移动三维激光扫描仪在建筑工程不动产测绘中的应用
2022-08-17刘广彬密兴刚宋忠强王宇光
李 通 刘广彬 密兴刚 邹 昂 宋忠强 王宇光
(济南市勘察测绘研究院, 山东 济南 250013)
0 引言
不动产(俗称房地产)是指具有权属性质的地块和其地上建筑物的总称。不动产测绘主要包括地籍调查、地籍测绘、房产测绘、面积量算以及变更测量等内容。在不动产登记过程中,房产测绘数据的挂接是其重要工作内容之一。房产测绘的主要目的是获取房屋和楼幢的分层平面数据、分户平面数据及按照相应规则划分的各个房屋基本单元的面积数据。房产测绘又包括房产实测绘和房产预测绘,其中房产预测绘依据设计施工图纸即可完成测量数据采集,而房产实测绘需要对竣工后的现状房屋进行外业实测来获取房屋内各空间各基本单元及共有建筑部位的边长等相关数据。传统的房产实测绘方法是采用激光测距仪进行数据采集,存在外业人员数量多、采集数据时间长、特征边长数据易遗漏、无法准确测量异形建筑等缺点。
移动手持式三维激光扫描仪是近年来激光扫描仪及定位定姿设备集成和小型化的典型产品。扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,以实现扫描仪的自主定位和导航[1]。手持三维激光扫描仪具有速度快、精度高、体积小、重量轻、携带方便、外业数据采集时只需一人手持等优点。本文以建筑工程房产实测绘为例,介绍GeoSLAM ZEB-REVO手持三维激光扫描仪在房产实测绘中的技术流程和方法,并与传统的测量方法进行精度和效率对比。
1 原理与技术方法
1.1 工作原理
GeoSLAM ZEB-REVO手持三维激光扫描仪是一款使用简单、智能且专业的手持式新型三维激光扫描仪,主要由扫描手柄、数据记录仪、电源仓、连接手柄和记录仪的数据线及相关数据处理软件组成。该设备以即时定位与地图构建技术(simultaneous localization and mapping,SLAM)为核心,通过自身内置的传感器结合外部传感器对自身进行位置修正和环境地图构建,可以在无全球导航卫星系统(global navigation satellite system,GNSS)信号的环境下获取动态测量数据和周边三维空间点云信息,并进行三维点云的自动化拼接,实现对小空间及大空间进行高精度高效率的扫描作业[2]。
1.2 技术方法
1.2.1测量的主要内容
建筑工程房产实测绘是对获得规划核实证后的建筑单体进行据实量测,检核现场建筑单体的房屋布局、墙体尺寸等是否与规划图纸或图审图纸一致,并对这些数据进行处理,进而获取各建筑单体房屋的基本单元面积、用途及分层分户平面图,作为不动产登记的基础测绘数据。
1.2.2测量的技术流程
结合不动产测绘的生产实际,利用GeoSLAM ZEB-REVO手持三维激光扫描仪进行建筑工程房产实测绘,主要包括现场踏勘、选择起始扫描点、采集数据、点云处理等工作流程,如图1所示。外业采集数据时,因手持移动测量系统不需要架站,也就不需要设计测站位置,只需根据建筑平面图等资料及现场情况规划一条测量路线,考虑到移动扫描系统移动过程中通过不断建立优化前端和后端的空间约束关系来实现姿态调整和构图,在规划路线时要注意所经过房屋空间的特征复杂度和行进姿态的稳定,沿着测量线路完成点云的扫描和自动拼接。点云数据处理时首先对点云数据进行压缩,提高后期数据处理的效率,然后进行点云配准,将多次扫描的点云数据进行拼接,再根据各建筑部件点云高度及现场拍摄的照片进行去噪,将无用的点云信息比如门、电线等裁剪掉,然后再进行重采样、切片等流程。内业编辑时,通过格式转换,在切片平面上提取墙体要素点,进行墙体线拟合生成墙体实测边线。

图1 主要流程
1.2.3墙体边界拟合
手持三维激光扫描仪获取的数据为三维点云数据,直接使用会导致数据处理效率降低。在房产测绘中,高程数据作为无关信息可通过将三维数据向XOY平面投影来剔除,进而获取二维点云信息。为获取较优的目标平面,方便墙体边界的提取,首先需要进行房屋内部点云平面的粗略提取,即根据所采集点云数据的最大高度值Zmax和房屋内部其他部位点云平面的最大高度值Z的差值d,剔除现场杂物数据,只保留地面、顶板、墙体、门窗等平面点云数据;然后根据地面及顶板的各自高度差值Wdiff剔除地面和顶板数据;接着进行墙体平面点云数据的精提取,即利用墙面的最大高度值Pmax及门窗的最大高度值Lmax与点云数据的最大高度值Zmax的差值的差异性,提取出精确的墙面点云数据;最后将精确的墙面点云数据进行切片并投影到XOY平面获取房屋所有墙面的二维点云数据。
经过上述步骤获得的墙面二维点云边界规则简单,为精确获取墙体的轮廓边界,可直接采用随机抽样一致算法(random sample consensus,RANSAC)对墙面二维点云数据进行直线拟合。RANSAC直线拟合算法具有较强的稳健性,可剔除粗差异常值,适用于大部分的直线拟合场景,如点云数据处理等。该算法的实质为假设和检验:假设随机采样数据都为内点,利用随机采样数据计算模型参数;通过其他点对估计的模型参数进行检验,根据设定的距离阈值K,求取包含内点数量最多的直线模型[3]。利用RANSAC算法求解直线几何参数的过程为:①输入直线数据;②计算所需采样次数n;③模型假设阶段:随机选取两个二维点求解直线模型,然后计算采样剩余集到该直线的距离;④根据设定的阈值判断余集点是否为内点;⑤根据第④步的结果计算内部点的数量;⑥判断迭代次数是否小于n,若小于,返回第③步,否则进行下一步;⑦选着包含内部点最多的集合;⑧重新计算直线模型参数。
2 实例研究
2.1 项目概况
本文以济南市历城区二环东路以东、环湖路以西华山片区某住宅楼地下室为例,利用GeoSLAM ZEB-REVO手持三维激光扫描仪进行不动产实地测绘。经实地踏勘及相关资料分析,该建筑单体已完成规划竣工核实,现场房间紧凑、开门情况、杂物情况良好,便于手持三维激光扫描仪量测。
2.2外业数据采集
启动扫描仪进行作业前,首先对现场进行踏勘,并对现场情况进行拍照留存,方便后期的内业点云去噪处理;然后规划各单次扫描路线,标记扫描起始点,规划路线时需要考虑扫描仪本身的性能(测程范围、最大仰角及保持测量精准度的单次扫描时间),确保建筑墙体面在测程范围和仰角包含角度内,同时需要保证前后两次扫描的区域具有一定的重叠度,单次扫描时间控制在300 s以内;为提高点云数据配准的精度,按照规划路线单次扫描完毕后,回到现场标记的起始点,完成各单次闭路扫描。
2.3 点云数据处理
2.3.1点云数据压缩
三维激光扫描仪扫描目标物所获取的点云数据量一般比较大,而对于建筑物室内空间场所的扫描,获取的数据量更大。为提高后期点云数据处理的效率和精度,本文采用组合的点云压缩算法[4],即首先利用包围盒算法对点云进行不均匀分割,然后在各分割区内再利用基于曲率的压缩算法进行数据压缩。通过设置不同的阈值来实现点云数据不同程度的压缩。图2展示了点云精简前后的对比效果。
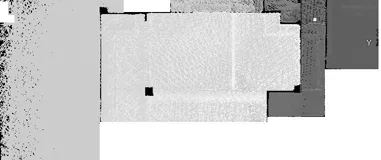
图2 点云数据压缩前后密度对比(Cyclone俯视图)
2.3.2点云配准
目前常用的点云配准方法包括基于点云的配准和基于目标的配准[5]。基于点云的配准即根据扫描重叠区域同名点进行配准拼接,将不同参考坐标系下的点云统一到同一坐标系统下;基于目标的配准则是通过扫描赋有实际地理坐标的靶标,将完成拼接后的点云整体配准,完成点云的绝对地理坐标转换。房产测绘中根据空间墙体之间的相对位置关系即可完成房屋尺寸的量取,故数据处理时只需利用Trimble Realworks软件自动完成基于点云的配准,无须进行绝对坐标转换。配准后的点云数据如图3所示。

图3 配准后的点云
2.3.3点云去噪及重采样
在利用手持三维激光扫描仪对房屋内部进行扫描时,不可避免地会将门窗、人体、堆积杂物、电线、天花板、相邻无关建筑部位等噪声记录下,影响墙体边线提取的精度。为此,在进行墙体切片前需要采用Trimble Realworks软件的“高度阶化色彩”工具将不同高度的房屋内部建筑构件进行高度色彩显示,然后结合现场照片和各构件点云平面的高度以及之间的高度差将门窗、杂物、天花板等信息裁剪掉,并对墙体周边的噪声采用单点少量去噪,最大限度地保留所测建筑单体的墙体结构特征。
采用分阶段拼接扫描,采集的点云数据量一般比较大且密集,在各阶段重叠区域内会产生数据冗余,而进行墙体边线拟合时并非点云越密精度越高,为提高后期数据处理的效率和精度,需要利用Trimble Realworks软件重采样工具将点云数据进行抽稀。去噪后的墙体三维特征信息如图4所示。
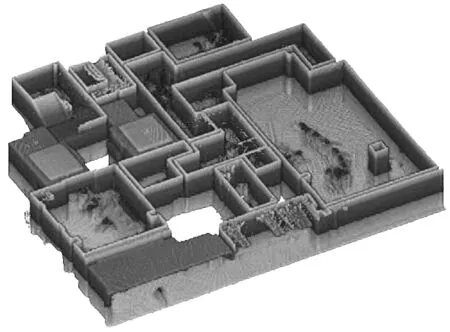
图4 去噪后的墙体特征信息
2.3.4点云切片
准确获取房屋的室内墙体截面信息是进行墙体边线拟合的基础。将去噪后的las格式点云数据导入Cyclone软件,在软件中调出XY参考面,并对该参考面的网格大小等参数进行设置,通过切片沿法线方向的升降工具将XY参考面定位到某一墙体高度位置,然后设置切片的厚度参数,完成点云切片。
2.4 墙体边线拟合
基于切片的二维点云数据,采用RANSAC直线拟合算法对墙体边界线特征进行拟合,提取墙体的轮廓线。由于采集的墙体特征点不一定严格地位于现场墙体边线上,导致拟合的各墙体边线不能规范化相交,需要采用自适应的强制正交规则化算法[6]对拟合的墙体边线进行规范化的调整,恢复墙体之间垂直等相交关系。二维点云数据直线拟合后的墙体轮廓如图5所示。
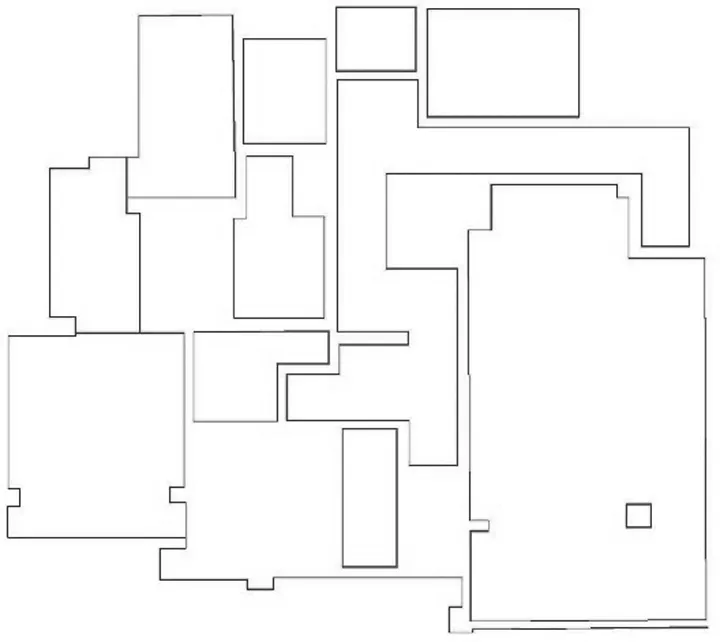
图5 房屋实测平面图
2.5 精度及效率分析
(1)精度分析。为了验证手持三维激光扫描仪方法的可靠性,将墙体二维点云数据拟合后的平面边长数据与Leica DISTOTMX4手持式激光测距仪所测的边长数据进行对比。随机选取10条边进行对比误差分析,分析结果见表1。

表1 边长尺寸对比 单位:m
由建筑物边长中误差公式计算可得,建筑物边长中误差为0.021 m,建筑物间距满足《房产测量规范》(GB/T 17986—2000)精度要求。
(2)效率分析。与传统的手持测距仪测量方法相比,本项目外业数据采集时间明显缩短,测量用时约600 s,而传统作业方法用时约1 200 s;外业人员投入明显减少,新方法只需1人手持仪器即可完成外业扫描,而传统作业方法需要2人,其中1人测量,1人在外业草图上记录数据。内业数据处理方面,点云数据处理和内业编辑共用时约1 800 s,共需1人;传统内业处理(根据外业草图校对及绘图)用时约1 500 s,共需1人。根据作业人员人数统计总体作业时间,明显手持三维激光扫描仪作业效率更高些。
3 结束语
本文利用手持三维激光扫描仪对建筑工程不动产实测绘进行了试验,并与传统的作业进行了精度及效率对比。研究结果表明:手持三维激光扫描仪外业采集数据自动化程度高,外业人员投入少,提高了作业效率;在测量精度方面,能够满足相关规范要求,可以作为新的测绘方法用于不动产测绘实际生产中;同时,可以获得丰富的三维点云数据,为后期不动产三维建模提供数据支撑。随着手持三维激光扫描仪的测程及测量精度的进一步提升,该设备的应用前景会更加广阔。
