基于半监督聚类算法的水利枢纽工程设备自适应PID控制系统
2022-08-12唐顺田
唐顺田
(莒南县石泉湖水库管理所,山东 临沂 276600)
0 引言
水利枢纽指的是水工建筑的综合体,主要修建在河流和渠道地段,且该建筑的类别根据实际情况存在差异,建设水利枢纽的主要目的是保证各项水利工程的兴利除害。水利枢纽主要由挡水、泄水、蓄水以及专门性四类建筑物以及航运、鱼道、交易通道等多类工程组成。水利枢纽在建设过程中,需结合工程设备完成[1]。工程设备指的是,水利枢纽建筑工程中使用的机电设备、金属结构设备以及相关仪器装置等[2],该类设备在使用和运行过程中通常采用PID控制系统对其运行实行控制[3],且在该控制过程中,需依据水利枢纽工程设备的数据完成[4]。该控制系统作为一种线性控制,其控制原理简单、应用范围较广,依据误差确定控制量[5],以此实现目标控制。半监督聚类算法是数据挖掘中的一种常用的聚类算法,其在模式识别、空间数据分析、异常检测以及数据流挖掘等领域均具备良好的应用效果。
为实现PID控制系统的良好控制效果,文献[6]和文献[7]分别对其控制原理实行分析后,研究基于Smith预估器模型和基于MPSO的自适应模糊PID控制。上述方法在控制过程中,对于控制目标数据的利用仍旧存在一定局部性,无法全面利用控制目标的数据,因此,该文为实现PID控制系统的更佳控制效果,研究基于半监督聚类算法的水利枢纽工程设备自适应PID控制系统的自适应控制方法,该方法采用径向基函数神经网络(Radial basis function network,RBF network)对水利枢纽工程设备PID控制系统实行自适应在线调节,并采用蚁群算法对该控制系统实行优化,并在优化过程中,采用半监督聚类算法完成调节参数的聚类,完成调节优化,提升PID控制系统的控制效果。
1 水利枢纽工程设备自适应PID控制系统
1.1 基于RBF network的工程设备自适应PID控制系统
由于水利枢纽工程设备的运行具备多变量、非线性等特点,则基础PID控制系统在控制过程中存在局部性,影响控制效果,因此,该文在采用RBF network模型对PID控制系统实行在线调整,实现PID控制系统参数自适应,提升PID的控制效果[8]。基于RBF network水利枢纽工程设备自适应PID控制系统结构如图1所示。
图1中,rim(k)和ym(k)均表示工程设备的功率,前者对应设备输入参考;后者对应该文设计的控制系统的识别输出;RBF network模型的实时调整参数增量为Δkp,Δki,Δkd表示。RBF network模型为实现对工程设备自适应PID控制系统的在线调节,需对自身权系数实行调整后,对控制系统的误差实行对比[9],并获取恰当的PID参数,以此能够最大程度实现PID控制系统的控制性优化。
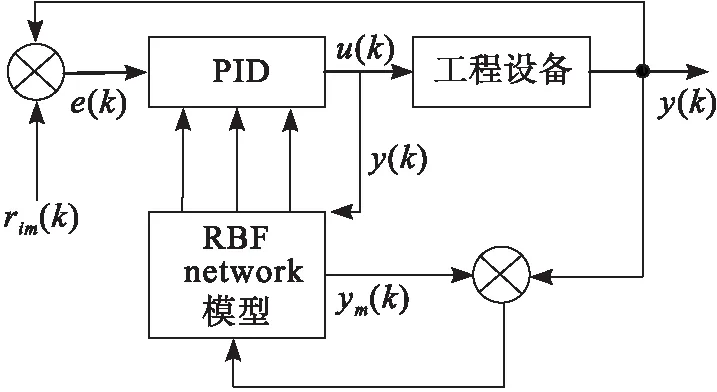
图1 水利枢纽工程设备自适应PID控制系统结构
图1中PID控制系统的设计采用增量式PID控制完成[10],该控制误差的计算公式为:
e(k)=(k)(rim-y)ψ
(1)
式中:ψ表示控制系数;控制器的输出用u(k)表示,其计算公式为:
e(k-1)]}
(2)
增量型PID控制算法的计算公式为:
(3)
PID控制器的输入计算公式为:
(4)
RBF network模型的性能指标函数为:
E(k)=0.5e(k)2
(5)
Δkp,Δki,Δkd三个参数的增量的调整采用梯度下降法完成,其公式为:
(6)
式中:ηp,ηi,ηd均表示学习速率,对应三个参数,且均属于RBF network模型;x表示该模型的输入向量。

(7)
式中:Cij表示节点中心;ωj表示输出权重;hj表示高斯函数;bj表示基宽带,该值大于零。
基于上述内容可知,采用RBF network模型对PID控制系统实行在线调整,主要是通过自适应的方式实现PID参数的调整,则调整后的PID参数为:
(8)
式中:kp,ki和kd均表示调整后的参数,且将该参数输入至PID控制器中。
1.2 PID控制系统在线调节RBF network模型参数优化
RBF network模型在对PID控制参数实行调整过程中,为了保证调整结果的合理性和最佳性[11],采用蚁群算法对其实行优化,该优化分为两部分,一是基于半监督聚类算法对RBF network模型的在线调节参数实行聚类;二是采用蚁群算法对聚类结果实行寻优。
1.2.1 PID控制系统在线调节模型参数聚类
该文采用基于层次策略的散布种子中心半监督聚类(scattered seeds medoids clustering,SSMC)算法完成RBF network模型参数聚类,该算法的聚类共分为3步:第一步是采用边缘因子完成RBF network模型参数的在线调节所需的分层处理,将其划分成核心层和边缘层,同时能够完成参数集中离群点和噪声点干扰的处理;第二步是完成核心层聚类,其采用基于散布种子的半监督K-medoids算法实现;第三步以半监督策略为前提,采用分配方式,完成边缘层的簇处理,该处理需在核心层中进行,以此获取在线调节参数的聚类结果[12]。
采用边缘因子在对原始参数集实行分层处理时,需先对边缘因子、边缘点、边缘层、核心点以及核心层实行定义。
第一步:基于边缘因子完成原始参数集的分层
采用边缘因子完成原始参数集的分层处理的步骤如下所述:
输入:原始参数集数D、邻域常数k以及边缘比例因子i。
输出:边缘层BL和核心层CL。
(1)计算各个p对应的BF(p)结果,且p属于D中;
(2)依据所有计算获取的BF(p)结果,对p实行排序,且按照由大到小的顺序完成,采用其中的第int(iN)个值描述t;
(3)完成子集划分,形成子BL,其由边缘点组成,且所有的点对应的BF(p)需大于t,剩余的样本则为核心点,组成CL。
第二步:核心层聚类
为实现该层中参数聚类,获取初始聚类中心的种子,需实现标记参数的初始化处理[13],其基于散布种子的半监督K-medoids算法完成;为获取标记参数的监督信息,采用半监督约束K-medoids算法实行求解,以此可提升局部空间数据分布信息的挖掘效果。但是由于标记参数在获取过程中具备随机性,其在局部空间内存在重叠现象,分散度较差,因此,采取合并的方式对簇实行处理,并获取合并后的簇中心[14]。合并的条件为:当前簇中所包含的数量小于k、且当前簇类别与标记参数类别的簇种子相等时,详细步骤如下所述:
输入:CL和标记参数集LD。
输出:CL中的参数聚类结果CLr。
(1)设Lpi表示全部的标记参数,且Lpi∈CL∩MD,并位于CL中,对其实行初始化处理后得出簇中心,用ci表示;并采用初始化对Ci={ci}实行处理;
(2)计算全部非标记参数p,并获取与其相似度最高的簇中心[15],将p划入其中;
(3)判断簇是否符合合并条件,并对合并后的簇中心实行求解以及簇合并处理;
(4)获取每一个Ci以及其均值μi,将与μi之间距离最小的样本实行更新,并定义其为新的聚类中心;
(5)重复上述(2)~(4)步骤,当全部的簇中心不会产生变化后停止;
(6)以Ci中Lpi的信息为以依据完成全部子簇的合并处理,以此获取CLr结果。
第3步:基于半监督策略的边缘层分配
输入:BL和CLr,输出聚类结果C={C1,…,Ck}。
(1)将BL(p)的结果按照由小到大顺序实行排列。
(2)获取边缘层中的第一个样本p,同时在核心层中获取与p之间距离最小的样本q;
(3)设定p和q的簇标记相等,向CLr中划分p;
(4)重复(2),当BL为空时停止。
1.2.2 基于蚁群算法的PID控制系统调节参数寻优
RBF network模型中Cij和bj的取值直接影响RBF network模型对PID控制系统的在线调整效果,因此,蚁群算法寻优目的即为获取两者的最佳取值,保证在线调整效果。寻优步骤如下所述:
(1)通过初始化获取不用的CLr,且数量为k;
(2)计CLr算和样本输入k的距离;
(3)为获取新的聚类中心,计算分类样本平均值;
(4)过程初始化,在数量为n的样本上部署数量为m的蚂蚁,同时记录蚂蚁的初始位置,且在禁忌表中完成。

(9)
式中:iallowedn表示参数样本,其中不包含禁忌表;Q为正常数。
(5)依据公式(9)的计算结果,获取τij,其属于Xi与聚类中心cj(t)之间,并将cj(t)加入tabum中;
(6)求解Δτij(t+1),确定Xi的分类依据,即为Xi与cj(t)之间的τij(t),以此完成Xi分类,新的聚类中心cj(t+1)则可采用分类后Xi的均值描述;
(7)以所有cj(t+1)为依据,计算其相互之间的距离,并完成bj的计算,bj=σdi。其中di表示距离,对应两个聚类中心之间,分别为第i个和与其距离最小的;σ表示重叠系数;Cij=cj(t+1)。
2 测试分析
为测试该文方法对于水利枢纽工程设备PID控制系统的控制优化效果,以某地区的水利枢纽工程中的大型蓄能电站机组为研究对象,获取其PID控制系统1个月的数据为测试数据,采用MATLAB按照图1的控制结构进行仿真测试。
参数设定:RBF network模型的隐含节点数量为8,学习速率取值为0.25,惯性系数取值为0.06,权重分别为0.32、0.4以及0.15;PID控制系统的初始参数kp、ki、kd的取值分别为0.4、0.2、0.4,。蚁群规模为30,最大迭代次数为240次,聚类数量为4,σ取值为1。
为衡量该文方法对PID控制系统的在线调节效果,采用该文方法对实验对象的PID控制系统的kp、ki、kd实行在线调节,自适应调节结果,如图2所示。
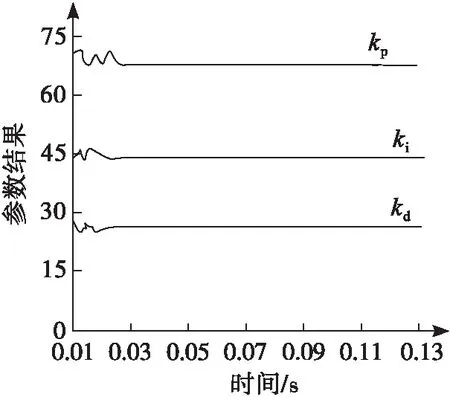
图2 自适应调节测试结果
依据图2结果可知:该文方法在对PID控制系统的kp,ki,kd参数实行调节过程中,3个参数在0.04 s时,则达到稳定状态,自适应曲线不再发生变化。因此,表示该文方法具备良好的在线调节效果,能够快速完成调节动态响应。
为衡量该文方法的聚类效果,采用互信息和兰德指数作为评价指标,测试该文方法在不同比例的监督样本下,两个指标的结果,如图3所示。两个指标的计算公式为:
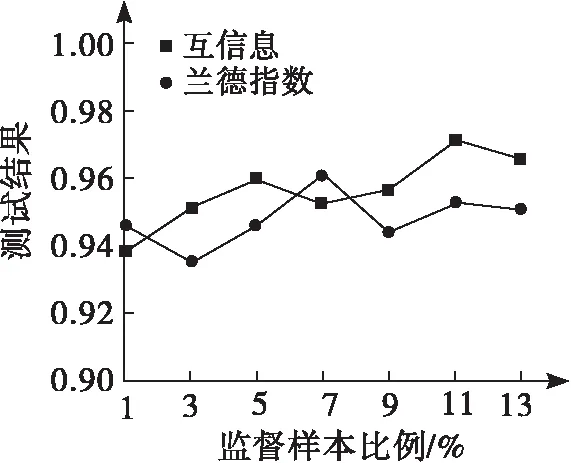
图3 聚类效果测试结果
(10)
(11)
依据图3结果可知:随着监督样本比例的逐渐增加,MI(A,B)和ARI两个指标的测试结果均在0.93以上,最高值分别达到0.97和0.96左右,因此,该文方法聚类效果良好,能够为模型寻优提供可靠的数据依据。
为衡量该文方法对PID控制系统的在线调节效果,以相对值作为衡量标准,测试PID控制系统经过在线调节,在存在干扰和没有干扰两种情况下,PID控制的相对值,该值越接近1表示,控制效果越好,控制过程中,相对值的波动变化越稳定,表示控制效果越佳,如图4所示。

图4 在线调解效果测试结果
依据图4结果可知:经过该文方法在线调节后,PID控制系统在有干扰和无干扰两种情况下的相对值均在0.95以上,并且波动幅度较小,在0.96~0.98的范围内,因此,该文方法可对PID控制系统实行良好的在线调节,最大程度保证PID的控制效果。
水利枢纽工程应用过程中,蓄水是其一个主要的作用,因此,衡量该文方法优化后PID控制系统实行在线调节和优化后,PID控制系统在蓄水水头高度为300 m时,控制效果,其通过控制后工程设备机组的转速超调量、转速上升耗时以及稳态误差三个指标数据体现,结果如图5所示。
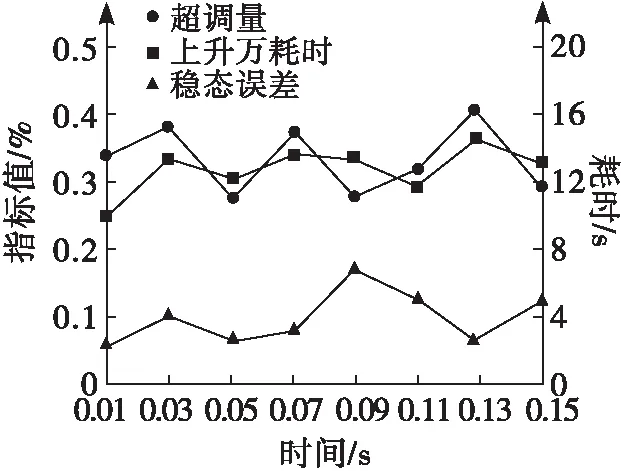
图5 优化前后的控制效果测试结果
依据图5结果可知:优化前PID控制系统控制后,工程设备机组的3项指标数据结果与优化后的指标数据结果存在明显差异,优化后的结果显著优于优化前的结果,其超调量均低于0.5%、转速上升耗时均在18 s以下,稳态误差低于0.2%。
为进一步衡量该文方法的控制效果,以工程设备的控制输出结果进行评价,获取在不同运行功率下,控制响应的输出结果(期望标准为在0.03 s内达到稳定状态),测试结果如图6所示。
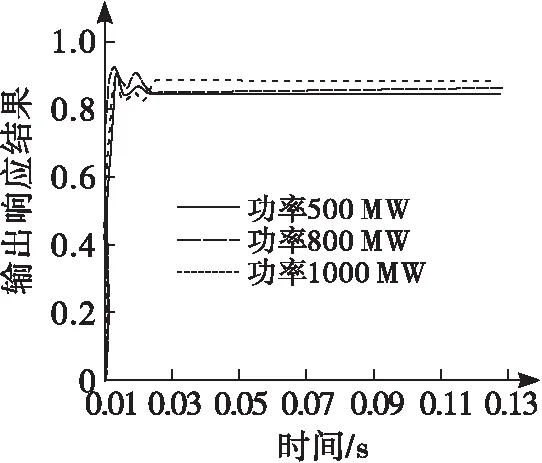
图6 控制响应的输出结果
依据图6结果可知:在不同功率下,该文方法应用后PID控制系统的控制响应结果均可在0.03 s完成输出响应,满足控制需求。该结果进一步体现该文方法的控制优越性以及应用性,能够最大程度提升PID控制系统的控制效果。
3 结论
水利枢纽工程中包含的工程类别较多,各个工程类别均通过不同的工程设备完成运行,该类设备在运行过程中,为保证水利枢纽的整体管理控制效果,通常采用PID控制系统完成。该文为提升水利枢纽工程设备的PID控制效果,研究基于半监督聚类算法的水利枢纽南工程设备自适应PID控制系统优化方法。经测试:该文方法能够实现PID控制系统相应参数的在线调节,并且聚类效果良好,可有效完成在线调节参数的聚类,完成最优参数获取,提升PID控制系统的控制效果,保证PID控制系统在水利枢纽工程设备控制过程中的稳定性。
