航天器可展开薄膜遮光罩机械设计的发展与展望
2022-08-15刘志全操安博林秋红
刘志全,操安博,林秋红
(中国空间技术研究院总体设计部,北京 100094)
0 引 言
防杂散光、防外热流输入是近年来许多航天器设计的重要技术要求。装有对杂散光敏感的仪器设备(如星敏感器、相机、太空望远镜等)的航天器,其飞行任务的成败与防杂散光效果密切相关。来自太阳等光源的杂散光会降低仪器的信噪比,甚至会导致成像模糊、任务失败。传统的杂散光抑制措施(用光阑控制杂散光输入或用涂层吸收杂散光等)的能力十分有限,难以满足航天器日益严苛的需求。在仪器设备外部安装遮光罩虽然会增加航天器的质量和姿态控制难度,但是能够直接防止杂散光的输入,并且可与传统的防杂散光措施配合使用,已成为很多航天器的必然选择。在热控方面,大功率仪器设备产生的热量很难依靠一般的被动热控措施(如喷热控漆、预埋或外贴热管等)散发出去,往往需要借助流体回路对流换热等复杂的主动热控措施来散发热量,若再加上太阳光外热流的输入,完全依靠主动热控措施,将会极大地增加热控部分的质量和复杂度。百叶窗也是防止外热流输入的一种技术手段,但它也涉及驱动、传动和控制单元,其复杂程度及联动绳或链传动的钩挂风险也使其应用受限。遮光罩能够避免太阳光外热流的输入,从而降低航天器对主动热控的需求。因此,迫切需要研制质量轻、展收比大的航天器可展开薄膜遮光罩,以消除或降低杂散光、外热流给航天器带来的不利影响,降低航天器热控部分的复杂程度。为了借鉴国内外可展开薄膜遮光罩的研制经验,促进可展开薄膜遮光罩技术的发展,本文从几何构型、展开驱动技术、薄膜折痕设计、薄膜褶皱动力学分析四个方面对可展开薄膜遮光罩的机械设计发展进行综述,对可展开薄膜遮光罩机械设计的发展趋势进行展望,旨在为薄膜遮光罩的创新发展提供参考。
1 可展开薄膜遮光罩几何构型的发展
目前,可展开薄膜遮光罩的几何构型主要分为柱面和平面。航天器在轨飞行期间镜头等设备的外法向与太阳光线的夹角称为太阳光照射角。为了抑制杂散光,需要根据在轨飞行期间可能发生的最小太阳光照射角来设计遮光罩的构型和尺寸。太阳光照射角偏小时通常用柱面遮光罩,但是柱面遮光罩显著减小镜头的视场角;太阳光照射角偏大时可酌情用柱面或平面遮光罩。根据轨道计算可知,大多数对地观测航天器都面临太阳光照射角偏小的情况,往往采用柱面遮光罩。运行在日地拉格朗日L2点附近的太空望远镜始终背向太阳来观测太阳系外天体,太阳光照射角始终偏大,因此可用平面遮光罩或柱面遮光罩。日冕仪需要将遮光罩置于镜头前方并且要求遮光面积尽可能大,因此必须使用平面遮光罩,详见后文1.2节。
1.1 柱面遮光罩
2004年,文献[3-4]介绍了MITAR遥感小卫星柱面可展开薄膜遮光罩。该遮光罩的展开机构由5个如图1所示的正八边形柱面单元纵向堆叠而成,每个单元包含上下两个正八边形框架,下方单元的顶部框架即为上方单元的底部框架。相邻八边形框架之间交叉安装4组共8个带簧铰链,铰链的两端分别与上下框架连接。遮光薄膜贴附在八边形框架的外侧。通过带簧铰链之间的角度变化实现遮光罩的收拢与展开。卫星入轨前,绳索捆绑住所有正八边形框架,使每组带簧铰链之间的夹角为零。遮光罩呈收拢状态,带簧铰链处于弯折状态。当卫星入轨后,火工装置按照飞行程序的点火指令点火,将捆绑正八边形框架的绳索切断,解除绳索对正八边形框架的约束。在带簧铰链弹性力作用下,各单元正八边形框架沿柱面轴线方向展开,从而带动薄膜实现遮光罩的展开。

图1 MITAR正八棱柱柱面遮光罩单元(未贴薄膜的展开状态)Fig.1 Octagonal cylindrical element of MITAR sunshield (deployed and without membrane)
这种在展开机构外侧直接贴附薄膜的遮光罩,设计简单,技术成熟度好。但是在展开过程中存在框架损伤薄膜的风险,影响遮光罩的遮光和隔热性能。
2009年,美国诺斯罗普-格鲁曼公司的Danner等为IXO望远镜设计了可展开框架位于遮光薄膜内侧而与薄膜间无贴附关系的遮光罩,见图2。
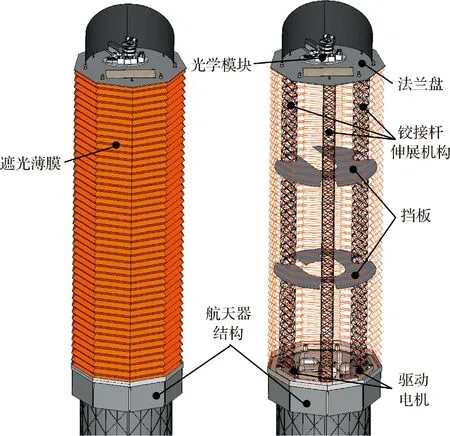
图2 IXO棱柱柱面遮光罩Fig.2 IXO prism sunshield
3组铰接杆伸展机构的动力源是3个驱动电机。驱动电机固连在航天器结构上。铰接杆伸展机构的另一端连接多边形法兰盘。遮光薄膜的一端与航天器结构连接,另一端与多边形法兰盘边缘连接。航天器入轨后,3组铰接杆伸展机构在电机驱动下同步展开,推动多边形法兰盘向远离航天器结构的方向运动,从而实现遮光薄膜展开,如图2(左图)所示。铰接杆伸展机构上固定的两个挡板仅用于控制光路,其刚度较低,对提高遮光罩横向刚度不起作用。光线经光学模块上的镜头进入遮光罩内部,经两挡板缺口被遮光罩底部的相机接收。铰接杆伸展机构在伸展过程中会推动两个挡板到特定位置。
该设计能有效避免薄膜与可展开框架接触,展收比(柱面遮光罩的展收比为遮光罩在柱面高度方向上展开和收拢状态下的长度之比)较大。但是可展开框架位于遮光罩内部会影响光学设备的光路,该设计仅能用于对展开精度要求极高的特定光学系统(如IXO望远镜的光学模块位置误差不能超过1 mm)。此外,该柱面遮光罩横向刚度较低。
2004年,美国国家航空航天局喷气推进实验室(JPL)的Fang等设计的TPF-C(Terrestrial planet finder-coronagraph)望远镜的柱面遮光罩见图3。
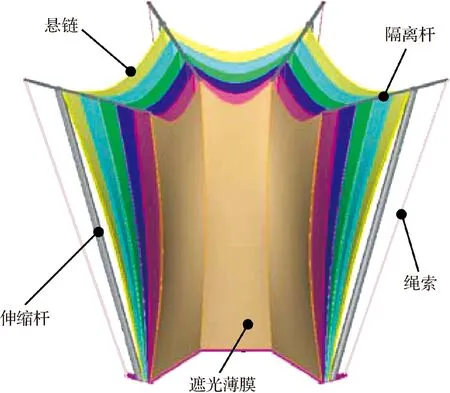
图3 TPF-C柱面遮光罩(截面图)Fig.3 Cylindrical sunshield of TPF-C (cross-section view)
该望远镜柱面遮光罩采用伸缩杆(展开机构)位于遮光罩外部的设计。遮光罩包含6层遮光薄膜,每层膜分为8瓣,最里层的遮光薄膜为正八棱柱柱面,最外层的遮光薄膜为正八棱台的侧面,在每层膜的末端有一根张紧薄膜的悬链,8根隔离杆将各层薄膜隔开。整个遮光罩呈内棱柱面、外棱台面的形状,有利于热量在薄膜间反射后从棱台底边一侧排出。8根伸缩杆的两端分别连接航天器结构与隔离杆,每根伸缩杆底部都有一个驱动电机。航天器入轨后伸缩杆在电机驱动下伸长,展开遮光薄膜。绳索起力矩平衡、稳定伸缩杆的作用。
与可展开框架位于遮光罩内部的设计相比,该设计更方便实现各伸缩杆间的横向连接,横向刚度高,可实现具有多层薄膜的遮光罩。但是多层薄膜折叠时膜间气体的排出较为困难。
当杂散光与柱面遮光罩轴线倾斜并射入完整柱面遮光罩内部时,部分杂散光会在遮光罩内壁反射,影响卫星相机的成像质量,如图4 (a)所示。在遮光罩内部增加挡光环可以消除这部分杂散光,但这样既增加了结构质量,又增加了可展开框架展开时钩挂的风险。局部柱面遮光罩(如图4 (b)所示)相当于将完整的柱面遮光罩沿杂散光光束方向斜切掉一部分所形成。对于局部柱面遮光罩来说,可根据太阳光与航天器之间的相对位置关系,将局部柱面遮光罩设计为绕中心轴转动(或局部柱面遮光罩与航天器结构之间固连,让航天器绕中心轴转动)让来自特定角度的杂散光不进入遮光罩,这样可避免完整柱面遮光罩存在的杂散光在罩内反射问题。因此,局部柱面遮光罩消除杂散光的能力更强。
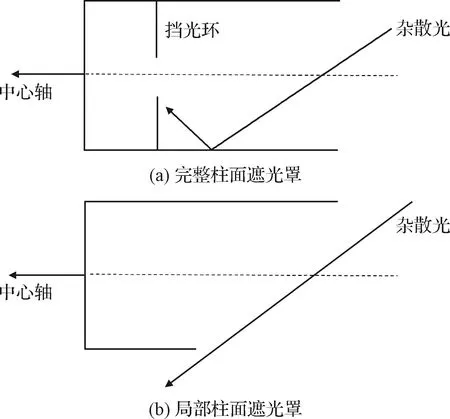
图4 完整柱面和局部柱面遮光罩对比Fig.4 Comparison of complete and partial cylindrical sunshields
2010年,中国科学院上海技术物理研究所蒋范明等研制了具有与MITAR相类似可展开框架结构的可转动式局部柱面可展开薄膜遮光罩。框架底部安装了可转动的随动底座,电机通过钢丝绳驱使随动底座旋转实现可展开框架旋转。
2019年,北京空间机电研究所曹旭等为高分七号遥感卫星的相机研制了局部柱面可展开薄膜遮光罩,见图5。遮光罩由4瓣相互独立的遮光薄膜组成。每瓣薄膜两端有2根“豆荚杆”(详见2.2节)。相邻两瓣薄膜重合搭接,避免漏光。卫星入轨前,所有“豆荚杆”向外翻折由绳索固定,遮光罩收拢。卫星入轨后,火工装置点火切断绳索,“豆荚杆”的弹性力驱使遮光薄膜展开。2021年,曹旭等在文献[13]中介绍了该遮光罩展开过程的动力学仿真研究。

图5 高分七号卫星局部柱面可展开薄膜遮光罩Fig.5 Partial cylindrical deployable membrane sunshield of the GF-7 satellite
该遮光罩与卫星结构之间固连。为持续遮挡杂散光,需要卫星绕中心轴转动。该遮光罩结构简单,质量较轻。但是展开过程中产生的冲击对光学设备有一定影响;瓣间无横向连接,横向刚度相对较低。
局部柱面遮光罩虽然能够有效减少杂散光,但它仅对特定方向的杂散光有效,因此须根据太阳与航天器间的相对位置来转动遮光罩或卫星,增加了系统复杂性和能耗,产生的微振动会影响成像质量。
1.2 平面遮光罩
2011年,欧洲航天局(ESA)所属欧洲空间科学研究和技术中心(ESTEC)为Gaia太空望远镜研制了一个花瓣状的平面遮光罩,由12个矩形瓣和12 个三角形瓣组成。遮光罩与太阳电池板采用一体化设计。单矩形瓣如图6(a)所示;遮光罩局部结构中矩形瓣和三角形瓣的位置见图6(b)。每个矩形瓣包括一个太阳电池板和一个碳纤维增强塑料框架,框架中央横梁布有一个压紧释放装置。框架内外表面贴附遮光薄膜。压紧释放装置和太阳电池板分别位于框架内表面和外表面两侧。框架与航天器结构连接处的电机驱动框架旋转。遮光罩呈收拢状态时,三角形瓣处的遮光薄膜按预留的折痕折叠,压紧释放装置将矩形瓣固定在柱状的航天器结构侧壁。当航天器入轨后,压紧释放装置解除对矩形瓣的约束,电机驱动框架旋转至所需平面位置,三角形瓣也随之从收拢状态变为展开状态。欧洲航天局用多个原理样机验证了该遮光罩的性能。2019年,印度海德拉巴大学Hasan认为Gaia太空望远镜遮光罩边缘使多于预期的杂散光进入镜头。
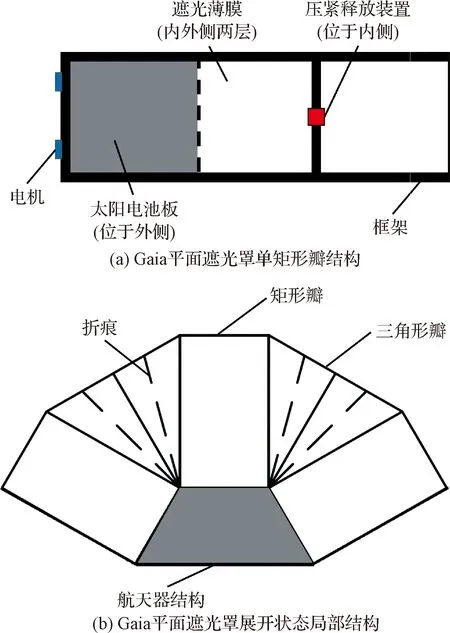
图6 Gaia望远镜平面遮光罩Fig.6 The planar sunshield of the Gaia telescope
2020年,中国空间技术研究院钱学森空间技术实验室的仝照远等为觅音望远镜设计了与Gaia遮光罩相类似的遮光罩,尺寸较小,具有6个矩形瓣和6个三角形瓣,用带簧铰链来驱动框架旋转。
上述平面遮光罩具有良好的机械稳定性,质量较轻。但是,遮光罩和太阳电池板的一体化设计也有一定的负面影响,阳光带给电池板的热会传递给遮光薄膜,影响遮光罩的隔热效果。此外,矩形瓣的最大长度与航天器结构的高度相同,而航天器高度受整流罩的尺寸限制,因此该遮光罩的展收比(平面遮光罩的展收比为遮光罩在展开平面上展开和收拢状态下垂直投影面积之比)受限,难以用这种遮光罩实现大的展收比。
美国国家航空航天局的TPF-O(Terrestrial planet finder-occulter)任务(2007年)、Starshade任务(2008年)和THEIA(Telescope for habitable exoplanets and interstellar/intergalactic astronomy)任务(2007年)都计划研制平面可展开薄膜遮光罩来遮挡太阳系外其他恒星的杂光,以保护望远镜(日冕仪)。其工作原理与日食期靠月球遮挡太阳光来观测水星相同。因花瓣结构能改善遮光罩的衍射特性,故以上平面遮光罩均设计成花瓣状结构。
THEIA遮光罩系直径为40 m的平面可展开薄膜遮光罩,服务于直径为4 m的光学望远镜。望远镜和遮光罩是两个彼此独立的、均运行在日地拉格朗日L2点晕轨道上的航天器。望远镜和遮光罩组成的光学系统通过多种精密测控定位方法进行定位,依靠高精度电推进发动机实现姿态控制,使得观测时遮光罩保持在距离望远镜35 000 km或55 000 km的位置,两者中心轴重合,中心轴指向太阳系外某恒星,每次观测持续数千秒。观测过程中遮光罩遮挡来自恒星的强烈杂光,使得光学望远镜能够探测到距离恒星较近的类地行星反射的光线。2009年,美国普林斯顿大学的Kasdin为THEIA望远镜设计了如图7所示的平面遮光罩。
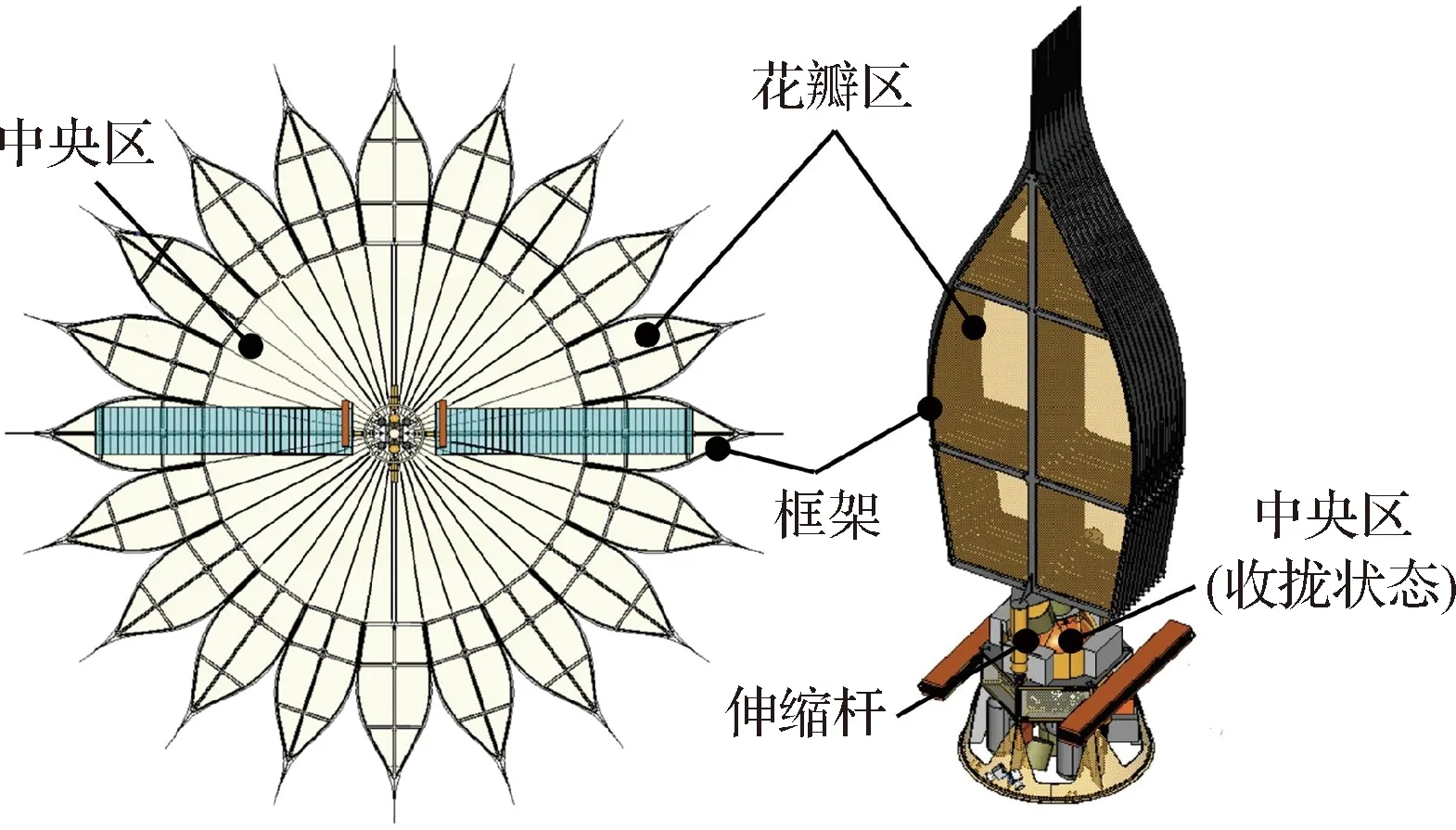
图7 THEIA平面遮光罩展开和收拢状态Fig.7 Deployment and stowage of the planar sunshield of THEIA
THEIA遮光罩分为花瓣区和中央区。花瓣区的每个“花瓣”由框架贴附单层遮光薄膜组成。中央区通过伸缩杆与航天器结构连接。航天器入轨后,电机驱动伸缩杆伸长,中央区的薄膜随之受拉而展开,然后伸缩杆旋转依次展开花瓣区。但文献[22]尚未提及如何通过旋转伸缩杆来展开花瓣区,仅提到展开需大量高精度电机驱动铰链。
2008年,美国科罗拉多大学的Cash为Starshade任务设计了平面可展开薄膜遮光罩。该遮光罩也分为中央区和花瓣区,中央区周围有可展开框架,遮光罩展开和收拢状态如图8所示。
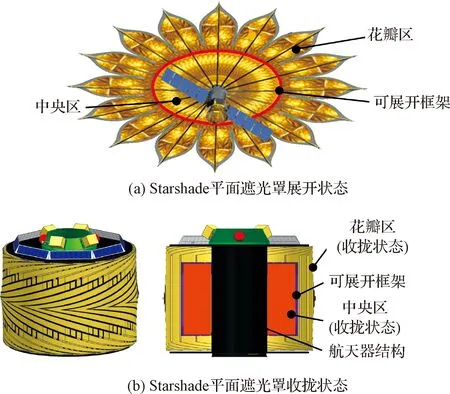
图8 Starshade平面遮光罩Fig.8 Starshade planar sunshield
中央区的薄膜大致呈圆形,可通过flasher折纸技术(见本文第3节)进行折叠,折叠后为一空心柱体,空心处为航天器结构。中央区周围有环形可展开框架,见图9。

图9 Starshade平面遮光罩可展开框架Fig.9 Deployable truss of Starshade sunshield
框架包含长杆、短杆和上、下连接件。上连接件由2个三角形结构按一定角度组合而成,内部有铰链,上连接件上的长杆、短杆可以绕铰链旋转。上连接件上表面有凹槽,长杆在框架展开后可进入凹槽实现位置锁定;下连接件与上连接件类似,但是没有凹槽。上、下连接件内部有动力源驱动长杆、短杆旋转,文献[24-25]未提及驱动方式。
可展开框架的每根长杆一侧贴附中央区薄膜,另一侧贴附花瓣区的一瓣。花瓣区由柔性材料制成。遮光罩收拢时的花瓣区卷在中央区形成的空心柱体周围,如图8(b)所示。航天器入轨后,火工切割器切断可展开框架上、下连接件内部的绳索,长杆、短杆展开,将中央区展开成圆形平面。花瓣区靠自身弹性从折叠时的卷曲状态恢复至平面状态。
2016年Starshade项目制作了带有4片花瓣的可展开框架,实现了框架的展开,但是该展开可行性验证实验过程中,花瓣并未进行卷曲。Starshade平面遮光罩与TPF-O任务的遮光罩结构相似。
Starshade遮光罩的结构设计目前尚未完成。设计者没有说明如何驱动中央区展开至平面。由于中央区半径为10 m,尺寸较大,而上、下连接件体积较小,难以设计有足够驱动力的机构。此外,用柔性材料的微弱弹性来展开花瓣区,展开可靠性和平面度都难以保证。THEIA和Starshade遮光罩直径均为40 m,远超其他平面遮光罩,能保证较大的展收比,但还需要完善设计。
2007年,美国诺斯罗普-格鲁曼公司的Yamane等为詹姆斯·韦伯空间望远镜(JWST)研制了V字型平面遮光罩,它是目前世界上尺寸最大已装航天器的平面遮光罩,如图10所示。
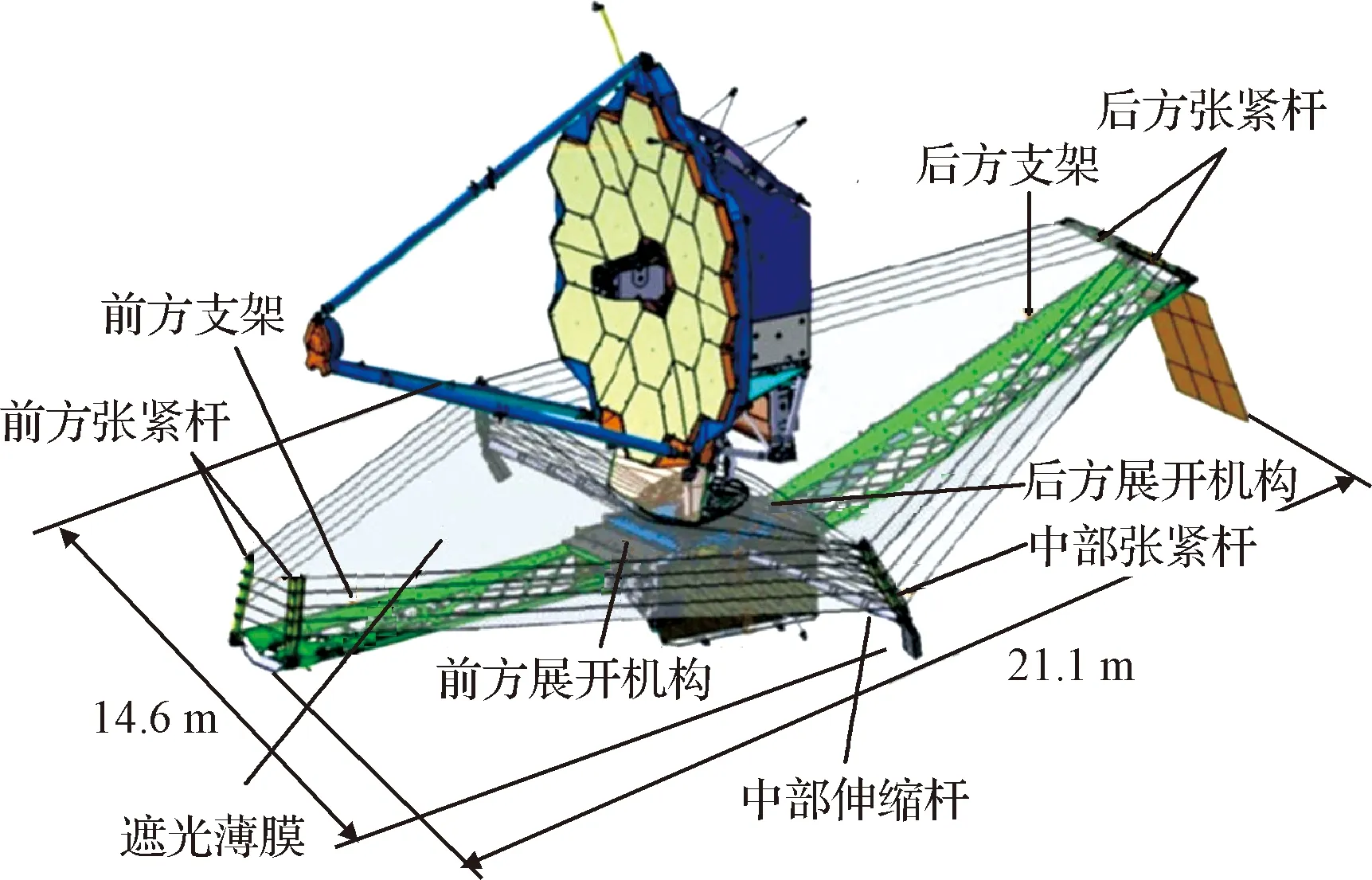
图10 JWST平面遮光罩Fig.10 JWST sunshield
该遮光罩的遮光薄膜采用5层彼此隔离的、覆盖蒸汽沉积铝涂层的聚酰亚胺薄膜,其中,离望远镜最远的2层薄膜的一侧(面向太阳的一侧)又额外涂有硅基涂层。前方支架和后方支架分别通过前方展开机构和后方展开机构与航天器结构相连,展开机构由电机驱动。前方支架和后方支架均呈内侧凹陷状,形如托盘。遮光罩收拢时将薄膜折叠后放入托盘中。2根中部伸缩杆可通过套筒机构伸长。前方张紧杆和后方张紧杆分别固定在前方支架和后方支架上,中部张紧杆固定在中部伸缩杆上,所有张紧杆通过绳索与薄膜相连,并且内部有滑轮组用于张紧薄膜。遮光罩展开时,首先前方支架和后方支架旋转展开,然后中部伸缩杆伸长,将薄膜从托盘内拉出,实现薄膜展开,最后张紧杆内部滑轮组收紧绳索,使5层薄膜张紧。作为JWST遮光罩成果的推广应用,一些正在设计中的空间望远镜,如TALC(Thin aperture light collector)和SAFIR(Single aperture far infrared observatory)也计划用V字型可展开薄膜遮光罩。
JWST遮光罩用2个托盘状框架和2根伸缩杆实现相对简单的展开过程,遮光和隔热能力很强。但是大尺寸的前方支架和后方支架对其结构力学特性设计提出了挑战。多层薄膜在折叠过程中的排气也是一个复杂的技术问题。另外,JWST的遮光罩展开后的长度约等于前方支架与后方支架长度之和,而前方、后方支架在该空间望远镜发射前也要收拢放置于整流罩内部,同样受到整流罩高度的限制,因此JWST遮光罩也难以适应更大的尺寸需求。
表1对不同构型遮光罩的特点进行了比较。
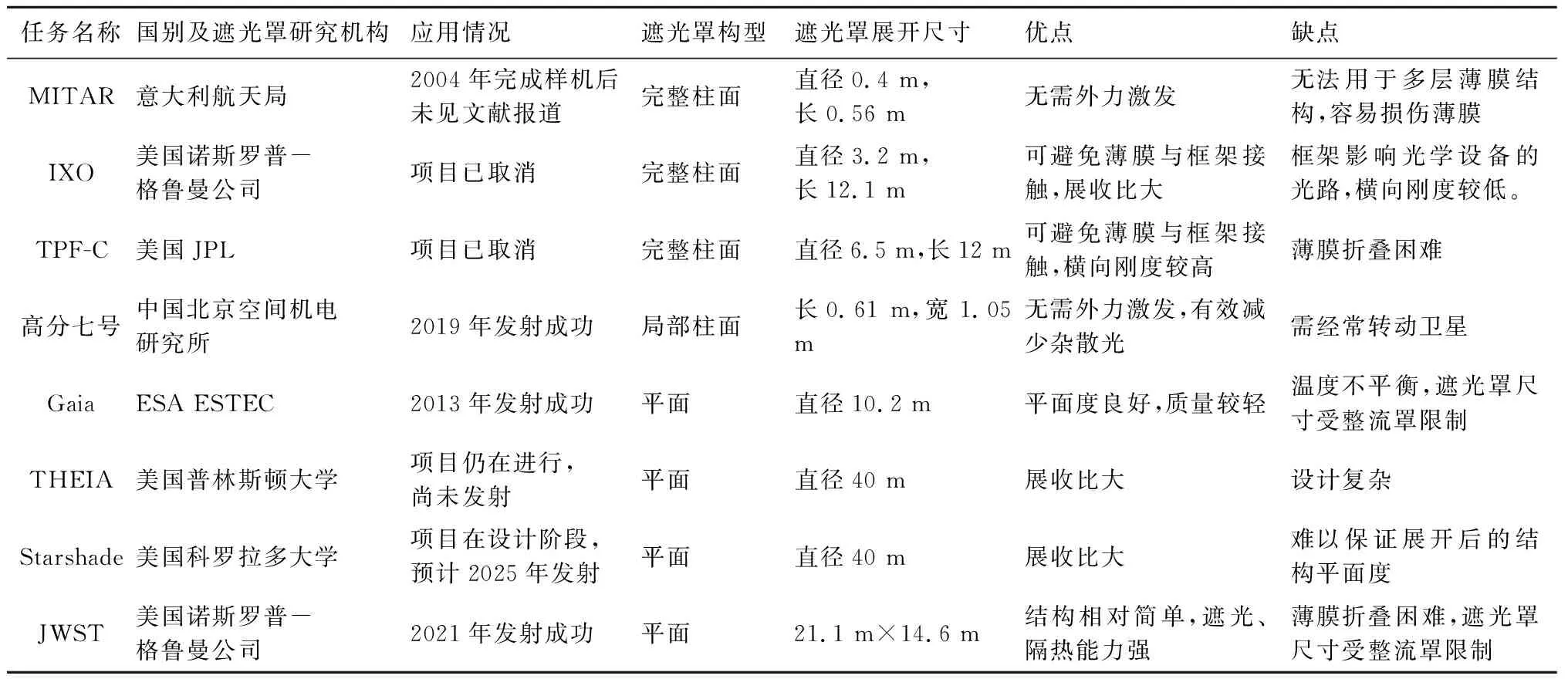
表1 不同构型遮光罩的特点比较Table 1 Comparison of sunshields with different configurations
2 可展开薄膜遮光罩展开驱动技术的发展
可展开薄膜遮光罩的可展开框架目前主要有电机驱动、弹性自驱动和充气驱动3种展开驱动方式。
2.1 电机驱动展开
除了前文提到的IXO和TPF-C柱面遮光罩以及Gaia和JWST平面遮光罩均采用电机驱动展开外,图11~图13展示的柱面遮光罩及图14展示的平面遮光罩也采用了电机驱动。
2013年,上海卫星工程研究所薛景赛等设计了电机驱动3级套筒柱面遮光罩,如图11所示。

图11 电机驱动3级套筒柱面遮光罩Fig.11 Motor-driven cylindrical 3-sleeve sunshield
该遮光罩使用了半径逐级增大的3级套筒。筒框内侧贴附遮光薄膜,套筒外侧安装了由5个菱形杆系组成的驱动组件。在电机驱动下,菱形的纵向尺寸增大横向尺寸减小,驱动组件整体纵向伸长并将套筒逐级拉出,实现展开。该设计相对简单,但套筒展开过程存在薄膜被剐蹭的风险。
2019年,安继萍等设计的电机驱动三维展开柱面遮光罩见图12(a),能够在轴向和径向同时展开柱面遮光薄膜。该遮光罩的底部和顶部具有不同的展开机构,如图12(b)和(c)所示。
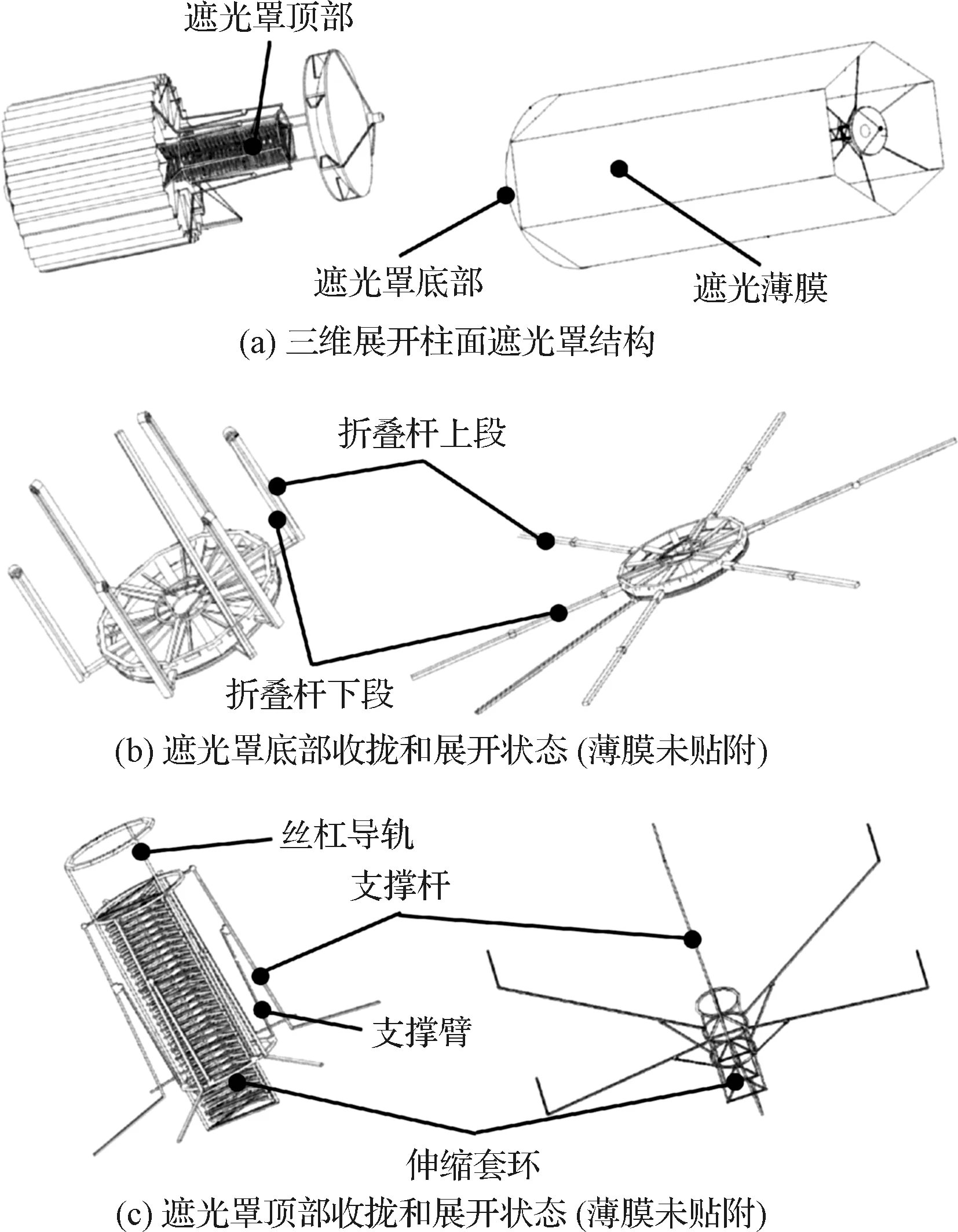
图12 电机驱动轴向和径向同时展开的柱面遮光罩Fig.12 Motor-driven cylindrical sunshield deployable in axial and radial direction
遮光罩底部有6根折叠杆,每根杆分上段和下段。遮光罩顶部中心处为一系列伸缩套环。遮光薄膜一端连接底部的折叠杆上段,另一端连接顶部的支撑杆。支撑臂可以推动支撑杆绕最顶端的伸缩套环旋转。卫星入轨后,遮光罩底部的折叠杆上段和下段在电机驱动下由折叠状态展开为伸直状态,展开后的6根杆的末端连线构成正六边形。遮光罩顶部通过“丝杠-导轨”驱动伸缩套环伸展,实现遮光罩纵向伸长。当“丝杠-导轨”到达预设位置,支撑臂会推动支撑杆旋转,实现遮光罩顶部展开。完全展开后的遮光薄膜形状为六棱柱面。该遮光罩展开面积较大,但是整个机构包含多组不同的电机,展开过程要求这些电机按规定顺序和速度运动。机构组成复杂,基本可靠性较低。展开后伸缩套环位于遮光罩内部,会遮挡光路。
2020年中国科学院上海技术物理研究所吴春亮等设计了电机驱动的3杆系及圆环遮光罩薄膜展开装置,见图13。遮光薄膜位于顶环和底环之间,3组杆系位于遮光薄膜外侧。每组杆系的主动杆连接电机,并与从动杆铰接,从动杆与顶环铰接。“电机—主动杆—从动杆—顶环”这一曲柄滑块机构的运动带动薄膜展开,当主、从杆共线时,遮光罩展开到位并锁定。该3组杆系间无横向连接,故横向刚度较低。

图13 电机驱动3杆系柱面遮光罩Fig.13 Motor-driven cylindrical 3-boom-system sunshield
2008年JPL的Williams等提出的平面遮光罩也采用电机驱动来实现展开,如图14(a)所示。该遮光罩具有6根折叠杆和6根张紧杆,张紧杆连接3层遮光薄膜,每层遮光薄膜为六边形,越靠近折叠杆的薄膜面积越大。每根折叠杆一端连接航天器结构,另一端连接一根张紧杆。折叠杆分2段,2段折叠杆之间、折叠杆与航天器结构连接处以及折叠杆与张紧杆连接处均有电机。图14(b)为展开过程的局部剖面图,首先折叠杆在电机驱动下从折叠状态伸直,展开遮光薄膜,然后张紧杆抬起,张紧薄膜。该设计也需解决收拢状态下遮光薄膜间残余气体的排出问题。

图14 电机驱动平面遮光罩Fig.14 Motor-driven planar sunshield
电机驱动以其技术成熟、展开冲击较小、锁定能力强、展开过程精确可控等优点备受航天器遮光罩设计者的青睐。但是,电机驱动需要依赖电机、驱动控制器的可靠性,一旦出现供电故障,上述所有优点都将无法显现。
2.2 弹性自驱动展开
弹性自驱动展开是依靠弹性材料自身弹性来展开的。这与传统的拉压弹簧驱动的直线展开及涡卷弹簧驱动的旋转展开有明显的区别:在弹性自驱动展开过程中,弹性材料本身既是驱动源又是被展开对象。弹性自驱动机构中,“豆荚杆”相比带簧铰链质量更轻,但展开驱动力和自锁能力相对较弱,适用于展开尺寸为0.1 m~1 m的遮光罩;带簧铰链适用于展开尺寸为1 m~5 m的遮光罩。在传统的弹簧驱动展开中,弹簧只是驱动源,并非被展开对象;传统的弹簧驱动虽结构简单,但展开尺寸有限,适用于展开尺寸小于0.1 m的遮光罩。
2018年,长光卫星技术有限公司张雷等设计了弹簧+弹性自驱动可展开薄膜遮光罩,如图15所示。遮光薄膜连接上安装座和下安装座,弹簧位于遮光薄膜内侧。同时,下安装座外侧的4个容器内均安装有弹性自驱动卷尺弹簧。遮光罩处于收拢状态时,通过绳索来把上安装座固定在下安装座上,绳索经过下安装座外侧的火工切割器。当卫星入轨后,火工切割器发火并切断绳索,上安装座在弹簧推动下沿轴向移动,同时展开卷尺弹簧。卷尺弹簧伸直后具有一定刚度,固定了遮光罩展开后的形状。

图15 弹簧+弹性自驱动展开柱面遮光罩Fig.15 Cylindrical sunshield deployed by springs and elastic self-driving mechanism
2020年,北京航空航天大学白江波等设计了复合材料弹性自驱动展开的遮光罩,该设计与张雷等的设计相类似。2020年,中国空间技术研究院总体设计部林秋红等设计了复合材料波纹板弹性自驱动展开的遮光罩, 4条彼此独立的复合材料波纹板驱动遮光罩展开,但波纹板间无横向连接,该遮光罩横向刚度和稳定性不高。
带簧铰链是将多条带簧通过压板并排连接构成的机构,如图16所示。由于可以安装较多带簧,带簧铰链伸直后的刚度较高,能够用于较大尺寸遮光罩的展开。蒋范明等和Warren等分别设计了带簧铰链展开的局部柱面遮光罩,展开高度可达5 m。
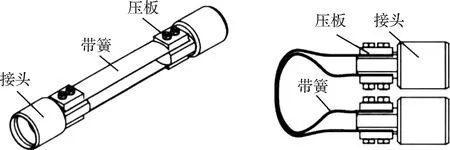
图16 带簧铰链Fig.16 Tape spring hinge
“豆荚杆”由2片“Ω”形弹性薄壳对称胶黏或焊接连接而成,弹性薄壳常用材料为铍青铜、钢带或复合材料,如图17所示。当“豆荚杆”翻折时,翻折处可以等效于仅有两条带簧的带簧铰链。Pica在MITAR遮光罩高分子胶粘接2片钢带制作“豆荚杆”的过程中发现机构存在蠕变现象,无法长期贮存,而且高分子胶在空间环境下易发生性能退化。曹旭等在高分七号卫星遮光罩上采用了由2片铍青铜焊接而成的“豆荚杆”,提高了空间环境适应性和抗蠕变性。
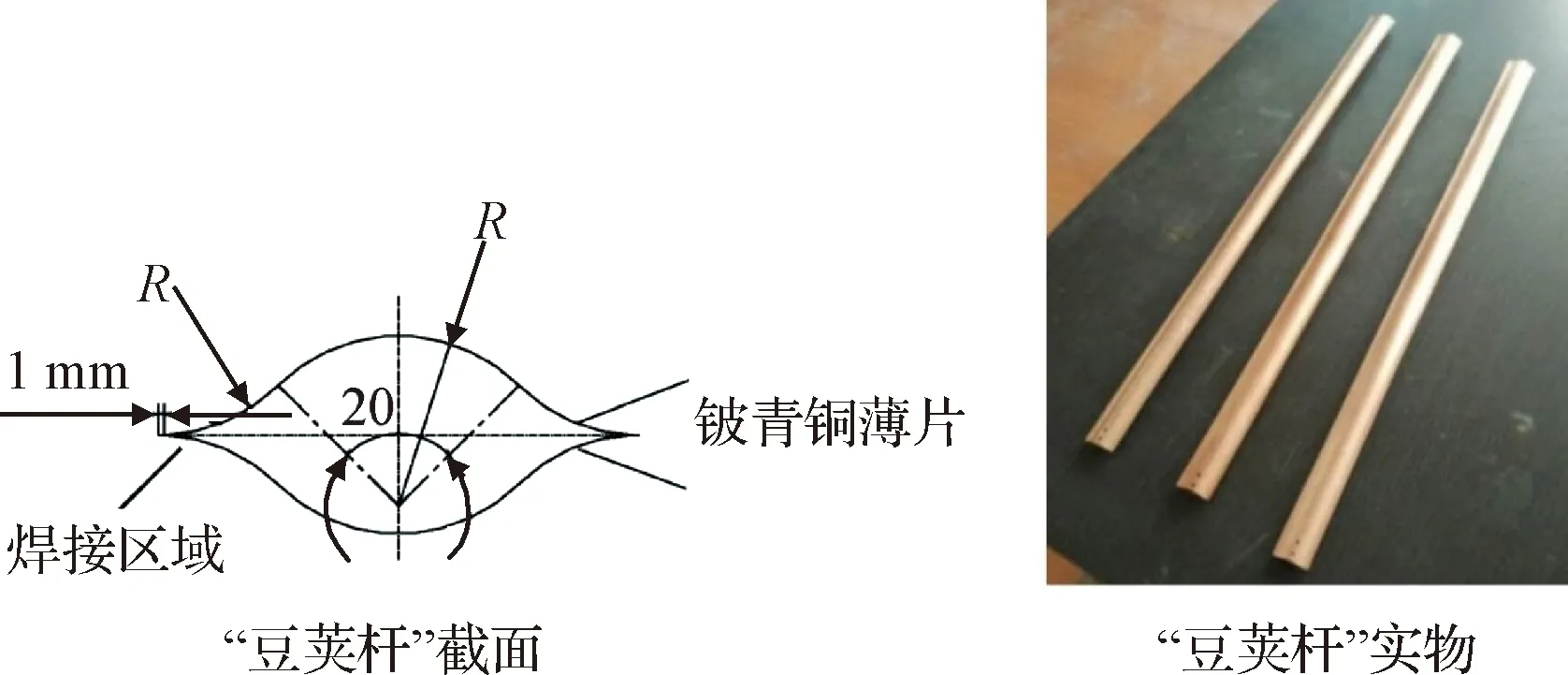
图17 “豆荚杆”Fig.17 Lenticular boom
弹性自驱动展开无需额外的供能系统,组成简单,基本可靠性高,在可展开薄膜遮光罩上具有良好的应用前景。其主要缺点是展开过程产生的冲击对光学设备有一定影响,需进行影响评估。
2.3 充气驱动展开
充气驱动具有质量轻、空间利用率高、设计简单、零件少等优点,但也存在充气刚化一些固有的缺点。为了克服这些缺点,多年来美国L’Garde公司和JPL等研究机构一直在充气刚化方面努力来增加充气杆的展开刚度。充气刚化存在多种方法,但每种刚化方法都有其限制条件。
1995年JPL的Tsuyuki等设计了充气杆展开的局部柱面遮光罩。2011 年浙江大学徐彦等设计的充气展开柱面遮光罩,如图18(a)所示,包含5个充气刚化铝箔横向充气环和4根纵向充气杆。纵向充气杆在充气刚化铝箔内部贴附4根钢卷尺。用胶带对铝箔进行密封,纵向杆的截面图和实物图见图18(b)。2014年北京空间机电研究所曹旭等设计的充气展开薄膜遮光罩与徐彦等的设计相类似,每根纵向充气杆用2根卷尺进行加强。2017年西安电子科技大学杜敬利等设计的充气展开薄膜遮光罩,除了用与文献[39-40]相类似的横向充气环和纵向充气杆外,还安装了绳索和绳索控制模块用于调整遮光罩方向,控制展开精度。

图18 充气驱动展开柱面遮光罩Fig.18 Cylindrical sunshields deployed by inflation
在平面遮光罩充气驱动方面,JWST早期计划用充气刚化杆件实现展开,且ILC Dover公司还制作了缩比样机,但后续进展未见文献报道。
充气驱动有望用于大尺寸薄膜遮光罩的展开,但目前的充气刚化技术还不能很好满足航天器薄膜遮光罩的工程需求,存在精度不高、需要额外能量、充气刚化后刚度较低、展开过程不易控制等问题。铝箔在加工过程中易产生针眼型孔洞,可能造成气体喷出改变航天器的方向。虽然充气驱动展开后的遮光罩可用绳索维持,但因遮光罩自身刚度较低,绳索控制能力也十分有限。
表2展示了几种薄膜遮光罩展开驱动方式的对比。

表2 不同展开驱动方式的特点比较Table 2 Comparison of different deploying driving methods
3 可展开薄膜遮光罩薄膜折痕设计的发展
对于诸如MITAR正八棱柱柱面遮光罩、高分七号卫星局部柱面遮光罩等展开长度在1 m以内的遮光罩,薄膜的面积相对较小,若选用面密度较大、厚度较大、拉伸强度较高的薄膜不会明显增加遮光罩的体积和质量。然而,对于诸如JWST平面遮光罩等长度超过10 m的遮光罩来说,薄膜材料面密度、厚度等参数的选择就尤为重要。为减小遮光罩质量和收拢体积,需尽可能选用较薄的遮光薄膜。同时需解决由此带来的新的技术难题:
1)大面积多层薄膜折叠时薄膜间残余气体的排出问题。该问题直接影响遮光罩的收拢体积;
2)适应厚度较薄的薄膜低拉伸强度的应力集中规避问题。该问题直接影响薄膜展开张紧过程中撕裂损坏的可能性;
3)大面积薄膜遮光罩展开过程的薄膜防缠绕问题。
这些技术问题的解决都与薄膜折痕设计有关。
为将JWST平面遮光罩的薄膜收拢到前方支架和后方支架的托盘中,对薄膜采用Z字型对折方式收起,但没有很好解决残余气体的排出问题。
Starshade平面遮光罩应用了flasher折法,其折痕和模型见图19。该种折法包括沿径向的一级折痕和一级折痕上引出的二级折痕。一级折痕能将遮光薄膜卷成空心柱体,二级折痕能减少这个柱体的高度。flasher折法中的折痕相对较短,从而缩短了遮光罩收拢时薄膜上任意一点距离外界的距离,有利于残余气体的排出。调整二级折痕的位置可控制薄膜折起后柱体的高度和半径,具有一定的可设计性。但是当薄膜面积较大时,展开过程中外侧的框架需要提供较大的驱动力,这使得折痕设计难度增加。
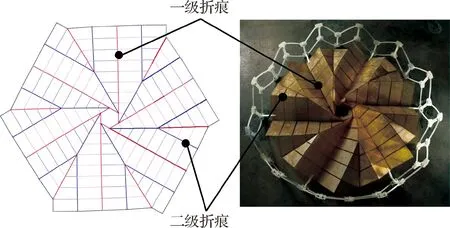
图19 Flasher折法Fig.19 Flasher origami pattern
IXO棱柱柱面遮光罩拟采用折纸技术来设计遮光薄膜的折痕。设计过程中考虑了Kresling折法、变角度Miura折法和Tachi-Miura折法,见图20(a)和(b)。图20给出的折痕图中实线为峰线,虚线为谷线。2016年,美国宾夕法尼亚州立大学Morgan等通过实验对这3种折法进行了比较。Tachi-Miura折法的横截面形状在展开过程中会发生变化,按该折法折叠的薄膜可能会与柱面内的光学设备接触。另外,展开后的柱面稳定性较差。Kresling折法与变角度Miura折法相比,相同高度和半径的柱面按照Kresling折法折起后高度更低、展收比更大。

图20 Kresling、变角度Miura和Tachi-Miura折法Fig.20 Kresling, Miura and Tachi-Miura origami patterns
根据展收比的优势,IXO棱柱柱面遮光罩在3种折法中选择了Kresling折法。但是该遮光罩在设计过程中并未涉及应力分布、展开速度等问题研究,因此Kresling折法是否是为柱面遮光薄膜的最佳折叠方法还有待于进一步研究。
虽然折纸技术已经在遮光罩领域得到了应用,但是这些应用对折纸结构的模拟主要集中在几何学、运动学领域,而薄膜应力集中问题、薄膜展开速度不均匀性问题和多层薄膜层间残余气体排出问题尚未得到深入研究,有可能成为未来遮光罩折痕设计的研究方向。折痕设计中单元的长度、角度等参数对应力分布有较大影响,因此将单元的参数作为输入,将应力集中情况、展开速度等遮光罩性能指标作为输出,求解多目标优化问题,有望优化遮光薄膜的折痕设计。
4 可展开薄膜遮光罩薄膜褶皱动力学分析的发展
可展开薄膜遮光罩在设计过程中需要计算薄膜的动力学特征。但是,薄膜在外力作用下极易因局部屈曲而引起在薄膜的垂直面上的变形,进而发展成褶皱。褶皱会改变薄膜上的应力分布,对薄膜结构的动力学特性产生影响,并且降低薄膜的平面度,改变反射率、吸收率等参数,最终使遮光罩的遮光性能发生变化。因此,仿真求解褶皱状态下薄膜的形状和动力学特征是可展开薄膜遮光罩设计的重要问题。目前对褶皱的分析主要有基于张力场理论的分析方法和基于屈曲理论的分析方法。
基于张力场理论的薄膜褶皱动力学分析始于1961年Stein和Hedgepeth提出的预测局部褶皱薄膜应力和应变特征的早期理论。该理论通过在褶皱区域引入一个可变泊松比来修正薄膜褶皱区域的应力关系,从而得到新的张力场。1964 年Mikulas用该理论分析了张紧薄膜承受扭转载荷时的褶皱行为,发现可变泊松比理论计算得到的结果与实际较相符,验证了该理论在特定场景下的正确性。但基于可变泊松比的方法需预先假设褶皱区域的位置,难以满足工程需求。而且Hedgepeth的可变泊松比算法在材料泊松比满足特定条件时会不收敛。
有限元法出现后,基于张力场的分析方法得到了进一步发展。20 世纪80 年代,Miller等提出了模拟薄膜的有限元分析法,称为迭代薄膜特性方法(IMP),采用新的可变泊松比算法,并且将薄膜分为张紧区、松弛区和褶皱区,根据第一主应变和第二主应变的正负性来判断区域是否发生褶皱或松弛并代入可变泊松比,然后重新计算张力场,经过反复迭代得到薄膜的动力学特征。2001年,Adler在Miller工作的基础上,将IMP方法嵌入了ABAQUS。用该方法求解褶皱比较准确,已成为薄膜模拟中常用的方法之一。例如,基于IMP方法计算得到的JWST遮光罩薄膜的模态与实验测得的结果误差在5% 以内。但是后来发现,当存在较多松弛区域时,该模型的收敛性较差。
2019年,复旦大学Wang等证明了当泊松比极小时褶皱无法形成,与IMP方法计算结果矛盾,说明IMP方法不适用于泊松比极小的情况。
基于张力场理论能够划分出褶皱区域,但无法得到褶皱的波长和幅值等具体的形状特征,进而妨碍了对遮光罩遮光性能的分析。为了求解褶皱的形状,在仿真分析时需考虑薄膜微小的弯曲刚度,将薄膜的褶皱行为处理为薄壳的屈曲行为,从而根据屈曲理论分析薄膜的动力学特征。尤其对于航天常用的聚酰亚胺薄膜来说,其弯曲刚度相对较大,适宜采用薄壳分析模型。屈曲理论需要在薄膜平面上引入几何缺陷,然后使表面受力平衡,此时几何缺陷会延伸成为褶皱。几何缺陷的位置和实际发生褶皱的位置越接近,模拟的真实性越好。
2002—2003年,英国剑桥大学Wong和Pellegrino提出了非线性屈曲分析方法。该方法首先求解受力薄膜刚度矩阵的特征值和特征向量,得到薄膜的屈曲模态,随后将屈曲模态作为几何缺陷引入初始表面,表面稳定后可以得到薄膜的褶皱形状。这种方法需要根据受力状态求解刚度矩阵,当受力状态和薄膜形状比较复杂时计算难度较大。为了突破这一限制,需用其他方法引入几何缺陷。2003年,美国肯塔基大学Leifer在薄膜平面上施加一系列与膜垂直的等大反向、作用点不同的力,得到零合力下薄膜的几何缺陷状态。2004年,美国NASA兰利研究中心Tessler在平面上施加随机的面外位移来引入几何缺陷。根据Wong和Pellegrino的仿真和实验,对于在每个角施加相同载荷的方形薄膜,受力状态较简单,可求得受力薄膜刚度矩阵的特征值和特征向量,基于特征向量引入几何缺陷的方法模拟精度高于其他两种方法。
2000—2003年,美国霍夫公司的Liu等试图结合张力场理论与屈曲理论,提出了薄膜仿真的两步分析方法。该方法首先根据张力场理论预测褶皱区域的范围和应力分布,然后应用非线性屈曲分析法中求解屈曲模态的步骤来确定褶皱的数量,用非线性屈曲分析法得到的褶皱波长和幅值与应力的关系最终得到褶皱的形状。这种方法避免了非线性屈曲分析法中引入几何缺陷的步骤,简化了计算过程。经过实验验证,两步分法能够准确地模拟正方形膜受到特定拉伸和剪切时的情况。然而,Liu的两步分析法无法避开求解刚度矩阵的步骤,因此同样面临和非线性屈曲分析法一样的局限性,不适用于较复杂的薄膜形状和受力状态。
2017年,日本鸟取大学Iwasa提出了在张力场理论基础上根据屈曲理论直接计算褶皱波长和幅值的方法,但它只能适用于特定应力分布的薄膜。
目前对薄膜遮光罩的工程实践来说,基于张力场理论的分析方法已经能够比较精确地得到薄膜的动力学特性和褶皱区域等特征。但是,为了求解褶皱的形状,必须采用基于屈曲理论的分析法,而现有基于屈曲理论的分析法往往有较多的假设和简化,这些方法存在较大的局限性。
5 航天器可展开薄膜遮光罩机械设计的发展趋势
综上所述,航天器可展开薄膜遮光罩机械设计具有如下发展趋势。
1) 柱面遮光罩适用于和太阳相对位置经常改变的航天器。技术较成熟,应用较多。虽局部柱面遮光罩能有效减少特定方向的杂散光,但需转动遮光罩或航天器,系统复杂、能耗较大。未来柱面遮光罩的发展方向是具有挡光环的完整柱面遮光罩。
2) 平面遮光罩适用于和太阳相对位置不变的航天器,尤其适用于太空望远镜。大尺寸、大展收比的平面遮光罩是需进一步研究的一个发展方向。
3) 电机驱动展开是当前大尺寸遮光罩(> 5 m)的主流发展方向;弹性自驱动展开适合较小尺寸遮光罩(< 5 m);充气驱动是有潜力应用于大尺寸遮光罩展开的驱动方式,随着充气刚化技术的逐步成熟,它将成为未来新的研究热点。
4) flasher折法和Kresling折法分别是目前平面遮光罩和柱面遮光罩薄膜折叠的主流方法。期待有更好的柱面遮光罩薄膜折叠方法应用于工程。薄膜应力集中问题、薄膜展开速度不均匀性问题有待深入研究,有可能成为折痕设计的研究方向。
5) 基于张力场理论的薄膜褶皱分析方法是工程中比较精确的主流分析方法;求解褶皱形状所用的基于屈曲理论的薄膜褶皱分析方法还需深入研究,使其更加接近实际而不过分依赖简化和假设。
6 结束语
基于国内外航天器可展开薄膜遮光罩的几何构型、展开驱动技术、薄膜折痕设计和薄膜褶皱动力学分析四个方面的发展,指出了不同几何构型遮光罩的适用场合,对可展开薄膜遮光罩机械设计的发展趋势进行了展望,提出了需要深入研究的关键技术,为航天器可展开薄膜遮光罩的研究提供参考。
