六相横向磁通电机控制策略研究
2022-08-12蔡睿眸
鲍 鹏,蔡睿眸
应用研究
六相横向磁通电机控制策略研究
鲍 鹏1,蔡睿眸2
(1. 武汉船用电力推进装置研究所,武汉 430064;2. 广船国际有限公司,广州 511464)
横向磁通电机以其独有的结构特点,实现电动机各绕组每相之间独立隔离。本文重点研究六相横向磁通电机控制策略,基于一种改进的各相绕组每相独立控制方法,有效实现了各相绕组之间独立隔离,抑制了由各相间的相位和大小偏差引起的电机电流波动。
六相横向磁通电机 转矩密度 独立控制
0 引言
电力横向磁通永磁电机(TFPMM)既保留了横向磁通高转矩密度的特点,同时结合了永磁电机高效率、高功率因数的特点,受到各国研究者的广泛关注。针对横向磁通电机使用场合不同,各国已研制了多种样机,填补了横向磁通电机研究领域的空白。德国于1988年率先研制了首台45kW 横向磁通永磁电机样机,1999年又将TFPMM作为电动车发展优选部件之一。英国罗尔斯罗伊斯公司(Rolls-Royce)制造的横向磁通样机采用了聚磁双边结构,在体积增加较少的情况下获得了加倍的转矩。瑞典皇家技术学院的样机三相布置在同圆周上,结构简单,易于加工,但是没有采用聚磁结构,它的功率因数与转矩密度较低[1-4]。国内虽开展相关研究起步较晚,但目前已有不少样机研制成功,取得了不俗的成果。兰州理工大学、沈阳工业大学、华中科技大学、中船重工第七一二研究所在横向磁通电机方面做出探索研究。
1 系统配置及控制方法
1.1 系统配置
本项目组设计制造了一台200 kW六相横向磁通永磁电机(双三相互差30°),电机参数见表1。磁通方向与转子旋转方向垂直的电动机称为横向磁通电动机。目前大多数TFM采用永磁材料,这样的TFM又可称为永磁横向磁通电动机(TFPMM)。上述定义较为抽象,但我们可以根据其描述,得知它有别于其他类型电动机的特征:
1)电动机各相定子绕组之间完全独立,因此可以不考虑由相间电磁耦合引起的分布参数问题;
2)电机磁场路径可以实现真正意义上的三维建模;
3)电机定子绕组由其线圈及特定配套的铁芯组合而成,与传统电机相比更利用独立控制;
4)基于集中式的转子磁通设计,可以在定转子绕组间形成稳定的高气隙磁密;
5)在电机本体设计中可更优化设计线圈及磁路结构尺寸。
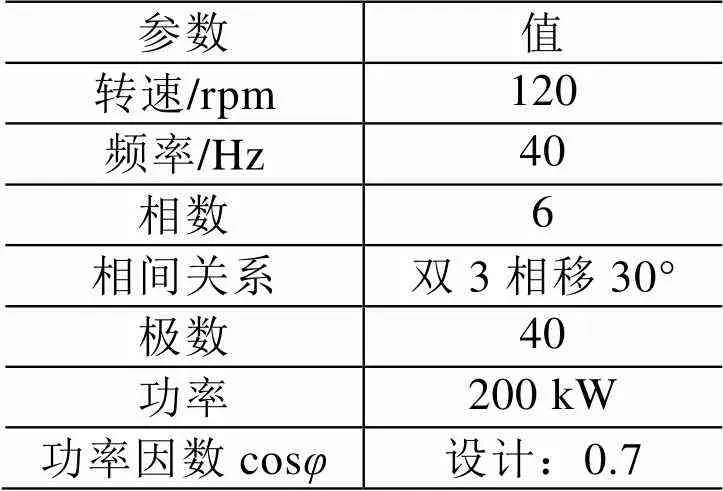
表1 横向磁通电机参数
传统电机采用径向磁通设计,但对于低速和尺寸需求较小的情况下,其比转矩无法满足要求。因此,横向磁通电机(TFM)成为了更好的选择,其主要优缺点如下:
1)在一定转速下,TFM 的功率随极对数增加而增加,且其极对数能做到相对较大的数值;
2)相比较来说,TFM的转矩密度更大,这使其能在低速运行时仍保持高效率和大转矩的输出;
3)若想实现TFM转矩最大化的要求,其总功率需求增多,电机功率因数随之减小;
4)由于TFM的设计制造技术有待提高,因此目前安装较为复杂,制造难度大。
根据上述第3)条特点可知,虽然TFM的转矩密度可以达到径向电机的几倍,但其功率因数与转矩密度的矛盾成为制约其发展的因素[5]。
1.2 三相横向磁通电机改进各相独立控制
本文研制的TFM结构为:采用模块化设计,基于许多个小功率电机模块,每个模块只需一组集中式绕组,且各相绕组之间实现了完全的电磁独立,每个模块由一相或多相组合而成,方便控制,不需要额外地引入电机换相装置。
对各相绕组进行独立控制时,实际上就是对多个单相电机进行控制。一般情况下,可选择的控制策略如下:
1)转速环与电流跟踪型控制。但由于电流跟踪控制会影响开关器件的开关频率,因此很少在中、大功率变换器中采用该方法。
2)双闭环控制。其中外环为转速环,内环为电流环。此时,电流环控制可以采用两种方法:第一种是只需PI调节器的介入即可,但其对交变量误差的调节效果并不明显,稳态时电流将存在静差。第二种是利用电流环在旋转坐标系下的轴电流分量进行PI调节,此方法一般应用于三相电机系统中。但由于横向磁通电机的控制相当于对多个单相电机进行控制,而只有一相电量是无法直接进行旋转坐标变换的。因此,需要找寻相应方法,使其在单相的旋转坐标系下,实现电流的闭环控制。
根据本文研究,建立了各相独立控制的控制框图,如下图:

图1 横向磁通电机控制框图
仿真结果如下:

图2 三相电流仿真图
根据上述控制框图,由仿真结果可知,三相电流得到了完全的解耦控制。但是,经过了1s/2r的坐标变换,生成的轴参数中含有丰富的交流信号,如下图所示,在仿真中,该交流信号可以用较大的控制参数进行抵消,但实际工程使用过程中,这种控制参数的设置不符合实际的,因此不能直接将此方法用于实际控制中,需对该方法加以改进,使电机系统能满足实际工程需求。

图3 d、q轴交流信号仿真图
2 三相横向磁通电机的改进各相独立控制
2.1 常见单相系统旋转坐标变换原理(1/4周期延迟等效法)
运用旋转坐标变换的方法,设电机中任一单相正弦量(t),三角函数变换后得式(1):
()=Xcos(0-)=Xcoscos(0)+Xsinsin(0) (1)
在上式基础上,我们令:


由式(1)和(2)可知,在单相系统中,若想解决稳态电流存在静差的问题,需要求解一个直流量,通过调整PI调节器的参数,将该直流量抵消后,即可实现无静差的调节效果。其一般解决方法为:基于Park变换,在两相静止坐标系中引入虚拟向量,可以实现电机交流电流等效为旋转坐标系中的直流分量。
2.2 三角函数法
本文所述的三角函数法,首先引入虚拟的静止分量,然后在永磁电机的前提下,建立、、及轴,这里定义轴超前轴90°,轴超前轴90°。
()=Xcos(+)=Xcoscos- Xsinsin(3)
同3.1节中描述一致,令:


由式(5)得到:

令轴同向,可得下式:
X=x()=Xcos(+)=﹣Xsin
X Xsin(+)= Xcos(7)

需要注意的是,当采用i≠ 0的控制方式时,尽管检测到的i*不为0,但并不与设定值相吻合,即和i*的设定不吻合。因此,为了更好实现控制功能,实际上通过调整,仍用i=0控制方式来实现。仿真结果如下图所示:

图4 三角函数法控制时电流仿真图
各相电流平衡,实现了三相的完全解耦,且各相的分量是直流量,便于数字化实现,如下图:
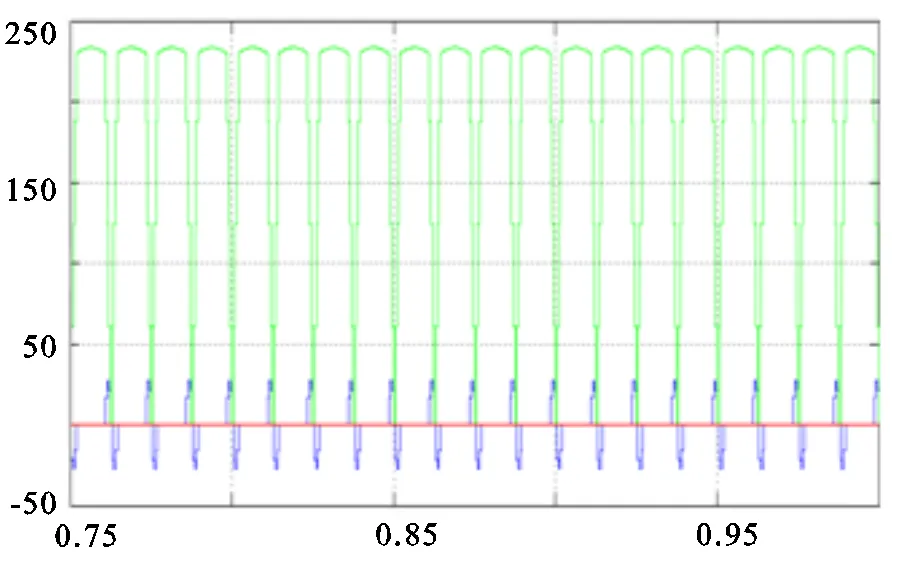
图5 d、q轴电流分量仿真图
图中的分量尖刺是在进行数字实现时,函数限幅所导致的,其趋势是直流量,便于各通道的独立控制。
因此,必须对ctan函数进行限幅,从仿真的结果看,正限幅在[2,10]取值均符合上述仿真结果。
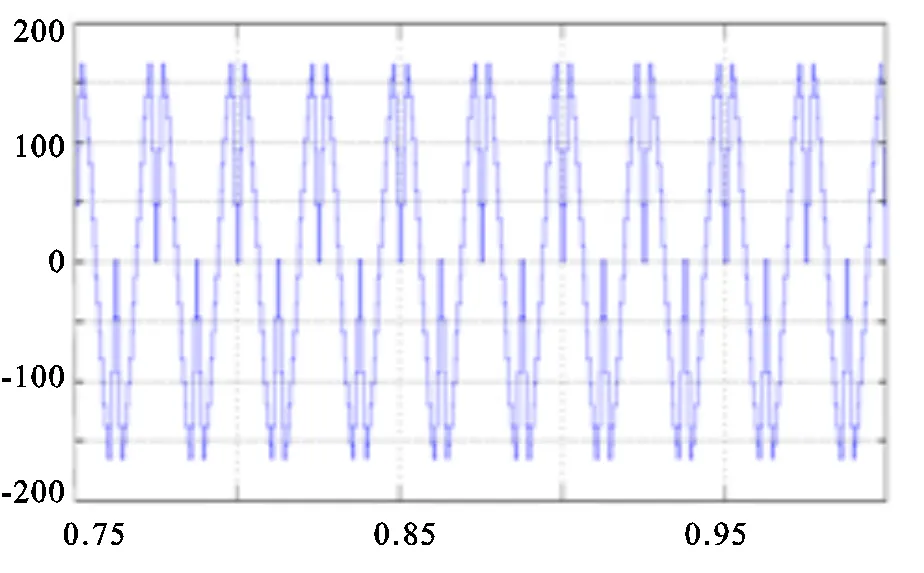
图6 d、q轴电流分量尖刺图
分量的尖刺来源于分量在波谷和波峰处的0值尖刺,如图6所示。
去除尖刺采用的常用方法为平均值法。但由于该尖刺为脉冲干扰所导致的,如果不对平均值法加以改进则会把干扰平均到结果中去,不能够较好的消除其产生的误差。为此,通常先去掉数据中的最大值和最小值,然后计算剩余数据的算术平均值,就可以解决尖刺问题,然而,平均值法的使用也有自身的局限性:
1)分量为交流信号,而防脉冲干扰平均值滤波是对交流量进行滤波,会改变信号的幅值和相位;
2)、轴分量是直流量,在稳态系统中,可以选择用平均值滤波法去除尖刺,但电机是在动态运行过程中,该滤波方法会延迟反馈值,影响电机的动态性能。
由此可见,上述缺点严重的限制了三角函数法在横向磁通电机中控制的使用。
2.3 改进型三角函数法
本文基于上述理论,对三角函数法进行改进。根据上述讨论可知,XX可由X的三角函数来表示,即:

通过等式变换,可得:

因此,仅当sin较大时,我们需要重新计算X的大小。即当∈[π/2-Δ, π/2+Δ]或者∈[3π/2-Δ, 3π/2+Δ]时,求X再由X=Xcos得到X。

图7 改进型三角函数法仿真图
之后通过变换求得X,X的值为:
d、q分量如下:
利用id=0控制策略时,横向磁通电机各相输出电流如图9所示。从输出电流结果可以看出,改进型三角函数法能够对横向磁通电机起到很好的控制作用,同时也弥补了三角函数法的缺点。

图9 改进型三角函数法电流仿真图
3 结论
本文通过仿真分析,基于一个200kW横向磁通永磁电机,采用改进的三角函数法,实现了横向磁通永磁电机各相绕组之间独立控制,达到各相绕组独立隔离的目的,抑制了由各相间的相位和大小偏差引起的电流波动。与传统电机相比,在电机本体结构设计时更有优势。
[1] Mitcham A j. Transverse flux motors for electric propulsion of ships[C]. Conference of IEE, London, UK, 1997.
[2] French C D, Hodge C, Husband M. Optimised torque control of marine transverse-flux propulsion machines[C]. Conference of IEE, Bath, UK, 2002.
[3] Payne B S, Husband S M, Ball A D. Development of condition monitoring techniques for a transverse flux motor[C]. Conference of IEE, Bath, UK, 2002.
[4] 刘哲民, 陈谢杰, 陈丽香, 王秀和, 唐任远. 基于3D-FEM的新型横向磁通永磁电机的研究[J]. 电工技术学报, 2006, 05: 19-23.
[5] 李亚旭. 横向磁通电机拓扑结构初析[J]. 船电技术, 2003, 23(1): 8-12.
[6] 肖汉, 曾岳南, 唐雄民. 基于旋转坐标变换的单相电压型PWM整流器系统仿真[J]. 通信电源技术, 2009, 26(05): 43-46.
Research on control strategy for six phase transverse flux motor
Bao Peng1, Cai Ruimou2
(1. Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China; 2. Guangzhou Shipyard international Company Limited, Guangzhou 511464, China)
TM351
A
1003-4862(2022)04-0041-05
2021-08-09
鲍鹏(1992-),男,工程师。研究方向:船舶电力推进系统。E-mail:134014560@qq.com
