A Novel PDF Shape Control Approach for Nonlinear Stochastic Systems
2022-08-13LingzhiWangGuoXieFucaiQianJunLiuandKunZhang
Lingzhi Wang, Guo Xie,, Fucai Qian, Jun Liu, and Kun Zhang
Abstract—In this work, a novel shape control approach of the probability density function (PDF) for nonlinear stochastic systems is presented. First, we provide the formula for the PDF shape controller without devising the control law of the controller.Then, based on the exact analytical solution of the Fokker-Planck-Kolmogorov (FPK) equation, the product function of the polynomial and the exponential polynomial is regarded as the stationary PDF of the state response. To validate the performance of the proposed control approach, we compared it with the exponential polynomial method and the multi-Gaussian closure method by implementing comparative simulation experiments.The results show that the novel PDF shape control approach is effective and feasible. Using an equal number of parameters, our method can achieve a similar or better control effect as the exponential polynomial method. By comparison with the multi-Gaussian closure method, our method has clear advantages in PDF shape control performance. For all cases, the integral of squared error and the errors of first four moments of our proposed method were very small, indicating superior performance and promising good overall control effects of our method. The approach presented in this study provides an alternative for PDF shape control in nonlinear stochastic systems.
I. INTRODUCTION
MOST control systems are subject to inevitable random noise interference, or their model parameters drift in a random form. Therefore, deterministic systems almost do not exist in nature. So, each system can be considered as a random system. For the convenience of mathematical processing,random uncertainty is often ignored when random uncertainty does not play a leading role, and a deterministic system is used to approximate the real system. In stochastic systems, the common stochastic control methods take the mean value of the performance index as the control objective [1]; nevertheless, this method cannot inhibit the volatility caused by random factors. Variance and higher-order moments can suppress this volatility, resulting in a large number of remarkable research results to solve volatility problems, such as variance control and risk-sensitive control [2]–[4]. However, variance control only controls the second-order moment of the performance index, but not its higher-order moment. Risksensitive control attempts to control the weighted sum of each order moment by adjusting a risk-sensitive coefficient, but it cannot guarantee that each order moment of the performance index can be controlled to the desired form. The fundamental method to solve this problem is to control the complete statistical characteristics of random variables. For stochastic systems, the complete statistical characteristics of random variables are contained in the shape of the probability density function (PDF), so controlling the PDF shape means that the mean, variance and other high-order moments of random variables are controlled. The shape of PDF contains all information on process dynamics, system disturbance, and nonlinearity. Therefore, compared with the traditional mean,variance, and risk-sensitive control, controlling the shape of PDF can better reflect the complete statistical characteristics of random variables and has more research significance.
References [5]−[14] have conducted in-depth research on PDF shape control and achieved prominent research developments. They mainly use B-spline technology, minimum entropy technology, and linear matrix inequality (LMI) technology to propose PDF shape control schemes, obtain the controller that makes the output PDF shape approach the target PDF shape, and effectively solve the PDF shape control problem of stochastic systems. However, these methods are aimed mainly at linear stochastic systems and are not suitable those that are nonlinear.
Stochastic dynamic systems exhibit strong or weak nonlinear behaviors due to various nonlinear factors, so most stochastic dynamic systems are nonlinear [15]–[17]. A central problem in studying nonlinear systems is the response of nonlinear stochastic dynamical systems. Studies on random response, such as those on random response prediction and control and dynamic reliability estimation [18]–[20], have been implemented using the statistical characteristics of the random response. As stated previously, the PDF shape can describe the complete statistical characteristics of random response; therefore, the research of PDF shape control has important value in nonlinear systems [21].
One approach to obtaining the PDF shape control of nonlinear stochastic systems is through the use of approximate methods [22]–[28]. Examples of this approach include the equivalent linearization method, Gram-Charlier expansion approximation, and multi-Gaussian closure method, etc. The resulting PDF shape controller from these approximate methods may be inaccurate. Another way is to determine the exact analytical solution of the Fokker-Planck-Kolmogorov(FPK) equation [29]–[32]. The control effect of the latter is more accurate than the former. The FPK equation reflects the evolution law of the state in time and space in dynamic systems, so it is an important tool to analyze the state response of nonlinear stochastic systems. The FPK equation method is the most rigorous theoretical solution in nonlinear stochastic dynamic analysis. However, in the FPK equation it is required that the excitation is Gaussian white noise and the state variable is a Markov process. Due to the rigorous theory of this method, it is difficult to obtain the analytical solution of the FPK equation. In the literature [31], we developed a detailed process of solving the FPK equation and obtained the general solution of the FPK equation. For simplicity, we only used one solution with an exponential polynomial form as the stationary PDF of the state response and abandoned the other solution due to its complex structure.
In this paper, we propose a novel PDF shape control approach based on the exact analytical solution, which is more reliable and persuasive than other approximate methods. First,the expression of the controller is obtained by the FPK equation without designing the specific form of the controller.Then, according to one of the exact solutions of the FPK equation, the PDF expression of the state response is determined. From the curves of the probability density function and cumulative distribution function (CDF), the integral of square error, and errors of the first four moments (mean, variance, the third moment, and the fourth moment), the performance of the proposed method were then analyzed by comparing the results with the exponential polynomial and multi-Gaussian closure methods.
The main contributions and improvements of this study are summarized as follows:
1) The proposed method does not set the form of the controller, so it is suitable for any nonlinear stochastic system.
2) The PDF shape control approach is proposed upon the exact analytical solution, and thereby is more accurate and dependable than other approximate methods.
3) The stationary PDF of the state response is composed of the polynomial and exponential polynomial, so the method is fit for different target probability density distributions.
The remainder of the paper is arranged as follows. We work out the formula for the PDF shape controller and the stationary PDF expression of the state response in Section II.We provide the steps for solving parameters and the simulation results in Section III. Then we make a detailed analysis of the results and evaluate the proposed approach in Section IV.Finally, we conclude the paper in Section V.
II. PROBLEM STATEMENT
Consider a one-dimensional continuous nonlinear control system excited with random noise

III. CASE STUDY
To properly evaluate the performance of three PDF shape control methods, in each case study, the exponential polynomial method and the proposed method had the same number of parameters to be solved, and the multi-Gaussian closure method was composed of two Gaussian functions.
A. Case 1
The target PDF is a symmetrical unimodal distribution, take the Gaussian distribution for example
This may be related to the fact that the target PDF has a Gaussian distribution and that some parameters are approximately 0 (a1≈a2≈0) after being optimized. For the Gaussian target PDF, only four parameters are needed to make the actual PDF track the target PDF. When the polynomial parameters other than the constant term in (25) are equal to zero, the exponential polynomial method becomes a special case in our method.
We compare the PDF shape control effect of the proposed approach with those of the exponential polynomial method and multi-Gaussian closure method (see Fig. 1). PDF-EP (blue line) is the actual PDF based on the exponential polynomial method, PDF-MGC (green line) is the actual PDF based on the multi-Gaussian closure method, and PDF-PEP (black line)is the actual PDF based on the proposed method (i.e., the product of the polynomial and exponential polynomial).
B. Case 2
The target PDF is an asymmetrical unimodal distribution.With the Beta distribution as example

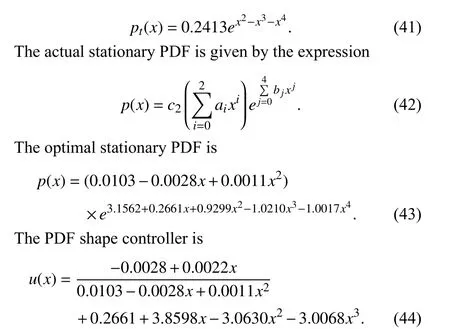
Through simulation experiments, the values ofwandnare the same as those in Case 1, so the actual stationary PDF devised is similar to (31). After optimizing the model parameters, we obtain the optimal stationary PDF
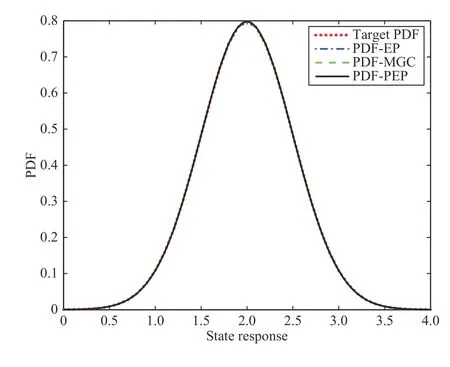
Fig. 1. Case 1: Symmetrical unimodal target PDF.

The comparison of the control effects for the three methods is shown in Fig. 2.
Fig. 2. Case 2: Asymmetrical unimodal target PDF.
C. Case 3
The target PDF is a symmetrical bimodal distribution, and the mathematical expression is
The PDF shape controller is
The comparison of the control effects for the three methods is shown in Fig. 3.
In this case, only three of the optimal parameters are not zero. That is, our proposed method only needs three parameters to achieve good control effects. The effect of the exponential polynomial method with six parameters is shown in Fig. 3.If we continue to increase the number of parameters in the exponential polynomial method and implement the test experiments, the order of the exponential polynomial could be as high as 20. This means that 21 parameters are needed to have the same control effect as our method.
D. Case 4
The target PDF is an asymmetrical distribution, and the mathematical expression is

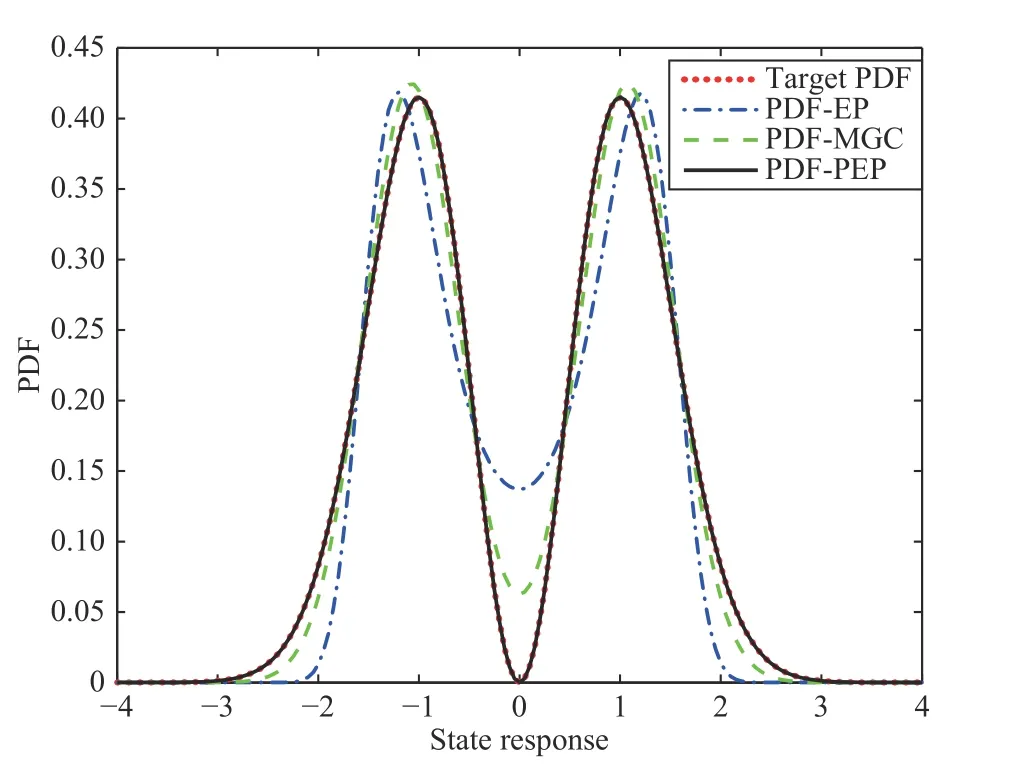
Fig. 3. Case 3: Symmetrical bimodal target PDF.
The comparison of the control effects for the three methods is shown in Fig. 4.
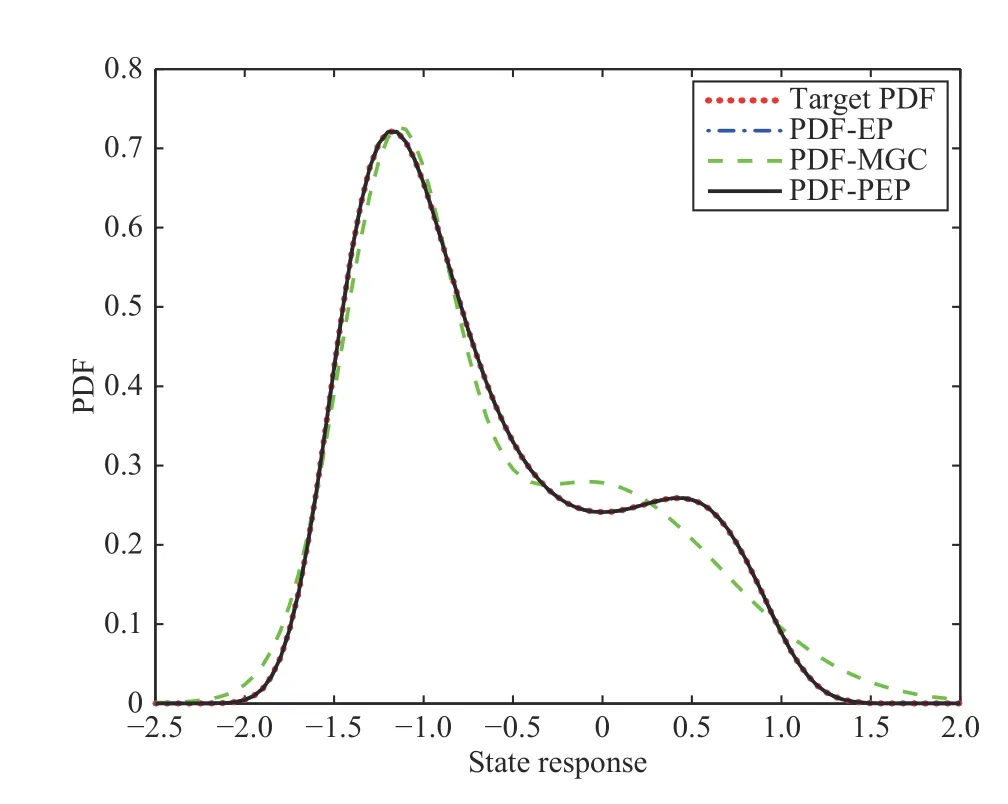
Fig. 4. Case 4: Asymmetrical bimodal target PDF.
For the above four cases, in order to more clearly analyze and illustrate the PDF shape control performance of the three methods, we provide the cumulative distribution function curve of the PDF by three methods as well as that of the target PDF, as shown from Fig. 5(a) to Fig. 5(d). CDF-EP (blue line)is the cumulative distribution function curve based on the exponential polynomial method, CDF-MGC (green line) is the cumulative distribution function curve based on the multi-Gaussian closure method, and CDF-PEP (black line) is the cumulative distribution function curve based on the proposed method in this study.
The integrals of square error for the different cases using the three methods were calculated and are summarized in Table I.IS EEP,IS EMGC, andIS EPEPindicate the integral of square error (i.e., the performance index) for the exponential polynomial method, the multi-Gaussian closure method, and the proposed method, respectively.
Meanwhile, we calculated the mean error and the variance error between the target PDF and the optimized PDF based on the three methods. The results are summarized in Tables II and III. Let the mean errorme=|mt−m| and the variance errorve=|vt−v|.mtandvtare the mean and the variance of the target PDF, whilemandvare the mean and the variance of the optimized PDF. In Tables II and III,meEPandveEPare the mean error and the variance error of the exponential polynomial method.meMGCandveMGCare the mean error and the variance error of the multi-Gaussian closure method.mePEPandvePEPare the mean error and the variance error of the proposed method.
To further validate the proposed method, we also calculated the third moment error and the fourth moment error of the optimized PDF in three methods, as shown in Tables IV and V. The third moment and the fourth moment are also called skewness and kurtosis, respectively. Let the third moment errorse=|st−s| and the fourth moment errorke=|kt−k|.standktare the third moment and the fourth moment of the target PDF, whilesandkare the third moment and the fourth moment of the optimized PDF. In Tables IV and V,seEPandkeEPare the third moment error and the fourth moment error of the exponential polynomial method.seMGCandkeMGCare the third moment error and the fourth moment of the multi-Gaussian closure method.sePEPandkePEPare the third moment error and the fourth moment error of the proposed method.
IV. RESULTS ANALYSIS
Figs. 1–4 show that the proposed PDF shape control approach has excellent control effects for the different target PDFs from unimodal to bimodal and symmetrical distribution to asymmetrical distribution. For the symmetrical unimodal target PDF, the control effects of three methods are very similar, as shown in Fig. 1. Illustrated from the CDF curves in Fig. 5(a), the control effect of the exponential polynomial method is slightly better than that of the other, but the difference in the performance of the three methods is tiny. In Figs. 2 and 3, the proposed method has a more pronounced advantage than the other two in PDF control effect, which is also proven by the CDF curves in Figs. 5(b) and 5(c). In Fig. 4,our method yielded comparable control effects as the exponential polynomial method and better results than the multi-Gaussian closure method, which keeps with the result in Fig. 5(d).
When the target PDF is a symmetrical unimodal distribution(Case 1) or an asymmetrical bimodal distribution (Case 4), the integral of square error of the exponential polynomial method is comparably smaller, as presented in Table I. This is because the target PDFs in Cases 1 and 4 are the exponential polynomial form. Therefore, with the same number of parameters,the exponential polynomial method has a smaller integral of square error than our method for the target PDFs with an exponential polynomial form. However, for the target PDF in Case 3, the control effect of the exponential polynomial method is much worse than our proposed technique using the same number of parameters. For the exponential polynomial method to achieve the same control effect as our method, the parameters would have to be increased considerably. For more complex target PDFs, the exponential polynomial method with a higher-order may have a better control effect than other methods, but at the cost of more parameters.
For all the analyzed cases (see Table I), our method has the smaller integral of square error than the multi-Gaussian closure method. The integral of square error of our method for the four cases in Table I are 10−7, 10−5, 10−11and 10−8,indicating a very small error accuracy for each case. The integral of square error of the exponential polynomial method is 1 0−1and that of the multi-Gaussian closure method is10−2for Case 3. Thus, the proposed method is fit for any of the four cases. In this study, what we control is the PDF shape of the state response. In Figs. 1–4, the PDF shape generated by our method is very consistent with the shape of the target PDF, which achieves our expected goal.
In Tables II–V, the errors of the first fourth moments of the exponential polynomial method for Cases 1 and 4 are much smaller than those of our method and the multi-Gaussian closure method. Under four cases, however, the order of magnitude of all the errors generated by our method is no more than 1 0−4, while by the other two methods, the order of magnitude of such errors includingmeMGC,veEP,veMGC,seMGC, andkeMGCis 1 0−1or 1 0−2in some cases. Even worse,the value ofkeEPin Case 3 is 1.6396. This is because the resulting PDF from our proposed control method can track the target PDF well for all cases, demonstrating that the overall control effect of our method is better than that of the other two methods. Therefore, controlling the shape of PDF means that each moment can also be controlled, as is in accord with the theoretical analysis in the introduction.

Fig. 5. The cumulative distribution function curves of the three methods.
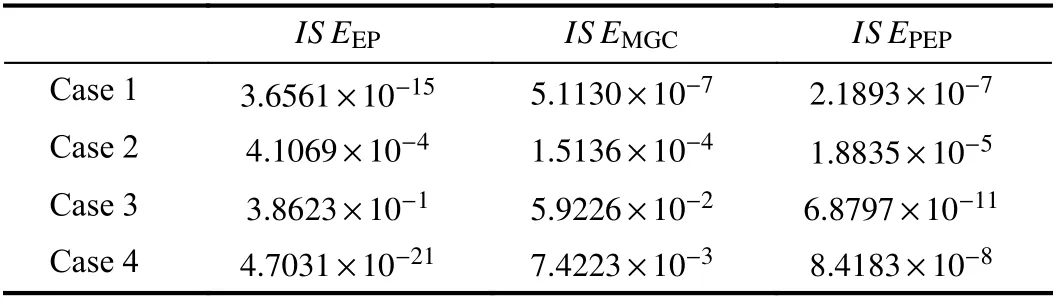
TABLE I THE INTEGRALS OF SQUARE ERROR OF THE THREE METHODS
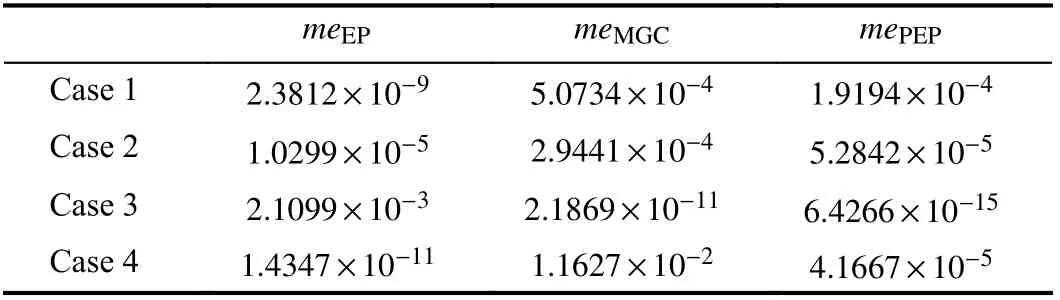
TABLE II THE MEAN ERRORS OF THE THREE METHODS
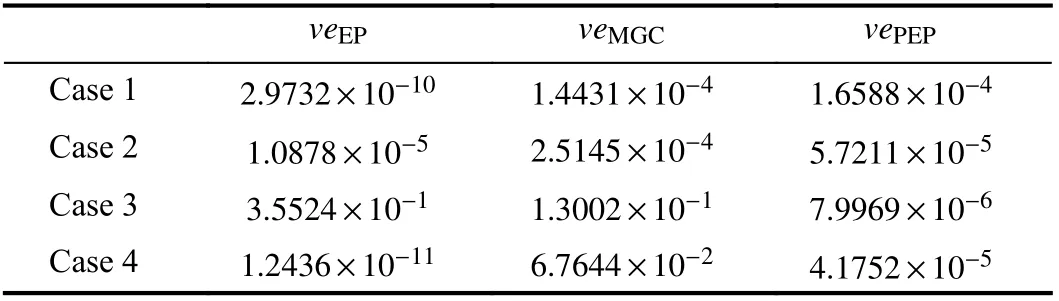
TABLE III THE VARIANCE ERRORS OF THE THREE METHODS
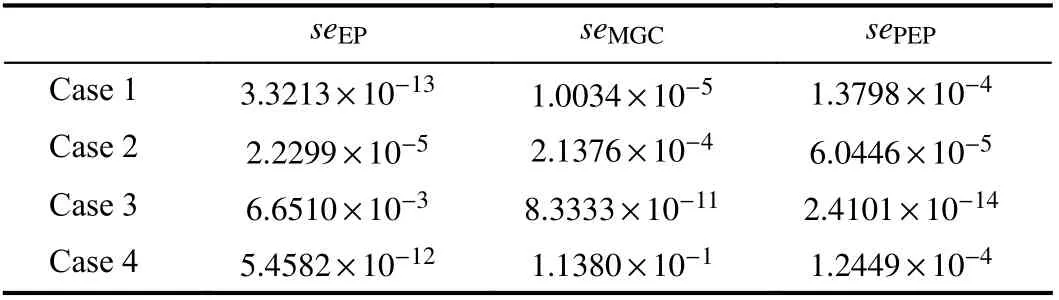
TABLE IV THE THIRD MOMENT ERRORS OF THE THREE METHODS
V. CONCLUSION
In this study, we developed a novel PDF shape control approach for nonlinear stochastic systems. The stationary PDF expression of state response is determined according to the exact analytical solution of the FPK equation, and thus ismore accurate than other approximate methods. The proposed method can be suitable for any nonlinear stochastic systems and make the PDF of state response match different target PDFs.
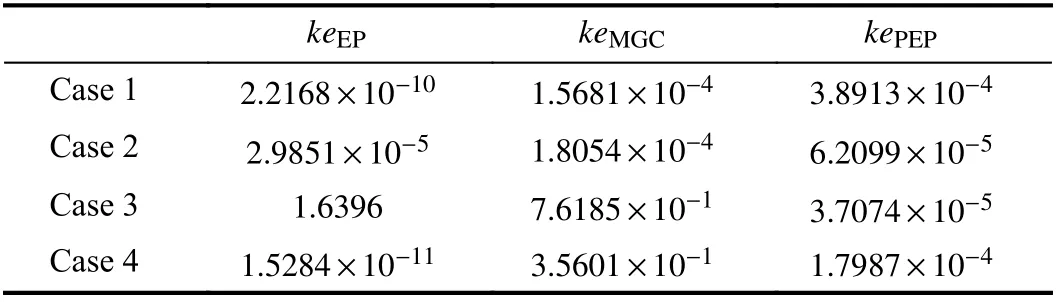
TABLE V THE FOURTH MOMENT ERRORS OF THE THREE METHODS
Given comparable numbers of parameters to be solved, our method can achieve a similar or better control effect as the exponential polynomial method. Compared with the multi-Gaussian closure method, our method has clear advantages in PDF shape control performance. When we calculated the integral of square error and the errors of the first four moments of the optimized PDF in three methods, the results show that the proposed approach provides better overall control results than the other two in all analyzed cases. Thus,the method proposed in this study provides an alternative for PDF shape control in nonlinear stochastic systems.
In this paper we mainly focused on one-dimensional systems suffering from Gaussian white noise. When a nonlinear system is multi-dimensional, there exist multiple random variables and the variables are coupled with each other. To determine the mean of multiple random variables, we need to calculate a multiple integral, while there is almost no way to obtain an exact solution of this integral in mathematics.Therefore, it is very difficult to solve the first-order moment(i.e., mean) of the state response in a multi-dimensional system, and even more difficult to solve the PDF containing high-order moments. In addition, for some nonlinear stochastic systems, the excitation is non-Gaussian white noise,such that the output or state variables of the system obey asymmetric random distribution. It is a great challenge to solve the FPK equation corresponding to those nonlinear systems subjected to non-Gaussian noise. Thus, the multidimensional nonlinear systems and systems with non-Gaussian noise would be considered in the future.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Consensus Control of Multi-Agent Systems Using Fault-Estimation-in-the-Loop:Dynamic Event-Triggered Case
- A PD-Type State-Dependent Riccati Equation With Iterative Learning Augmentation for Mechanical Systems
- Finite-Time Stabilization of Linear Systems With Input Constraints by Event-Triggered Control
- Exploring the Effectiveness of Gesture Interaction in Driver Assistance Systems via Virtual Reality
- Domain Adaptive Semantic Segmentation via Entropy-Ranking and Uncertain Learning-Based Self-Training
- Position Encoding Based Convolutional Neural Networks for Machine Remaining Useful Life Prediction