基于陀螺仪和LKJ2000 的机车前大灯随动控制系统
2022-08-12巩友飞周玉双
巩友飞,周玉双
(陕西铁路工程职业技术学院,陕西渭南 714000)
0 引言
近年来,随着铁路运输不断向高速化发展,铁路行车安全问题备受关注。传统的机车大灯照射采用固定方式,当列车行进在曲线铁路或弯道线路上时,其前大灯光束会延弯道切线方向向外射出,光束无法完全聚焦到安全距离范围内的铁轨中心线上,在曲线内侧形成照明盲区,机车司机无法观察到安全距离范围内的状况,存在较大的安全隐患[1]。因此,对机车前大灯的照明方法加以完善是非常必要的。
目前,国内许多学者从不同角度提出了多种铁路机车前大灯智能转向系统。如文献[2]中提出一种基于GPS 的机车头灯自动循迹系统,该系统由数据采集、数据处理和车载控制器3个子系统构成,其中GPS 数据采集装置必须对铁路线路进行单独测量,这不仅工作量较大,而且在偏远山区及隧道内GPS 信号接收较差,直接影响测绘结果。文献[3]中给出了基于线路曲线半径探测器的机车前大灯随动控制系统,其前照灯的实时位置信息通过角位移传感器进行采集,从而形成对机车前照灯转向机构的闭环控制,不过由于这种方法只有在机车到达弯道时方可动作,在机车行驶至弯道之前的一段直线上必然会存在转弯盲区。文献[4]中提出一种基于列车运行图的机车大灯智能转向控制系统,利用机车LKJ(列车运行监控记录装置)中存储的列车运行图,通过提前分析计算弯道对应的机车大灯转角数据,使大灯系统在机车进入弯道前的某个恰当位置,刚好转到需要的角度,以使大灯光束始终照射在前方轨道的中心位置,这种方法虽然解决了在弯道起始处存在弯道盲区的问题,但不适用于由于历史原因遗留的一些复杂曲线问题,如复曲线等。
针对铁路上机车前大灯存在的照明问题和上述解决方案的不足,提出一种具体的解决方法:通过列车运行监控记录装置LKJ-2000 和陀螺仪提供的转角数据库,以单片机控制为核心,以舵机为执行机构,实现对机车驶入曲线线路前后大灯转向角度的提前预测和实时控制,使其一直照在轨道中心线上。该方法可以适应不同的铁路线路,具有实用价值。
1 铁路线路分析
铁路线路一般有3 种类型,即直线线路、圆曲线线路和缓和曲线线路(图1)。其中缓和曲线线路的主要功能是连接直线线路与圆曲线线路,使线路在直线与圆曲线之间平缓过渡,当火车经过弯道时可以有效缓解离心力的突变,其曲率半径会在连接的直线与圆曲线的曲率半径之间变化。为改善旅客乘坐的舒适度,往往会在两条相邻的曲线线路之间设置一条夹直线线路。曲线线路半径与列车最高设计速度相关。在铁路线路建设中,为了方便设计、施工和养护,曲线线路的半径应遵循50 m 或100 m整数倍原则,并优先选用国标规定序列值;在测设或施工困难的路段,曲线半径可以按10 m 的整数倍选取[5]。
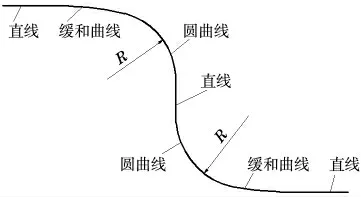
图1 铁路线路类型
将铁路线路中的弯道排序为直线—曲线—直线,其中曲线部分称为弯道,根据机车大灯在弯道起始点偏转后照射情况,可以将铁路线路分为2种:第1 种的弯道长度较短,大灯照射的中心点离开弯道;第2种的弯道长度较长,照射的中心点仍处在弯道之中。
2 可行性分析
LKJ-2000 是中国国产新一代自主研发的以保障列车运行安全为主要目的的列车速度控制设备,其屏幕显示器可以显示公里数、曲线半径、当前运行速度、坡道、纵断面、桥梁隧道和限制速度等实时信息。该设备在进行安全速度管理的同时,还收集记录与列车安全运行有关的各种机车运行状态信息,提高了机车运行管理的智能化,有效保障了旅客列车的安全平稳运行。可以根据LKJ-2000 监控装置主机中已经提前储备的列车实时信息,控制机车前大灯的智能转向。
陀螺仪在任何环境下均具备自主导航能力,可以将陀螺仪运用在铁路机车前照灯随动控制系统,利用陀螺仪测得转向架与车体的相对转角,判断列车是否进入曲线线路。列车驶入曲线后,通过测得的相对转角得到一定安全距离范围内机车大灯的相对偏转角,从而实现机车大灯随曲线变化的偏转,减小曲线内侧盲区。
为此,以LKJ-2000 和陀螺仪提供的线路数据为基础,以单片机控制为核心,以电子舵机装置为执行机构,实现了对机车前大灯的智能随动控制,主要控制方法,分为3 步:①机车驶入曲线线路前,以LKJ-2000 主机提供的机车行驶信息和道路数据库为依据,分析铁路线路类型,建立弯道曲线数学模型,提前生成直线段大灯转角数据库;②机车驶入曲线线路后,陀螺仪X轴检测到机车转向架与车体的相对转角和转动加速度,实时生成曲线段大灯转角数据库;③依据生成的大灯转角数据库,结合列车行驶速度,通过舵机带动前大灯沿曲线方向旋转,使其灯光始终聚集在弯道中心线上。
3 大灯偏转角数据库生成
3.1 直线段偏转角生成
机车在驶入曲线段起始点之前,大灯会逐渐地发生偏转,通过角度—线路模型,可以计算出直线段偏转角与线路位置之间的关系[6]。为方便单片机处理,需要对角度—线路的函数关系进行插值或拟合。
常见的曲线插值方法有拉格朗日插值法、牛顿插值法和三次样条插值法等,都是利用多项式建立插值函数的主要方法:①拉格朗日插值法虽然在理论分析中很方便,但是随着插值节点的增加、减少或其位置变化时全部插值函数均要发生变化,从而使插值公式的多项式结构也会发生变化,这在计算时非常不利;②牛顿插值法虽然克服了拉格朗日插值法的缺点,但是牛顿插值法插值多项式函数在插值条件较多的情况下,插值曲线的阶数会越高,这会使插值曲线振荡的可能性明显增加,在实际工程中使用较少;③三次样条插值法计算简单,稳定性好,收敛性有保证,但是计算量太大,不具有实用意义。
由于文献[6]中角度—线路模型为线性函数,所以本文选用最小二乘法曲线拟合,通过最小化误差的平方和寻找数据的最佳函数匹配,并简便地求得未知数据,使这些求得的数据与实际数据之间误差的平方和为最小,该方法能给出相对最优的参数拟合结果。通过最小二乘法曲线拟合,最终得到公里标、曲线半径和大灯转角间的关系,提前生成直线段大灯转角数据库。
3.2 曲线段偏转角生成
机车在驶入曲线线路后,陀螺仪X轴检测到机车转向架与车体的相对转角,可以直接得到公里标、相对转角和大灯转角间的关系,实时生成曲线段大灯转角数据库。
4 系统工作原理
4.1 系统方案
机车前大灯随动控制系统包括2 片AVR 单片机组成的MCU 微控制器模块外,还包括LKJ-2000 光电隔离接口、陀螺仪、舵机和大灯限位开关等外围硬件模块(图2)。
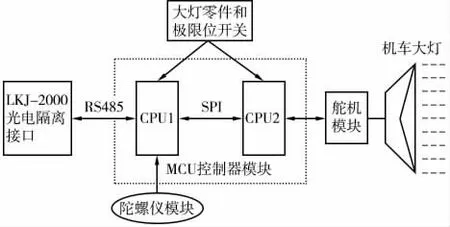
图2 系统总体框图
(1)控制模块。MCU 控制器模块选用ATMega16,内部为双核CPU。其中CPU1 与LKJ 通信时,主要采集机车进入曲线路段前的道路数据库,并计算直线段大灯转角;与陀螺仪通信时,主要采集机车驶入曲线线路时的线路数据库,并计算曲线段大灯转角。CPU2 则负责接收CPU1 的角度信息,完成对舵机的开环控制。
(2)光电隔离接口。LKJ-2000 光电隔离接口选用光耦芯片PC817,其输入端属于电流型工作的低阻元件,具备强大的共模抑制能力。在长线信息传输系统中充当终端隔离元件,能够明显增加信噪比;在系统数字通信和实时控制过程中充当信号隔离的连接器件,能够可以大大增加控制系统管理工作的可靠性。
(3)陀螺仪。陀螺仪使用MPU6050 模块,内部整合了三轴陀螺仪和三轴加速度传感器,既避免了组合陀螺仪与加速度传感器轴间偏差的现象,也减少了安装空间。当机车在曲线段行驶时,可以通过安装的转向架陀螺仪模块检测到X 轴方向变化和变化的快慢,进而生成大灯曲线段的转角。
4.2 执行机构
由于列车运行环境恶劣,常在雨雪、风沙、高温和极寒等极端天气中运行,车下空间狭小并伴有剧烈的振动和电磁干扰,转弯时要求前大灯能随曲线线路迅速响应并转向。因此在选择执行机构时,需要其响应迅速、运行稳定可靠、电磁干扰小,并有较大的能量转换效率和较小的重量与体积。
舵机就非常适合成为该系统的执行机构,其主要是由外壳、电路板、驱动电机、减速器与位置检测元件等构成。与同功率的铁芯电机相比其优势非常明显:①响应速度极快,很多产品可以在10 ms 以内;②自适应能力强,运行非常稳定,自身转动的波速可以控制2%以内;③采用高品质电刷和换向结构,换向火花小,因此抗干扰能力强;④重量和体积大幅度减小,能量转换率高,效率可达70%以上;⑤转速—转矩、转速—电压和转矩—电流等对应参数呈线性关系。
本文选用的舵机模块是MG996 模块,其工作原理是由MCU 控制模块发出讯号给舵机,经由电路板上的IC 驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。其中位置检测元件的核心为可变电阻,当舵机转动时电阻值也会随之改变,通过检测可变电阻的电阻变化量即可计算出转动的角度。该舵机带有反馈环节的伺服电机,可以通过舵机进行机车大灯精确的位置控制,舵机输出轴的位置经由内部电位计不断地采样测量,并与由MCU 控制模块所计算的机车大灯偏转目标位置进行对比,根据相应的偏差,系统就会自动调整舵机输出轴的实际位置,使之与目标位置相符,并由此建立了闭环控制系统。
5 结语
本文利用目前机车上已广泛安装的LKJ 监控系统外加陀螺仪定位监测等设备,实现机车前大灯的随动转向控制,具有如下优势:①测控方法简单、数据处理精准可靠,硬件性能稳定;②针对路线实际特点,采用安全性和稳定性较好的控制方法,使机车前大灯随动控制,不受环境和线路条件的限制。
