Secure Bipartite Tracking Control for Linear Leader-Following Multiagent Systems Under Denial-of-Service Attacks
2022-08-13LuluChenLeiShiQuanZhouHanminShengandYuhuaChengSenior
Lulu Chen, Lei Shi,, Quan Zhou, Hanmin Sheng, and Yuhua Cheng, Senior
Dear editor,
This letter puts forward a secure feedback control scheme to bipartite tracking consensus for a set of generic linear autonomous agents subject to aperiodic and unknown denial-of-service (DoS)attacks. In contrast to the DoS attack model that disables all transmission channels simultaneously, we are concerned with a general DoS attack model with independent attacks over each transmission channel. Such malicious attacks not only destroy the connectivity of underlying network, but also induce the dynamic transmission of reachable information. A time-varying error system is built upon the proposed distributed controller and the designed feedback matrix. A sufficient condition in terms of the frequency and duration of DoS attacks is developed with the assistance of some techniques from graph theory and non-negative matrix theory such that the state error is guaranteed to asymptotically approach zero. In particular, our results are proved to be applicable for a class of multiagent systems (MASs) with the strictly unstable system matrix.
The resource advantages and huge developmental potentials of MASs have been demonstrated in industrial applications, especially in performing distributed tasks including traffic management, search and rescue, multi-unmanned aerial vehicle (UAV) patrol, while these tasks are usually difficult to be completed by an agent alone. There is a growing body of research devoted to the collaboration of multiple autonomous agents [1]−[4].
The network topology is considered to be one of the key factors that dominate the final behavior of the participating agents.Compared with the cooperative networks, signed networks can be seen everywhere, like social networks [5] and neural networks. The recent years have witnessed an increasing trend towards investigating the bipartite tracking consensus emerging from signed networks with single leader [6]−[9].
MASs in real-world networks are vulnerable to different cyber attacks that threaten their performance and stability. DoS attack,aiming at blocking and interrupting the information transmission by jamming the communication channels on MASs, is the current way of an attack widely adopted. Most of the existing papers involving MASs under DoS attacks [10]−[12] focus on the fully cooperative networks and/or the case of paralyzing all transmission channels simultaneously. There is a lack of concerns on the MASs with antagonistic interactions and independent attacks over multiple transmission channels.
The above motives inspire us to investigate the problem of secure bipartite tracking control of generic linear agents in the presence of DoS attacks. The extensions from the bipartite tracking consensus of integrator agents to that of generic linear agents are technically hard.Moreover, the existing secure control approaches [10]−[13] are not applicable to this study. We first propose an effective secure feedback control scheme for the considered general DoS attack model. Then we establish time-varying error system based on the dynamic information flows under attacks. Finally, we present the mild sufficient condition associated with the frequency and duration of attacks by means of graph theory and nonnegative matrix theory.The system matrix is relaxed to be strictly unstable and we give an explicit expression of the upper bound of its spectral radius.

Fig. 1. Illustration of DoS attacks.


Fig. 2. The underlying communication topology G.
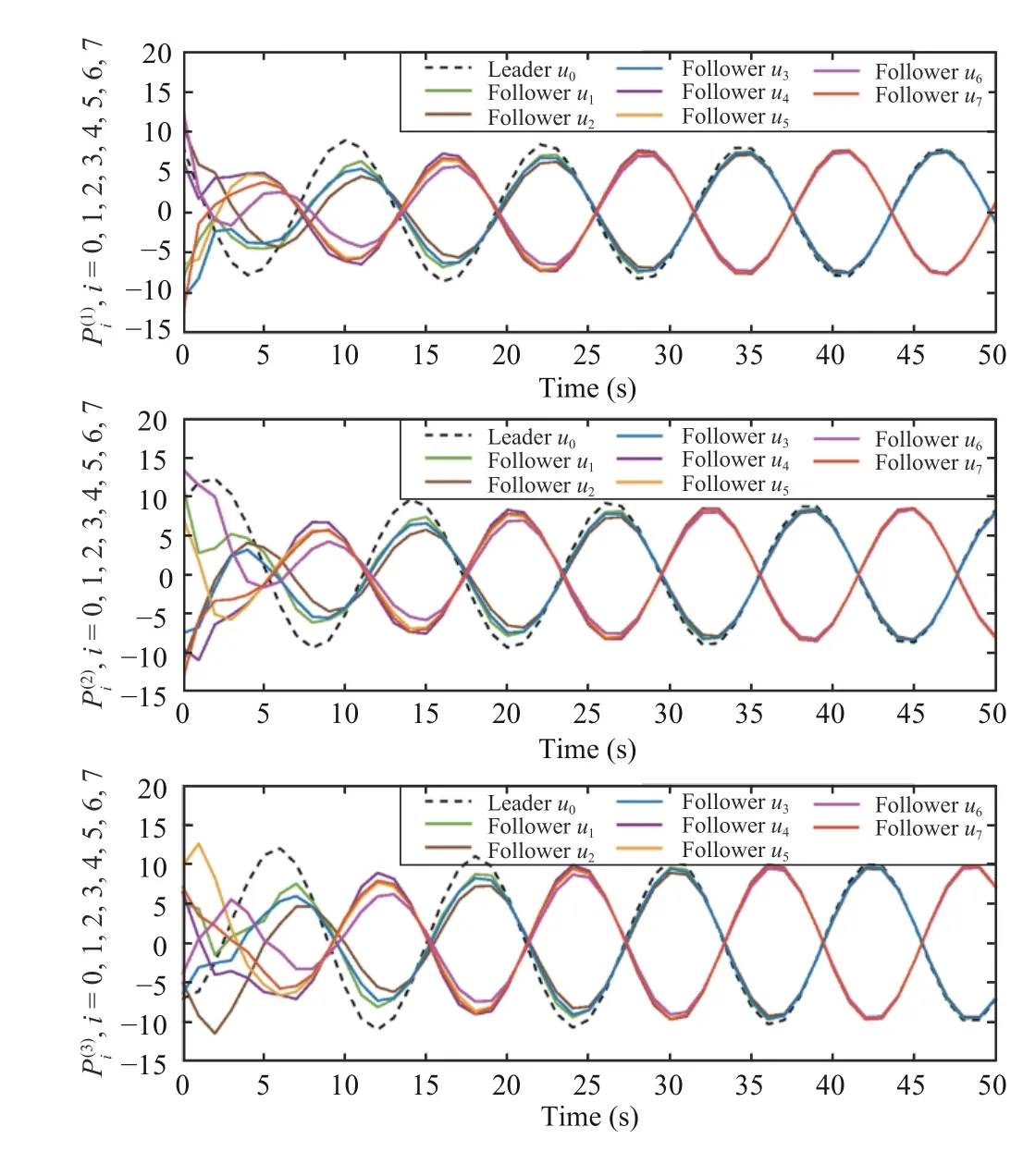
Fig. 3. The states tracking of single leader and multiple followers.
Conclusions: The secure bipartite tracking control has been investigated for generic linear MASs under the aperiodic and unknown DoS attacks in this letter. A general DoS attack model with independent attacks over multiple transmission channels has been considered. A secure feedback control scheme and the effective parameter selection strategy have been proposed. Applying some properties of non-negative matrix theory and graph theory, a sufficient condition involving the frequency and duration of DoS attacks has been derived, and the system matrix has been proven to be strictly unstable.
Acknowledgments: This work was supported in part by the National Science Foundation of China (U1830207, 61772003, 6190 3066), the Natural Science Foundation of Sichuan Province (2022 NSFSC0878), the National Postdoctoral Program for Innovative Talents (BX2021056), the Sichuan Science and Technology Program(2021YFH0042), the National Natural Science Foundation of China(6210021010), and the funding from Shenzhen Institute of Artificial Intelligence and Robotics for Society.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Consensus Control of Multi-Agent Systems Using Fault-Estimation-in-the-Loop:Dynamic Event-Triggered Case
- A PD-Type State-Dependent Riccati Equation With Iterative Learning Augmentation for Mechanical Systems
- Finite-Time Stabilization of Linear Systems With Input Constraints by Event-Triggered Control
- Exploring the Effectiveness of Gesture Interaction in Driver Assistance Systems via Virtual Reality
- Domain Adaptive Semantic Segmentation via Entropy-Ranking and Uncertain Learning-Based Self-Training
- Position Encoding Based Convolutional Neural Networks for Machine Remaining Useful Life Prediction