基于TSMC0…18μmCMOS工艺的PWM电路设计
2022-08-15王子训曹蕴清
王子训,曹蕴清
(扬州大学 物理科学与技术学院,江苏扬州,225009)
步进电机又称脉冲电机或阶跃电机,是一种将电脉冲信号转换成相应的角位移(或线位移)的机电元件,国外一般称为Step motor、Pulse motor 或Stepping motor。随着近代微电子技术和计算机技术的迅猛发展,步进电机经过几十年的发展,其应用越来越广泛,但是人们对步进电机的性能有了更高的要求,而步进电机的运行性能与其使用的驱动器有着密切的关系[1]。
步进电机细分驱动技术是近几年来发展起来的一种可以显著改善步进电机综合使用性能的驱动技术[2],是步进电机实现细分运行的关键。而针对脉冲驱动的脉冲宽度调制(PWM)驱动是步进电机细分驱动电路中普遍采用的技术,通过PWM 控制驱动器的开通和关断,使电机绕组电流按规律变化,从而实现步进电机的恒转矩细分驱动[3-5]。本文使用Cadence软件,基于TSMC 0.18μm CMOS工艺设计了一款双极性、固定关断时间(OFF)的定电流PWM细分电路。在步进电机中应用非线性DAC,将各相绕组电流通过PWM 控制,获得按规律改变其幅值的大小和方向的绕组电流,可实现将步进电机一个整步均分为若干个更细的微步。
通过Cadence spectre对所设计的电路进行了仿真测试,证明了设计方案和理论分析的可行性和正确性。在电路设计的基础上,完成了芯片版图的绘制,通过了DRC和LVS验证,并进行了QRC参数提取,验证了版图的正确性。
1 PWM的电路结构
1.1 整体结构
PWM控制电路由RS触发器电路、电压比较器电路、振荡器电路和施密特触发器电路组成[3],如图1所示。PWM是目前步进电机细分驱动电路中普遍采用的技术,具有功耗低、体积小、适合于复杂的电流波形控制、动态性能好等优点。
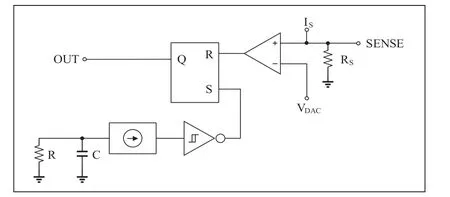
图1 PWM电路结构图
该电路的原理图如图2所示,工作过程是振荡器产生激励,经施密特触发器整形后变为脉冲信号,接入到RS触发器的S端,使触发器置位。SENSE脚串接一个电流检测电阻到地,电机绕组的电流通过电流检测电阻RS产生的压降与H桥向电机绕组供电的输出电流IS一起输入到电压比较器的正相输入端,当振荡频率很高时, 电流波动极小。外部的数字控制信号经非线性DAC转换成某一满足特定关系的模拟电压信号,输入到电压比较器的反相输入端。电压比较器的输出接入到RS触发器的R端,使得触发器输出PWM信号,同时相应输出级功率开关管导通;之后绕组电流一直上升,一旦采样电阻RS上的电压上升到DAC输出电压VDAC时,比较器翻转,使触发器复位,输出级功率开关管关断。功率开关管的关断(OFF)时间是一定的,是振荡电路使触发器置位所用的时间,通过控制输出级功率开关管导通与关断,周期循环,从而使输出维持恒定的电流。

图2 PWM电路原理图
1.2 RS触发器电路
RS触发器电路是由CMOS管组成的基本RS触发器[6],RS触发器电路的R端接电压比较器电路的输出端,S端接振荡器电路的输出端。本文采用的RS触发器电路是由两个与非门电路G1和G2构成,以低电平作为输入信号,R和S分别表示置0输入端和置1输入端,电路使用的元件参数如表1所示。

表1 RS触发器元件参数
该电路的工作原理是:当S=0、R=1时,Q=1,触发器处于“1”状态;当S=1、R=0时,Q=0,触发器处于“0”状态;当S=1、R=1时,触发器维持原来的状态不变;当S=0、R=0时,触发器的状态不定,作为约束条件不允许输入此信号,电路的特性表如表2所示。
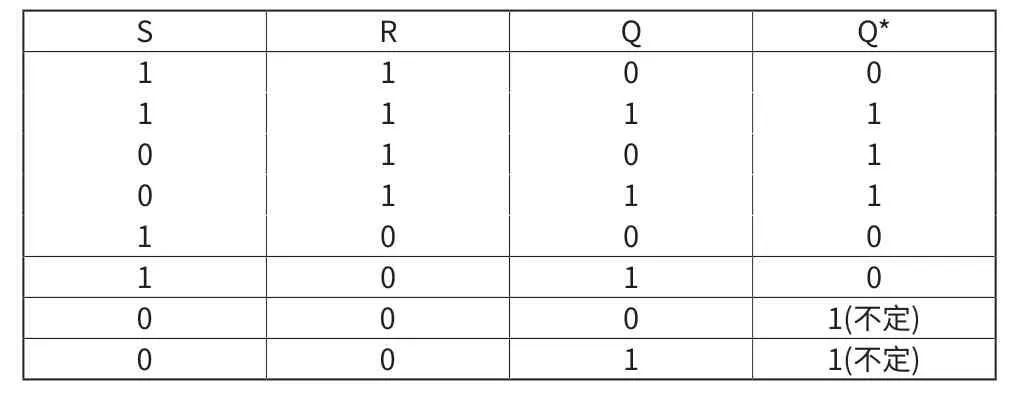
表2 RS触发器特性表
1.3 电压比较器电路
本文设计的电压比较器是一个对称电路,比较器的正相输入端是流过H桥输出级的电流在采样电阻上的压降,此压降正比于负载电流;反相输入端是三位非线性DAC的输出电压,即负载电流随着非线性DAC的输出变化而变化,该电路使用的元件参数如表3所示。电压比较器模块的好坏直接决定了控制电路精度的高低,此次报告提出了一种动态比较器,功耗较小,并且分辨率高,在一个CLK周期内就能完成复位和比较两个阶段,并且利用了正反馈,可以分辨出 μV量级的电压差别,对于本次设计的分辨率完全满足。
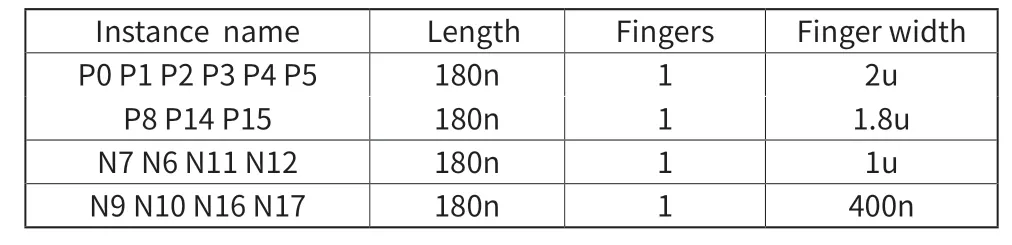
表3 电压比较器元件参数
其逻辑功能为:当时钟信号为0时,电路处于复位阶段,两个输出均钳位于高电位;当时钟信号为 1时,第一级放大器处于放大状态,第二级只要第一级输入信号存在差异,导致输出差别迅速拉大,从而输出一个 1 和一个 0。CLK时钟信号频率越高,转换速度越快。
通过Spectre仿真器模拟可得,本文设计的电压比较器的零漂只有几个微伏,同时能够鉴别大于 10 μV的输入电压差,时钟频率设置为 100 MHz,并且已经验证随着时钟频率的下降,电压比较器的精度会有所上升。
1.4 振荡器电路
振荡器电路的功能是产生恒稳定的周期性时变输出波形,作为信号处理电路的信息或者定时信号。振荡器电路的输出作为RS触发器电路的S端输入,振荡不断进行,电路持续输出矩形脉冲信号。多谐振荡器电路对IC设计而言有一些独特的优点:
(1)不适用电感元件;
(2)易于设计和制作,可以预知输出波形;
(3)电路的频率反比与外部电容值,可以很方便地通过外部元件调控。
本文在这里使用的是环形振荡电路,由三个反相器和RC延迟电路构成[6]。由于门电路的传输延迟时间使得输出发生跳变,使用电容加长延迟时间,通过奇数个反相器周而复始,就产生了自己振荡。当VI2处发生负跳变时,经过电容C使VI3首先跳变到一个负电平,然后再从这个负电平开始对电容充电,这就加长了VI3从开始充电到上升为VTH的时间,从而加大了VI2到VI3的传输延迟时间,通过电容的充放电优化了电路的振荡频率。
通过计算,本文得出了电路的振荡周期近似等于:

在该电路中,本文将电容C和电阻R单独设置接口,引出电机驱动电路,方便随时控制振荡器的振荡频率。通过设置电路R和电容C的值,调节振荡器电路的振荡频率,进而控制PWM信号振荡周期。
1.5 施密特触发器电路
施密特触发器电路是一种正反馈电路,是脉冲波形变换中常用到的一种电路,又称为鉴幅器。它在性能上具有以下两个特点:
(1)输入信号从低电平上升的过程中电路状态转换时对应的输入电平,与输入信号从高电平下降过程中对应的输入转换电平不同;
(2)在电路状态转换时,通过电路内部的正反馈过程使输出电压波形的边沿变得很陡。
利用以上这两个特点不仅能将边沿变化缓慢的信号波形整形为边沿陡峭的矩形波,而且可以将叠加在矩形脉冲高、低电平上的噪音有效地清楚。此外,无论输入信号的波形如何,该电路均输出矩形脉冲。
本文设计的施密特触发器电路是利用反相器和电阻组成[6],将两级反相器串接起来,同时经过分压电阻将输出端的电压反馈到输入端,就形成了一个具有施密特触发特性的电路。反相器G1和G2都是CMOS电路,VTH= 0.5VDD,且满足条件R1<R2;若R1>R2,电路将进入自锁状态,不能正常工作。
电路的回差电压为:

振荡器电路的输出作为施密特触发电路的输入,振荡不断进行,电路输出呈现固定脉宽的脉冲信号,实现了施密特触发电路功能。本文在这里只使用了VO′作为本文施密特触发器电路的输出,并通过改变R1和R2的比值来调节回差电压的大小,控制调整波形的脉冲宽度。
2 仿真结果与分析
本文仿真工具是由Cadence提供的Spectre仿真器,在Analog Environment仿真环境下对电路进行仿真[7]。Spectre仿真器可以进行模拟以及数字电路的仿真,具有仿真精度高、速度快,操作环境简便等特点。
PWM电路整体仿真结果如图3所示,PWM电路输出呈现固定脉宽的脉冲信号,可实现双极性、固定关断时间的定电流控制,输出频率为f=25097 kHz,周期为T=39.85 ns。从而使得功率开关管的关断时间是一定的,通过控制输出级功率开关管的导通与关断,周期循环,从而使输出维持恒定的电流。
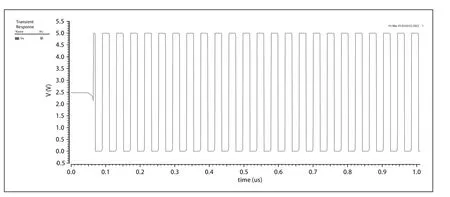
图3 PWM电路仿真波形
3 版图设计与验证
本文的版图设计采用的工具是Cadence Vituoso Layout Editor,验证工具是Cadence Assura,设计出PWM电路版图,进行DRC和LVS验证,并提取QRC参数[7]。版图中NMOS、PMOS、电阻和电容共计37个元件,整个版图在保证电参数的基础上,力求布局合理整洁,面积最小。本文根据以下原则进行了版图的布线与布局:
(1)力求元件排列紧凑,以减小寄生效应的影响,并有利于提高成品率;
(2)要求对称的管子,除了保证图形十分一致外,位置也尽量靠近,以减小由于材料、工艺及温度不均匀造成的不利影响,而要求对称的电阻,注意平行排列,以减小光刻、制版工艺引入的误差;
(3)压焊点的分布均匀以适应不同的封装形式。
DRC验证是检查版图中各掩膜相关层上图形的各种尺寸,保证无一违反预订的设计规则。LVS 验证是从版图中根据器件与节点识别提取出的电路同原设计的电路进行对比检查,要求二者在结构上达到一致。在进行LVS验证之后,对电路进行QRC参数提取。
本文在 PWM 电路设计的基础上,进行了芯片版图的设计与绘制,版图设计如图4所示。通过了DRC和LVS验证,并进行了QRC参数提取,结果如图5所示,验证了所绘制版图的正确性。所设计的版图符合原电路设计指标,且面积最小,成品率较高。

图4 PWM电路版图设计
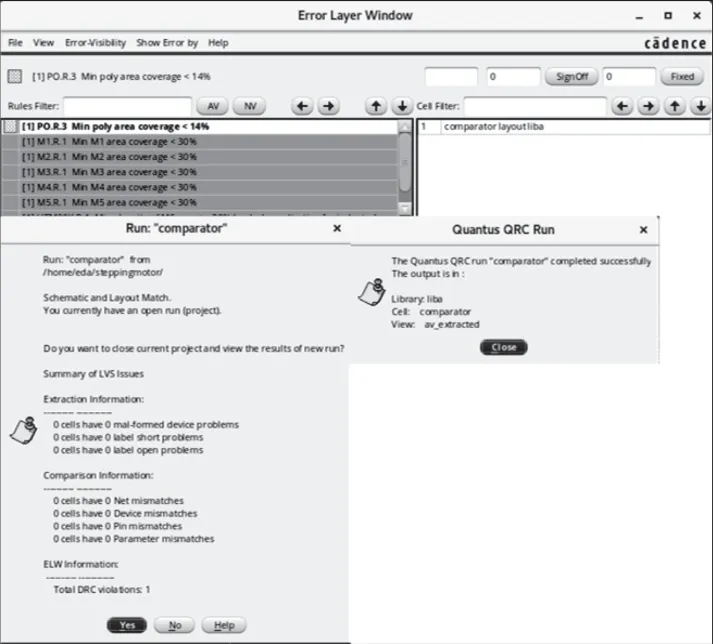
图5 版图验证
4 结论
本文使用Cadence软件,基于TSMC0.18μmCMOS工艺设计了一款PWM控制电路。该电路输出信号可以控制步进电机输出级功率开关管的导通与关断,关断时间为振荡电路使触发器置位所用的时间,周期循环,输出恒定的电流,达到了细分驱动步进电机的目的。用PWM斩波电路实现步进电机绕组电流的恒流控制,是一种实现步进电机恒转矩细分驱动较实用的方案。本文所设计的PWM电路在理论分析和模拟仿真结果下达到了细分驱动的目标,但是电路的可靠性与稳定性还有待研究,由于本人水平有限,不足之处还请指正。
