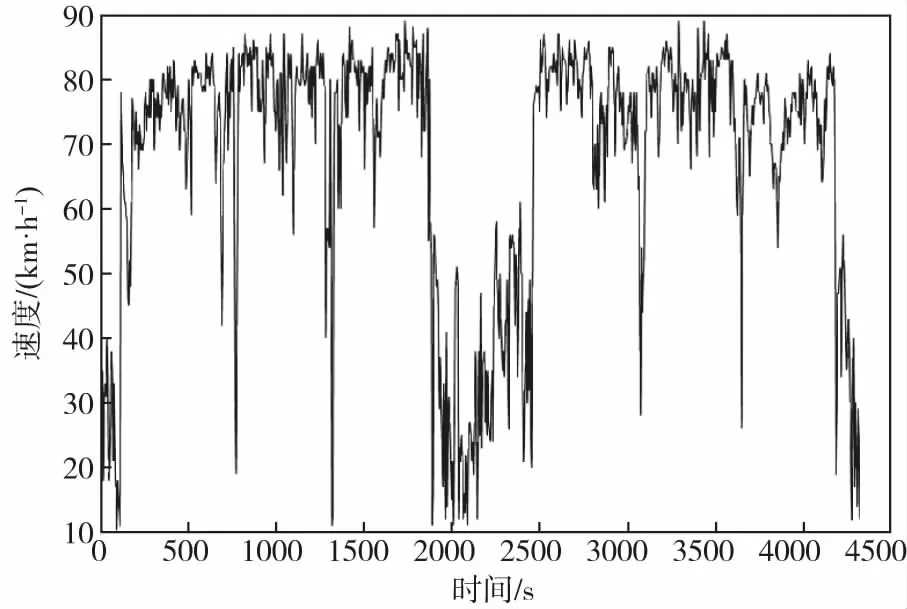
图3 4月9号(小雨)车速变化Fig.3 Change of vehicle speed on April 9(light rain)

图4 4月17号(阴天/多云)车速变化Fig.4 Change of vehicle speed on April 17(cloudy/cloudy)
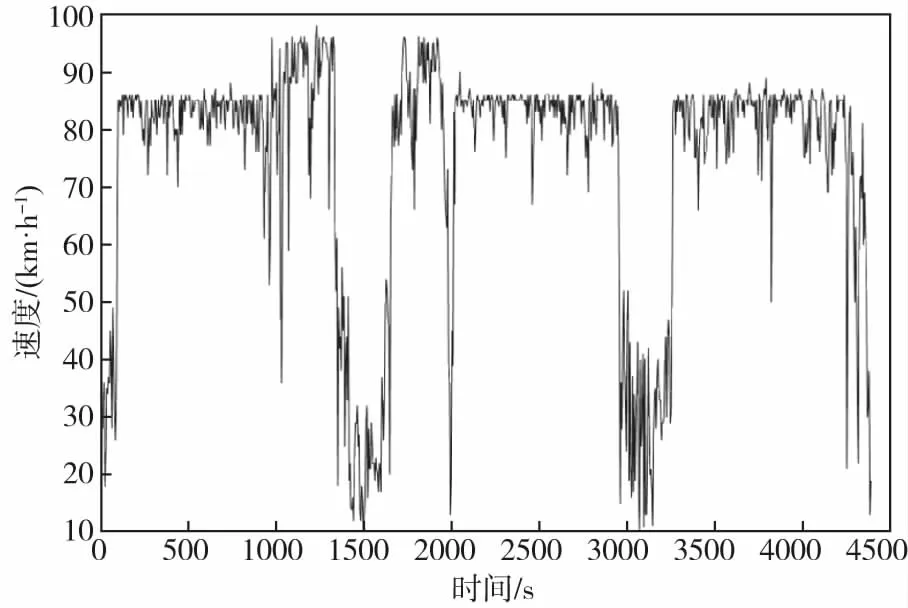
图5 4月20号(中雨)车速变化Fig.5 Change of vehicle speed on April 20(moderate rain)
2.2 不同天气下的驾驶参数分析
对于同一位驾驶员在不同天气下驾驶车辆的平均车速(km·h-1)、平均加速度(km·h-2)、速度最大值(km·h-1)、速度最小值(km·h-1)、加速度最大值(km·h-2)、加速度最小值(km·h-2)、车速标准差等数值计算如表2所示。

表2 不同条件下的驾驶参数值
研究表明,驾驶员行驶过程中行车速度与行车过程的平均速度值相差越大、加速度变化幅度越大,则车辆行驶越不稳定。由表2可知,在天气晴朗的条件下,客运车辆在高速公路上正常行驶的平均行驶车速为73.58 km·h-1、速度标准差为23.81;在阴天/多云天气下的平均行驶车速为72.16 km·h-1、速度标准差为25.24;小雨天气下的平均行驶车速为67.81 km·h-1、速度标准差为19.93;中雨天气下的平均行驶车速为63.95 km·h-1、速度标准差为21.75;同晴天相比,阴天/多云、小雨、中雨天气下的客运车辆整个行驶过程中平均行驶车速分别下降了1.9%、7.8%、13.0%.
行驶过程加速度的变化情况为:晴天平均加速度为-0.02 km·h-2;阴天/多云天气平均加速度为-284.41 km·h-2;小雨天气平均加速度为-0.15 km·h-2;中雨天气车辆平均加速度为0.11 km·h-2.由以上可分析得知:天气状况晴朗时,客运驾驶员驾驶车辆的整体速度相对较高,但加速度的变化幅度也相对大一些。阴天/多云平均车速值低于晴天,但速度标准差高于晴天,可推出在行车稳定性方面阴天/多云低于晴天车辆行驶,由车速占比也可知阴天/多云时车速分布80 km·h-1以上占比高达65%.
小雨和中雨天气下整体行车速度而两个天气状态下的整体行驶平均车速相差不明显,表明雨天时驾驶员明显谨慎度增加,行驶车速平稳性较好。由此可猜测虽然交通事故在雨天的发生率高一些,但是小雨、中雨条件下车速的稳定性并非明显低于晴天。
3 聚类分析
3.1 ACO+k-means聚类算法
k-means属于一种基于划分的聚类方法。对给定的样本集,样本之间的距离大小是划分类簇的标准,首先从n个样本中任意选取K个聚类中心,将距离聚类中心较近的数据分到该类簇,一次聚类结束之后,再重新计算每个获取新聚类的聚类中心,依次重复聚类中心的选取迭代过程,直至聚类中心不再发生变化,实现簇内的距离较小,簇间距离较大的过程[11]。形象原理如图6所示。
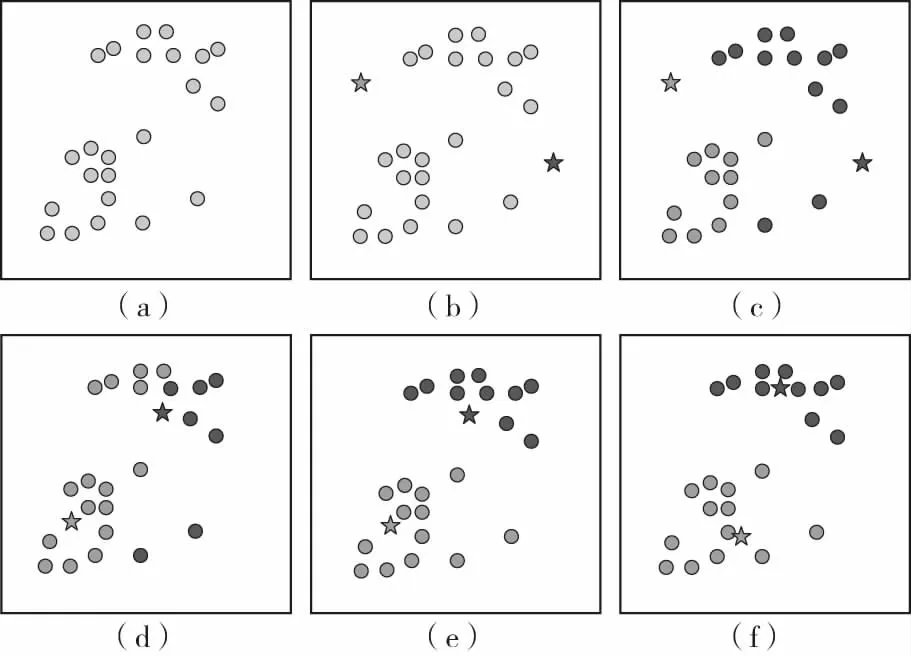
图6 k-means算法聚类原理Fig.6 K-means algorithm clustering principle
理论上k-means算法受孤立点的影响,当噪声和孤立点数据较多时,k-means算法受到极端数据的影响容易导致聚类算法不能够具有较强的鲁棒性或准确性,本文1.2节进行了数据预处理,完成了异常数据清洗和缺失数据增补,故可不考虑数据噪声和孤立点的因素,但由于数据量较大,初始聚类中心随机选择进行迭代过程会有较大的工作量,因此需要在聚类中心的选取上做出改进。
蚁群算法(Ant Colony Optimization,ACO)是一种用来寻找优化路径的概率型算法。基本原理为:蚂蚁在运动过程中会产生一定的信息素,而信息素的总量与所走的路径长度有关,蚂蚁在有多条路径到达信息源时,初始时蚂蚁随机选取一条道路,并在该道路上留取信息素,相同时间内越短的路径上经过蚂蚁数量较多,累积的信息素浓度越大,从而吸引更多的蚂蚁进行较短路径的选择,该过程也称为蚂蚁的自催化行为(autocatalytic behavior),是一种正反馈机制[12],蚁群觅食路径选择如图7所示。
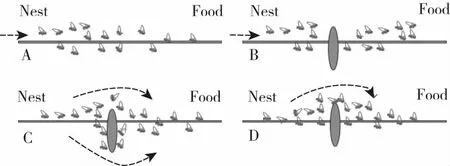
图7 蚁群觅食路径选择Fig.7 Foraging path selection of ant colony
(3)
上式中allowedk={0,1,…,n-1}表示蚂蚁k到达食物源允许选择的路径,ηij为路径(i,j)的能见度因数,ηij=1/dij,ɑ为信息启发式因子,代表蚂蚁在路径搜素中随机性因素作用的强度。β为期望启发式因子,反映蚁群在搜索道路信息素的确定性因素的强弱。
经过t时间,各路径上的信息素量根据式(4)、式(5)调整。
τi,j(t+1)=ρ·τij(t)+Δτij(t,t+1)
(4)
(5)

ACO+k-means聚类算法是在k-means的基础上融合蚁群算法的改进方法。改进原理为:用k-means算法进行聚类时,将数据视为具有不同属性的蚂蚁,而聚类结果即是蚂蚁所要找的“食物源”,所以数据聚类过程就可以看作是蚂蚁寻找食物源的过程,选择k-means算法将数据分为k个类簇时,认为存在k个食物源,食物源的位置跟随蚂蚁位置变化而变化。这样通过蚁群与食物源之间的相互变动,实现聚类的过程。根据蚂蚁所在蚁群中心提供的信息素的原理,加强了聚类过程中局部空间区域的搜索能力,避免了聚类中心局部最优的现象。基于蚁群算法改进后的kmeans算法流程如图8所示。
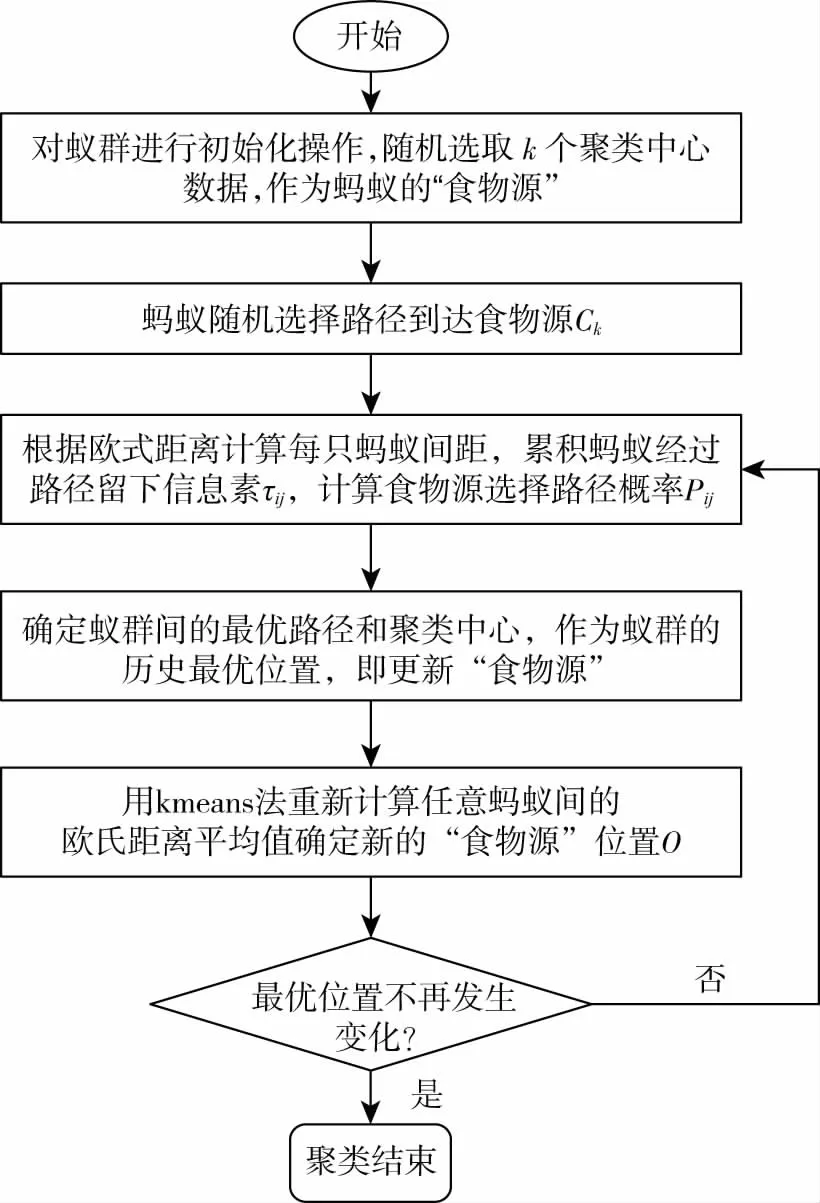
图8 ACO+k-means算法流程Fig.8 ACO+ K-means algorithm process
3.2 驾驶数据聚类
由于驾驶行为的稳定性主要体现在车速、加速度的分布及变化趋势[16],故对不同天气下的车速进行聚类分析,等同于对驾驶员的操作行为进行分析。2.2节中对晴天、小雨、阴天/多云、中雨天气下的驾驶参数进行分析时,发现小雨和中雨天气下车速变化规律相似,故小雨和中雨天气可归为一类。进行参数选取时,经查阅文献资料选取李士勇教授通过仿真获得蚁群算法优化后的参数,信息启发式因子ɑ=1,期望启发因子β=5,信息素轨迹持久性因子ρ=0.7,轨迹强度的初始量设为τij(0)=0,效果最优,故本文按上述参数值进行聚类,聚类个数k为3.
对阴天/多云、晴天、中雨三种天气下的车速、加速度聚类分析,聚类结果如图9所示,由晴天时的实际车速相对较大、加速度相对较小,而雨天的车速相对较小、加速度较大,阴天时的车速和加速度都相对平稳的聚类规律,可知date1、date2、date3可认为分别是阴天/多云、晴天、中雨天气下的行驶数据,按照速度越大、加速度越大驾驶行为越激进的判断原则,将三种天气下的驾驶行为分为一般激进型、平稳型、偏激进型的三种驾驶行为。

图9 速度、加速度聚类(k=3)Fig.9 Clustering of velocity and acceleration(k=3)
3.3 算法对比
选取k-means聚类算法、根据隶属度进行聚类的FCM算法将归一化后的车速及加速度进行聚类,得出k-means算法的三个聚类中心点分别为C1(0.247,0.362)、C2(0.461,0.573)、C3(0.729,0.511),FCM算法聚类中心点分别为C1(0.351,0.397)、C2(0.514,0.462)、C3(0.692,0.403),ACO+k-means算法聚类中心点C1(0.247,0.362)、C2(0.461,0.573)、C3(0.729,0.511).计算各算法聚类中心间距及迭代次数,结果如表3所示,由表3可知,改进后的k-means算法得到各簇聚类中心间距大于等于k-means算法和FCM算法,满足簇内距离越小、簇间距离越大,聚类效果越优,且迭代次数最少,聚类时间最短。
4 结束语
对不同天气下的驾驶数据聚类分析,可以为驾驶行为分类提供依据,有助于交管部门开展针对性的安全培训,减少交通事故的发生。
(1)考虑天气因素的影响,对于同一位驾驶员在不同天气下驾驶车辆的平均车速、平均加速度、车速标准差等数值进行了分析。
(2)根据重庆市某一客运公司提供的真实客车行驶数据,数据量较大,相对于传统的调查方式具有可靠性和真实性。
(3)提出一种基于蚁群算法改进k-means的聚类算法。通过聚类分析将阴天/多云、晴天、中雨三种天气下的驾驶行为分为一般激进型、平稳型、偏激进型三种驾驶行为,并用FCM算法、k-means算法进行聚类结果对比,证明改进后得到的ACO+k-means算法能加快聚类中心点的选取,减少聚类时间,聚类效果更优。
不足之处:在对天气因素下的驾驶行为进行分析时,未考虑具体的道路环境,在实际行车过程中,道路环境和天气因素均影响到驾驶员的驾驶行为,故后续需要更多学者深入研究。
