平贝母收获挖掘设备研究现状与发展趋势*
2022-08-17李三平包纹全吴立国
李三平,包纹全,吴立国, 2
(1. 东北林业大学机电工程学院,哈尔滨市,150040; 2. 国家林业和草原局哈尔滨林业机械研究所,哈尔滨市,150086)
0 引言
中药对于贝母的研究最早可追溯至汉代,2015年版《中华人民共和国药典》收录了百合科贝母属中包含川贝母、平贝母在内的八个植物种,其主要功效均为祛痰平喘,其中川贝母药效最佳,药用历史最久,应用最为广泛。但川贝母的人工栽培技术尚不成熟,目前主要以野生品为主。平贝母可人工种植,栽培难度相对较低,产量较高,与川贝母在临床上具有相同或相似的药效,且具备抗氧化、抗溃疡、抗炎、抗敏和调节黑色素等独有的药理作用[1-2]。目前,平贝母已在东北三省70多个市县大面积种植,已经成为了林区农户的主要经济来源。
平贝母在我国东北已有近40余年的种植历史,但平贝母机械化采收设备的研发仍处于初级阶段。现如今,我国的平贝母采收作业仍采用人工挖掘、细捡,人工筛分、清选的半机械化收获方式。这一过程劳动强度大,费用高,生产效率低,药农往往无法在最佳采收期完成采收作业,从而导致该产业的经济效益大打折扣。随着市场需求的逐年增加,平贝母机械化采收设备的落后已经成为制约整个行业经济链条发展的瓶颈[3-4]。因此,顺应科技发展的潮流,加快平贝母机械化采收设备的研发对促进农村经济协调发展具有重要的意义,对推动该产业全面健康可持续发展,确保药农增收,振兴林区经济具有重要的战略作用。
对国内外根茎类作物收获机、平贝母收获机、根茎类作物挖掘铲进行比较与分析,并针对平贝母种植过程农艺要求、收获作业工艺规范对平贝母采收设备机器挖掘铲现阶段存在的问题及未来发展趋势进行了展望,以期研发出满足行业需求的平贝母采收设备,推动平贝母种植业全过程机械化的进程,提高药农的经济收入,促进林区经济的蓬勃发展。
1 根茎类作物收获机的国内外研究现状
目前,国外尚无与平贝母收获机械相关的研究成果。但国外马铃薯、大蒜、花生、胡萝卜等先进的根茎类作物收获机研发生产技术对开发新型平贝母收获机具有重要的借鉴意义。
美、德、日、俄等马铃薯主产国已经实现了马铃薯收获作业的全过程机械化,形成了采用单个环节机械收获或用联合收获机收获的两种收获模式[5-6]。代表机型为德国470自走履带式马铃薯收获机[7],该机呈现出极强的专业化、精细化、人性化特点,与德国大规模精细化农场种植模式相适应。
欧美日韩等国采用的大蒜收获机械主要有两种,分别为分段式大蒜收获机械和自走式大蒜联合收获机。日韩、西班牙等国着重于研发自走式小型联合收获机[8-10]。其中较为典型的机械,如西班牙打捆式大蒜联合收获机,该机采收效率高,不伤蒜,对极端作业环境适应性强。美国、加拿大等国着重研发可兼收马铃薯等其他根茎类农作物的大型全程分段式收获机[11-13]。例如GW4400型四行大蒜挖掘铺条机和GL2400型两行大蒜捡拾机。上述两种机械配套使用可高效完成大蒜的收获作业。
美国是世界上花生种植业机械化水平最高的国家,现已实现了种植、采收、加工全过程机械化,形成了联合收获、两段式收获、分段式收获三种模式。其中较为典型的两段式收获机械为Pearman花生挖掘铺放机,较为成熟的联合收获式机械为KMC3384/3386花生联合收获机[14-15]。
近年来,欧美等国胡萝卜收获机的研发制造技术已经趋于成熟,ASA-LIFT、Weremczuk、Kubota、GRIMME等类型的胡萝卜收获机已经开始走向并即将席卷国际市场[16-17]。其中具有代表性的机械为德国GRIMME SP 200胡萝卜收获机。该机为自走式双行收获机,其行间工作深度可单独调节,机身结实,配有阿萨利防滑系统,可在粘性土质中使用,具有很强的环境适应能力[18]。
相比于其他鳞茎类作物的收获机械,我国对马铃薯收获机械的研究较早,国内的马铃薯收获机械制造厂家经过40余年的发展,生产研发过程已经趋于完善,产品愈发成熟。当前我国的马铃薯收获机正朝着联合作业方向、大型化、集成化方向发展[19-20]。其中具有代表性的机械为4UZL-1型小型自走式薯类联合收获机。该机具有环境适应性强,伤薯率低,收获效率高,作业成本低等特点,可较好地满足国内市场对马铃薯收获机械的需求。
国内半夏收获机目前正朝着节能化、高效化、专业化方向发展。甘肃农业大学的李海等[21]针对目前国内半夏收获机体积大、工作效率低、筛分精度差等缺点,设计了一种节能型半夏收获机。其创新点在于为筛桶配置了筛筒拍打装置,该装置可缓解筛孔的土壤壅堵现象,提高作业的精度。
国内外几款根茎类作物收获机械的设备优势、收获模式、机械类型如表1所示。
综上所述,国内外根茎类作物的收获模式大致可划分为分段收获、联合收获两大类,收获机械大致可划分为联合收获机、自走式收获机、牵引式收获机三大类。林药平贝母主要集中在我国东北的东部山区,且多为小地块种植,地块不平整,该地区四轮拖拉机已经普及,所以目前我国东北地区的平贝母收获机械多为与液压拖拉机配套使用的中小型牵引式收获机,收获模式为人力与机械相互配合的分段式收获。随着市场需求的逐年扩大,现行的收获机械已经不能满足行业的需要,开发具有推广意义的新型平贝母收获机械势在必行。依据平国内外其他根茎类作物收获机的研发经验及平贝母的种植面积相对较小这一现状,研发可兼收其他作物的小型自走式联合收获机不失为一种可行的发展思路。

表1 国内外几款根茎类作物收获机械Tab. 1 Several root crop harvesting machinery at home and abroad
2 平贝母收获机的研究现状
国内对平贝母收获机械的研究始于程立杰等[22]设计的SBC-1型平贝母收获机,该机械以人工起收平贝母的工艺流程为依据,提出了机械操作的工艺过程,并根据机械操作的工艺过程,设计了与之相匹配的机械组成机构。但该机的研究止步于理论阶段,未能制造样机,进行田间试验。
山东曲阜融兴机械设备研制的多功能根茎药材挖掘机采用滚筒筛的方式对输送过来的贝土进行分离,提高了贝土的筛分效率,解决了振动筛筛分不彻底和易堵塞的问题。但需要的升运转速过大,易造成平贝母的损伤,且不能实现滚筒筛的无级调速,推广应用较少。
丁建民[23]为了解决现有的根茎类药材收获机适应性低,稳定性差的问题,结合国内根茎类药材的农艺收获要求设计了新型快速根茎类药材收获机。该机配备有两段式链条筛,可在升运过程中高效快速地完成药土分离作业。该机构作业速度可调,筛分精度高,伤药率低,极大的减小了收获机的体积,提高了整体结构的稳定性。经性能试验测得,该设备平均生产率为0.2 hm2/h,药材损失率为3.10%,满足根茎类药材收获工艺要求,但在土壤粘度较大的环境中工作时,链条筛存在严重的土壤壅堵现象,这会对药土分离作业的质量产生极大的影响,因此该机未能在我国东北的平贝母种植区域被推广。
2015年,宋江等[24-25]在经过大量的实地调查后,基于平贝母的种植工艺规范研发了4B-1200型平贝母收获机。该机由刮土机构、单层振动式筛分装置、带栅条的条形平面铲、筛下贝土输送螺旋等主要部件组成。刮土铲的上缘采用圆弧式设计,可防止土壤从铲顶溢出。单层振动式筛分装置解决了摆动式筛分装置在筛分过程中存在的筛分精度差、漏筛率低的问题,但该装置无法满足按照平贝母的尺寸大小进行等级分级的工艺要求。筛下贝土输送螺旋将分筛后的土壤输送至垄沟,降低继续种植时的整地难度。该机以手扶拖拉机作为动力源,提高了林区手扶拖拉机的利用效率。经样机试验测得,该机的平贝母损失率≤4.90%,伤贝率≤4.10%,满足行业标准规定,但该机在山地丘陵地区工作时仍存在转弯性能差、灵活度较低的问题。
2017年,王密等[26-27]对4B-1200型平贝母药材收获机进行了改进设计。新型4B-1200型平贝母收获机采用链条刮板式反向升运器,该机构可高效平稳地完成贝土输送作业,降低该过程中的平贝母损伤率,但同时也存在动力不足、堆土、皮带侧滑等问题。为解决单层振动式筛分装置无法对平贝母进行的等级分级的问题,新机型配备了双层振动式等级筛分装置,但该机构的工作效率较低,在高强度作业时存在堵筛问题。为解决这一问题,该项目组将振动式筛分装置替换为滚筒筛式分离装置。改进后新机型的平贝母损失率、伤贝率分别降低至3.80%、2.90%,但滚筒筛式分离装置存在筛分不彻底的问题,收集装置内的土壤杂质较多,仍需人工进行二次筛选,故限制了新机型的推广应用。
为解决平贝母采收机械化水平较低的问题,马川[28]依据平贝母的种植工艺、物理特性设计了一种平贝母收获机(图1)。该机由固定式平面挖掘铲、带刮板的升运链、调高地轮、双层振动筛等部件组成。在挖掘深度为87 mm,运行速度为3.35m/s的条件下,该机的平贝母损失率、伤贝率低至1.75%、1.71%。该机械整体结构简单,易于操作;采用链传动,安全性高,易于维护;使用拖拉机作为动力源,提高了林区拖拉机的利用率。但该机未配置刮土装置,在作业时需要使用其他设备刮去覆土层与盖头粪,应用时存在一定的局限性;使用调高地轮调节挖掘铲的工作深度时会使挖掘铲的入土角发生变化,影响挖掘铲的工作性能;升运链直接裸露在外,前端容易直接与土壤接触产生磨损,降低机构的使用寿命。
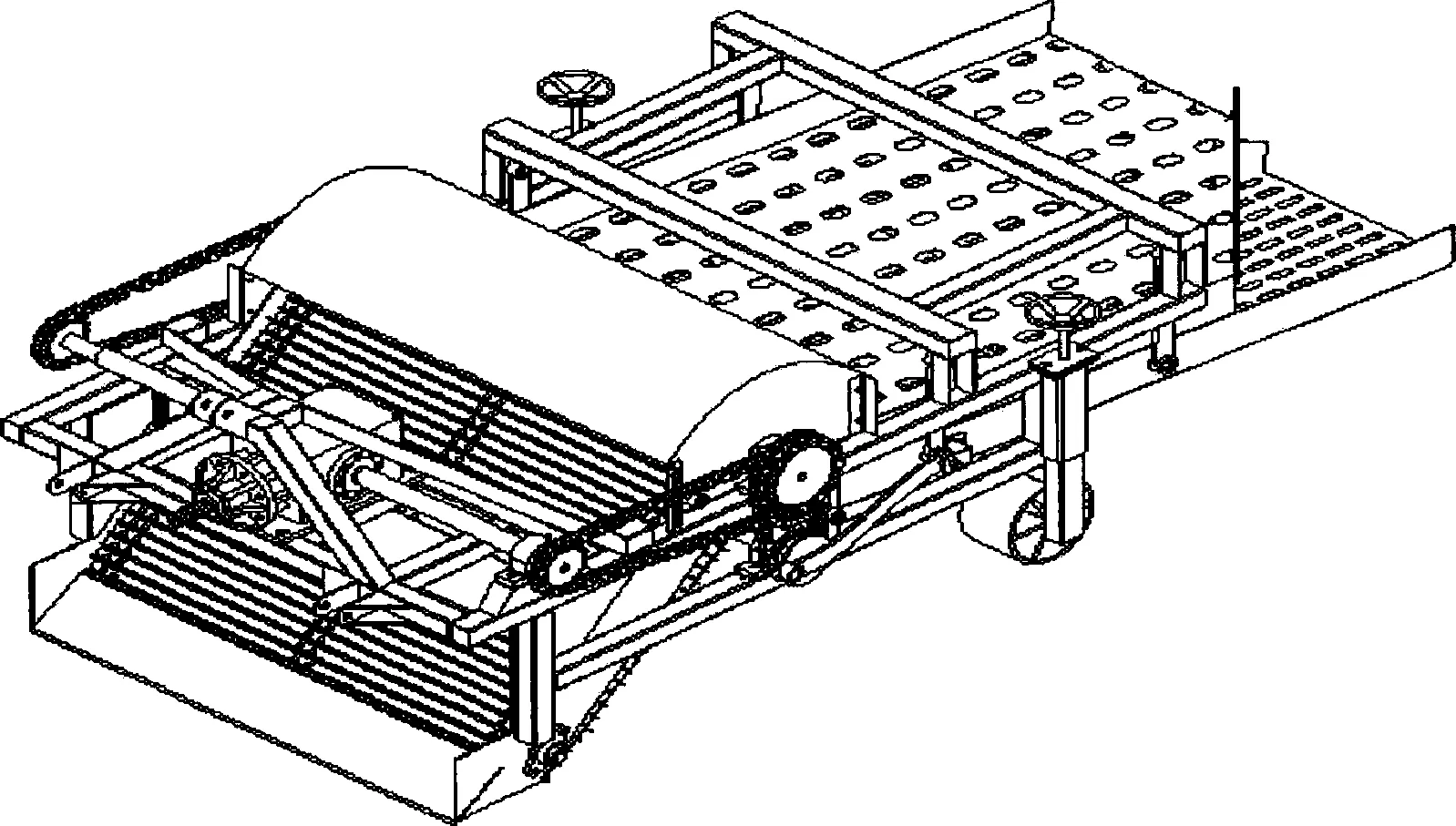
图1 平贝母收获机Fig. 1 Fritillaria Ussuriensis harvester
吴立国等[29]在对黑龙江省伊春市红星区平贝母种植基地进行深入考察后,结合该基地平贝母产业的发展现状,研发了4QPB-1201型平贝母采收机(图2)。该机的筛分装置由滚筒筛、振动筛、末端振动筛三部分构成。振动筛的筛分精度高,但作业效率较低,易发生堵筛现象。本机使用滚筒筛进行初次筛选,降低振动筛的筛分压力,以提高机构整体的工作效率与筛分精度。但该机构无法实现平贝母的分级采收,可将末端振动筛替换为筛网大小不同的双层振动筛以解决这一问题。经田间试验验证,该机的采收效率为0.15 hm2/h,平贝母收净率为99.20%,伤贝率为1.10%,作业性能基本满足平贝母的收获要求,但仍存在伤贝率高的问题,故而未能推广应用。
国内外几款平贝母收获机械的研发单位、关键部件、机械类型、收获效率、损失率和损伤率如表2所示。目前国内的平贝母收获设备大致可划分为平贝母专收机型、多种作物兼收机型两类。平贝母专收机型在设计过程中更多考虑了平贝母的采收工艺与种植规范,因此采收作业的质量要高于多种作物兼收机型。平贝母专收机型的筛分部件可分为单层振动筛、双层振动筛、滚筒筛、振动筛与滚筒筛结合使用的组合式筛分装置四种。单层振动筛的漏筛率高,筛分精度好,但伤贝率较高,且无法依据平贝母的尺寸大小对其进行分级;滚筒筛可依据离心力对不同大小的平贝母进行等级分级,但筛分精度较差,筛后杂质较多;双层振动筛可依据筛孔的不同对平贝母进行分级,但体积较大,机械的灵活性较差;组合式筛分装置充分结合了单层振动筛和滚筒筛的优势,一级滚筒筛对不同大小的平贝母进行等级分级,二级振动筛用于保证筛分精度,但筛网易被土壤堵塞。经对比分析,采用双层振动筛或组合式筛分装置的平贝母专收机型的整体性能要高于其他类型的平贝母采收设备。
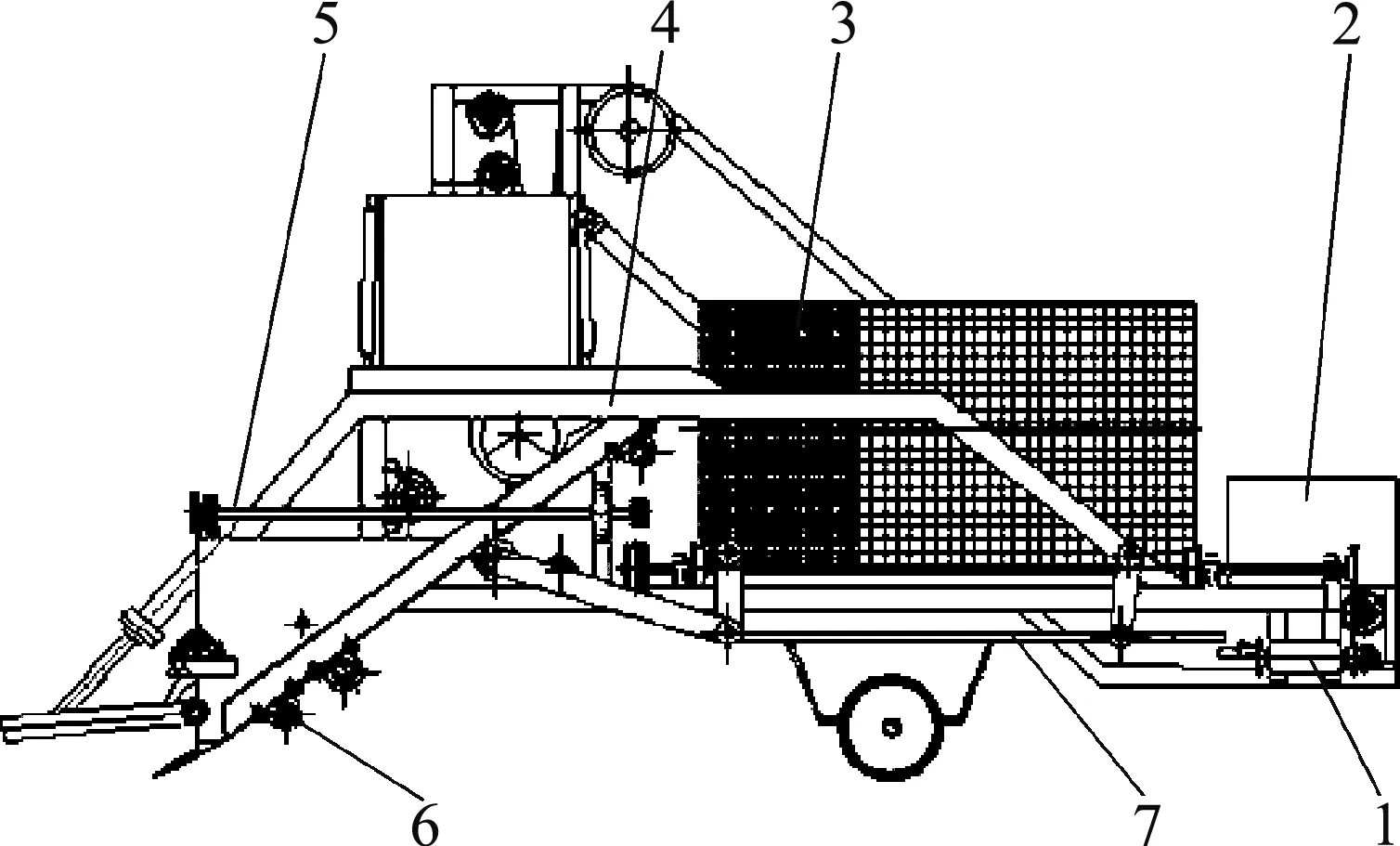
图2 4QPB-1201型平贝母采收机Fig. 2 4QPB-1201 Fritillaria Ussuriensis harvester1.末端振动筛 2.末端收集箱 3.滚桶筛 4.机架 5.传动总成 6.升运装置 7.振动筛
综上所述,现阶段投入使用的平贝母采收设备仍然存在挖掘阻力大、设备自身灵活性差、伤贝率高等问题,目前国内尚无可推广应用的平贝母收获机。因此顺应科学技术发展的潮流,研制一款适用于推广应用的平贝母收获机对促进农村经济协调发展具有重要意义。
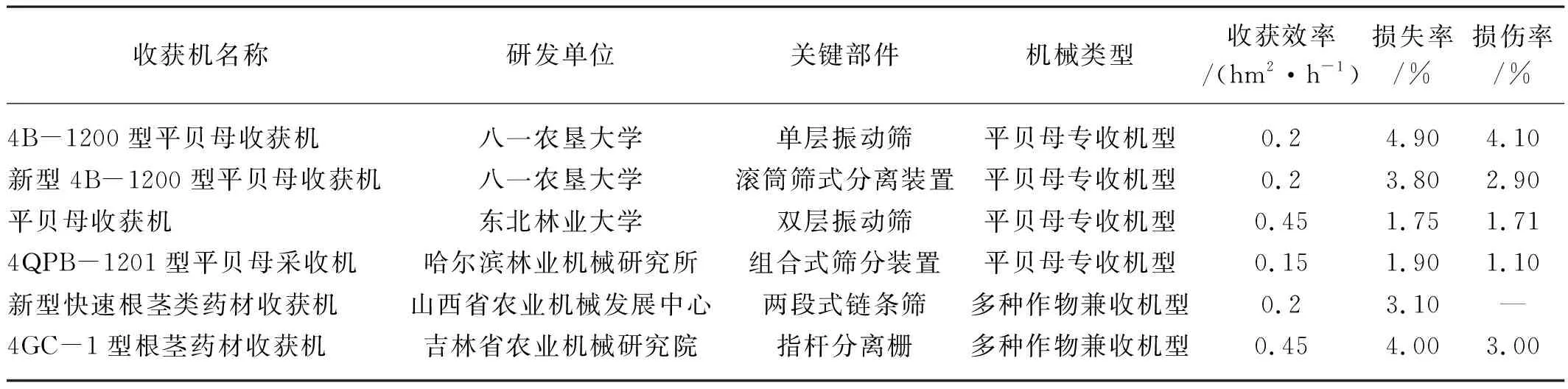
表2 国内几款平贝母收获机械Tab. 2 Several domestic flat fritillary harvesting machinery
3 国内外根茎类作物收获机械挖掘铲的研究现状
挖掘铲是平贝母收获机的核心部件,其主要作用是将平贝母鳞茎从土壤中掘出,并向后方提升装置输送。挖掘铲的结构设计将直接决定其碎土性能、防土壤壅堵能力及挖掘阻力,进而影响收获机的整体性能。不同类型挖掘铲的动力学形式、优点、缺点如表3所示。

表3 挖掘铲分类表Tab. 3 Shovel classificationTable
1) 振动式挖掘铲。振动切削技术根据切削方向数目的不同可分为一维切削与二维切削两种。相比于一维振动切削刃,二维振动切削刃可以抵消部分与土壤相互作用产生的摩擦力与黏附力,具有更加优秀的减阻性能与防土壤黏附能力[30]。因此国内外的振动式挖掘铲多采用二维振动切削刃。2020年,秦战强等[31]为芋头收获机研发了一种三面异型结构的振动式挖掘铲。该铲的振动装置由偏心轮与链轮组成,工作性能稳定,易于维护;铲面由一个平面与两个曲面构成,碎土能力强,不易产生铲面壅土现象;铲刃由同一水平面内的一条直线与两条斜线相交而成,自洁性能好,可完全切断根茎防止秧茎或杂草缠搭。但该铲的掘出物易散落在地面,需要人工或捡拾机械进行二次捡拾作业以保证作物的收净率。整体而言,该铲结构设计合理,整体功能满足工艺要求,具有一定的借鉴价值。在借鉴过程中,应以平贝母的三维尺寸、表面硬度和收获工艺要求为依据,进行铲体结构设计,以降低伤贝率;应以平贝母鳞茎密度、种植农艺需求与当地土壤密度为关键数据,对振动机构进行针对性设计,以提高收净率。
2) 单铲挖掘铲。单铲挖掘铲是指只有一个工作铲面的挖掘铲,包括条形平面铲、三角形平面铲等。单铲挖掘铲性能稳定,易于维护,造价较低,可批量生产,且可以与延伸栅条配套使用以提升其碎土性能,减轻结构的整体质量,因此该类挖掘铲在国内外具有较为广泛的应用。
条形平面铲结构简单,制造方便,且具备较强的兼容性,故多用于采收尺寸较小的根茎类作物。目前现有的平贝母收获机多采用条形平面铲。宋江等研发的4B-1200型作物收获机采用带有延伸栅条的条形平面铲(图3)。该铲的工作宽度为1 200 mm,略大于平贝母的垄宽,可一次完性成整条垄的采收作业;铲面倾角取26°,既降低了铲的挖掘阻力,又保证了铲的碎土性能;延伸栅条间隔取8 mm,平贝母的最小采收尺寸为8 mm,该间隔可以在保证收净率的前提下尽可能的提升装置的碎土性能。条形挖掘铲结构简单,加工方便,制造成本低,在特定工作环境下具有优秀的作业性能,但在土壤含水率较大的条件下易产生土壤壅土现象。因此在设计该类平贝母挖掘铲时,需要依据目标作业区域的具体工作环境,重点考虑其入土角、铲面倾角、铲体长度、工作幅宽等参数的设置,以降低铲体所受挖掘阻力,提高作业性能。此外,还需为铲刃添加自锐能力以解决维护费用较高的问题。
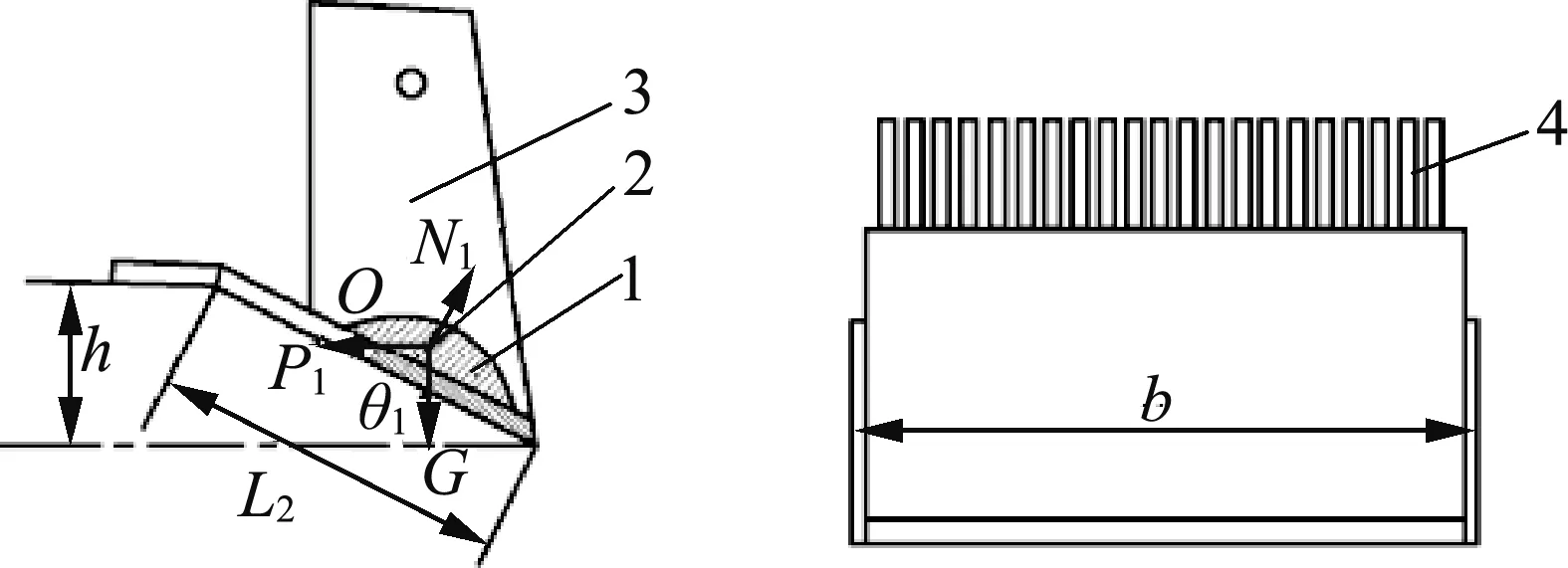
图3 带有延伸栅条的条形平面铲Fig. 3 Strip plane shovel with extended bars1.贝土混合物 2.铲板 3.连接侧板 4.延伸栅条
三角形平面铲性具有稳定的力学结构与良好的入土、碎土性能,但铲面自洁性较差,易产生土壤黏附现象,故三角形平面铲主要应用于土壤粘性较小的工作环境中。目前我国内蒙古、山西、河北等地的中小型马铃薯收获机大多采用三角形平面铲。图4为张泽璞等为板蓝根收获机设计的带有延伸栅条的三角形平面铲。该铲由三角形铲片、侧切削刃、延伸栅条等主要部件组成。延伸栅条可以强化装置的碎土性能,对薯土混合物进行简单分离以降低筛分装置的工作强度。侧切削刃既可以破碎侧方土壤,降低铲的挖掘阻力,又可以切断杂草秧茎,避免造成缠搭现象。但在该结构中,侧切削刃在承担切削任务的同时又作为连接部件的一部分,其工作载荷较大,强度要求较高,易产生折损现象。整体而言,该铲在保证其结构设计尽可能简单的情况下,通过设置侧切削刃、延伸栅条来完善挖掘铲的整体性能,其研究思路值得借鉴学习。
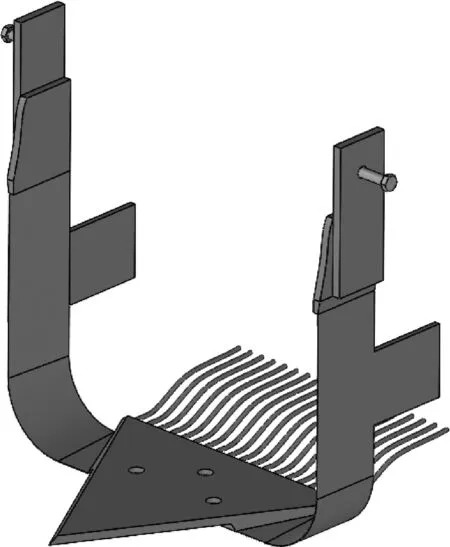
图4 带有延伸栅条的三角形平面铲Fig. 4 Triangular plane shovel with extended bars
东北林区贝母收获季节降水量较大,在设计该类平贝母挖掘铲时,可在铲体表面设置涂层,以提高铲面自洁性;也可将其用作刀头,与条形平面铲组合使用;还可将铲体设计成V形,在保证入土、碎土性能的基础上,减少铲面与土壤的接触面积,铲后设置延伸栅条,在保证铲体工作幅宽的基础上,提高整体机构的碎土性能。
3) 仿生挖掘铲。仿生挖掘铲是指在性能上实现并有效利用生态系统中某种或某几种生物特有功能的挖掘铲。2020年,郎冲冲等[32]依据有限元、离散元仿真分析技术,将仿生学与三七种苗培育工艺相结合,设计出一种基于穿山甲前爪中趾及鳞片性能的三七种苗仿生挖掘铲(图5)。该铲的铲面设计借鉴了穿山甲的鳞片外形特性,通过设置半圆突起结构以增加铲的碎土性能,提高铲的抗土壤黏附能力。铲刃及铲体设计采用了穿山甲前爪中趾的拟合轮廓曲线,铲刃入土性能良好,具有自洁能力,铲体符合仿生学原理,具有良好的结构性能。经模拟实验分析,该铲具有良好的减阻、碎土性能,其各项指标均优于行业标准,满足设计要求。相比于普通挖掘部件,仿生挖掘铲在减阻性能方面具有巨大的优势。但仿生挖掘铲同时也存在结构复杂,生产成本高,维护难度大,开发方式繁琐等问题[33-34]。随着我国加工制造水平的不断提高,仿真模拟技术的不断发展,上述问题正在逐渐得到解决,目前仿生挖掘铲已经成为相关领域的热门研究方向。在设计该类平贝母挖掘铲时,需结合平贝母种植区域内的具体生态环境,从中找出合适的仿生对象作为研究目标,在研发过程中,应脱离以往半经验化的研发模式,合理利用三维扫描、有限元、离散元等技术,设计出能够满足目前甚至未来市场需求的新型仿生挖掘铲。
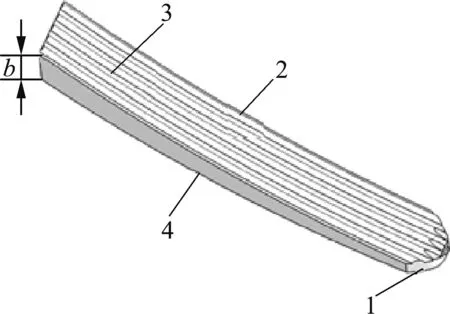
图5 三七种苗仿生挖掘铲Fig. 5 Bionic digging shovel for Panax notoginseng seedlings1.铲尖 2.铲面 3.凸槽 4.铲背
4) 组合式挖掘铲。组合式挖掘铲是指由多组具有特定结构、功能的铲片组合而成的挖掘铲。该类挖掘铲的优点在于可根据目标作物的物理特性、种植工艺、土壤情况对各个铲片进行针对性的设计,以提高挖掘铲的各项性能。图6为程一启等为三七收获机设计的组合式挖掘铲。该铲由土壤破碎铲、二阶平面铲等主要部件构成。二阶平面铲的第一阶铲面倾角取15°~20°,既保证了挖掘铲的入土性能,又提高了铲面的防土壤黏附能力。第二阶的铲面倾角取18°~25°,略大于第一阶,以增强挖掘铲的碎土性能。土壤破碎铲位于两片二阶平面铲之间,不但可以强化挖掘铲的整体碎土性能,而且还能防止衡量迎土面直接与土壤接触,降低机械的运行阻力。铲架宽度数值较大,提高了结构的整体稳定性,防止三七种苗从铲缝滑落。该铲设计合理,结构稳定,收净率高,减阻性能良好,具有很高的借鉴价值。组合式挖掘铲整体性能稳定,维护方便,针对性强,结构设计几乎没有限制,随着平贝母种植规模的不断扩大,种植、采收工艺也在逐渐趋于统一,为此,研发出与之相适应的组合式挖掘铲对平贝母行业的发展具有重大意义。东北林区平贝母种植区域地势较为复杂,因此在设计该类平贝母挖掘铲时,还需为挖掘铲添加角度调节机构、限深机构以提高其环境适应能力,为解决部分区域土壤粘度较大的问题,还应为铲体研发特制涂层材料以提高其铲面自洁能力。
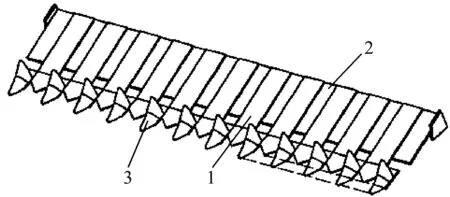
图6 组合式挖掘铲Fig. 6 Combined digging shovel1.二阶平面铲 2.支撑板 3.土壤破碎铲
目前国内平贝母挖掘铲的研发设计思路仍处于经验化或半经验化状态,因此现有的挖掘铲结构设计简单,仅适用于特定工作环境,不具备推广条件。随着市场需求的不断提高,种植面积不断扩大,药农的工作强度也越来越高。为此,应走出经验化、半经验化研究思路的限制,选择科学的研发思路,以提高收净率,降低伤贝率,控制整机能耗,减轻人工负担为目标,将平贝母的物理性质、种植农艺特性,采收工艺特性为重要参数,使用三维扫描、仿生、仿真模拟等技术研发出满足行业需求的、具有推广意义的新型平贝母挖掘铲,以推动全程机械化的进程,促进行业发展,解放农村生产力,提高林区药农的经济收入。
4 平贝母收获机及其挖掘部件现阶段存在问题
4.1 平贝母收获机现阶段存在问题
1) 目前,国内尚无可推广的平贝母采收设备。多数现行采收机械仅能在特定作业环境中工作,机体灵活度差,挖掘阻力大,伤贝率高,作业效率低,难以应对林区小地块种植区域的复杂地形。
2) 现阶段平贝母专收设备的专业化程度较低,与采收作业工艺要求之间的配合并不紧密,因此在作业过程中尚需人工协助配合,但该类平贝母收获机在工作时其筛分机构会产生大量扬尘与噪音,不但损害了工作人员的身体健康,而且严重影响了工作人员的视觉、听觉,从而加重药农的工作负担。
3) 市场上现有的多种作物兼收机型虽然提高了设备的利用效率,但也削弱了收获机的专业性。因为根茎类作物的物理性质存在差异,因此筛分装置无法依据作物的三维尺寸对其进行分级。人工分级劳动强度大,作业效率低,且分级过程中易对平贝母产生一定程度的损伤,从而造成不必要的经济损失。
4.2 平贝母收获机挖掘铲现阶段存在问题
1) 挖掘铲作为平贝母收获机的核心部件,直接对采收作业的质量产生影响,但经验、半经验化的研发思路导致研究人员对于平贝母挖掘铲的探索集中在了入土倾角、铲面倾角、作业深度、工作幅宽等参数的设置上,进而忽略了不同挖掘铲类型、不同铲体形状设计、不同铲刃形状规划、不同材料选择等因素对挖掘作业产生的影响。
2) 市面上的平贝母挖掘铲多为单铲片挖掘铲,该类设计结构简单,降低了铲体的加工难度与制造费用,但该类铲体的设计者很少考虑铲刃自锐性,这导致铲刃损坏后维护难度较大,极端情况下甚至需要对整个铲体进行更换。
3) 目前,现有的平贝母挖掘铲均存在环境适应性差的问题。在特定工作环境下,现有的平贝母挖掘铲均能发挥出稳定的作业性能,但当现场工作环境异于设计环境参数时,就会出现铲面壅土、收净率低、挖掘阻力大等问题,因此现有的平贝母挖掘铲尚不具备推广条件。
5 平贝母收获机及其挖掘部件的发展趋势
5.1 平贝母收获机的发展趋势
1) 我国平贝母种植业正处于发展阶段,种植面积相对较小,研发可兼收包括平贝母在内的多种作物的收获机可以在满足平贝母行业对收获机需求的基础上最大限度的节约成本,提高机械的利用率。
2) 拖拉机在我国东北农村已经普及,为了提高拖拉机的利用率,降低生产成本,背负式平贝母收获机成为了当前市场上的主流。但随着川贝母野生资源的不断枯竭,市场对平贝母的需求越来越大,面对不断扩大的种植规模,背负式平贝母收获机将很难满足行业需求。而自走式收获机具有收获效率高、对复杂收获环境适应性好、节省人力资源等特点,可以满足平贝母种植业对高效、低耗的新型平贝母收获机的要求。
3) 随着市场需求的不断增加,平贝母的种植规模也在不断扩大,研发中小型联合作业收获机将会极大提高平贝母的采收效率与采收作业的质量,从而促进该行业的蓬勃发展。
平贝母收获机将会朝着高效化、采收过程专业化、采收作物兼容化方向发展。
5.2 平贝母收获机挖掘铲的发展趋势
1) 有限元、离散元仿真技术的逐渐成熟为平贝母挖掘铲的研发提供了一种全新的研究思路:在挖掘铲的设计研发阶段借助有限元仿真分析来检验其自身的静力学性能及结构强度,再利用离散元仿真模拟技术来模拟挖掘铲的工作过程以分析其性能是否满足设计要求。有限元、离散元仿真技术将成为新型平贝母挖掘铲研发过程中的重要工具。
2) 相比于传统挖掘铲,仿生挖掘铲在减阻、碎土性能上具有明显的优势。随着仿真模拟技术、仿生学的不断发展,仿生挖掘铲相关领域将会成为挖掘部件研发领域中的热门方向。
3) 组合式挖掘铲整体性能好,结构设计局限性较小,可根据采收作物的物理性能、种植环境设计出相应的挖掘铲。目前我国东北地区的平贝母种植业正在不断发展,平贝母的栽培工艺也在逐渐确立。研发与平贝母栽培采收工艺相适应的组合式挖掘铲可以极大提高采收作业的质量,提高药农的经济效益。
6 结论
1) 目前,国外尚无平贝母收获机械相关领域的研究,国内还未研制出可推广应用的平贝母收获机械。平贝母的市场需求逐年提升,种植规模也在不断扩大。为了促进平贝母种植业及相关产业的健康发展,研发可以满足市场需求的新型平贝母收获机具有重要意义。研发可兼收多种作物的中小型自走式收获机与具有针对性的专业化中小型联合收获机为平贝母未来的两种发展趋势。
2) 目前国内外根茎类作物收获机械挖掘铲的研究较为成熟,但平贝母收获机械挖掘铲相关领域的研究仍处于初级阶段。挖掘铲作为平贝母收获机的核心部件,将会对机械的整体性能产生直接影响。因此研发新型挖掘铲既是研发新式平贝母收获机的第一步,同时也是实现平贝母种植业全过程机械化的关键一步。有限元、离散元仿真技术的发展正在逐渐改变此前半经验化的研究思路。未来平贝母收获机械的挖掘铲将会朝着研究思路科学化、研发手段专业化、运行性能稳定化的方向发展。